STM32F107+LWIP+FreeRTOS
STM32F107+LWIP+FreeRTOS
前言
最近在学习LWIP的协议栈,打算移植到FreeRTOS上
网上找了资料,原子的用的是F4的平台,LWIP1.4.1的版本,操作系统使用的是UCOS的,野火使用的是LWIP2.0.1的版本,操作系统使用的是FreeRTOS的,但是用的是HAL库,不太适合我这种初学的。所以只有自己捣鼓了。
本人使用:STM32F107+LWIP1.4.1+FreeRTOS9.0.0
先来了解下LWIP
链接: link.
本文使用的网卡PHY芯片型号是DP83848,工作在MII接口模式,时钟频率是25MHz。
现在的LwIP版本已经发展到了lwIP 2.0.3 版。
但是看了具体的代码后发现一些跟1.4.1对比之下不同之处,其中包含但不全部:
1、IPv4和IPv6的实现代码混合起来,而1.4.1是分开的,通过预处理宏可以分开编译。
2、增加了一些常用的网络组件或应用程序,其中包括了基于tcp接口实现的MQTT协议。
本人也曾试图移植lwIP 2.0.2,发现IPv6实现会被编译进去,并且由此产生一些函数调用问题,在我们的固件库中以及mdk的库中不支持相关函数,另外,本项目用的芯片并不支持IPv6,而相关代码会增加ROM空间的占用,没有必要,而LwIP2.0.2以上的版本所带的MQTT协议实现也可以移植过来到LwIP-1.4.1上使用。
因此还是选用LwIP的1.4.1这个经典版本。但后面的MQTT协议实现没有用LwIP2.0.2版的实现代码,而是比较接近paho.mqtt.embedded-c版的一个实现。
以下是具体移植过程:
LwIP的官方网站:http://savannah.nongnu.org/projects/lwip/
LwIP-1.4.1下载地址:http://download.savannah.nongnu.org/releases/lwip/lwip-1.4.1.zip
或:http://ftp.yzu.edu.tw/nongnu/lwip/lwip-1.4.1.zip
或:https://gitee.com/null_926_6734/CongXiangYingGuanFangHuoQiJingXiangXiaZaiDeMouXieYuanDaiMa/raw/master/lwip-1.4.1.zip
contrib-1.4.1.zip
contrib-1.4.1里面含有官方的移植示例,有windows和unix操作系统下的移植,和某些非操作系统的移植。
在本项目的移植中需要用到一些头文件,可以在contrib-1.4.1中找到。
无操作系统的移植可以参考原子的
我是用的PHY芯片的83848,用的是RMII的模式工作的。
有操作系统的移植
先来看看添加的文件
需要修改的文件
修改sys_arch.c文件
#include "lwip/debug.h"
#include "lwip/def.h"
#include "lwip/sys.h"
#include "lwip/mem.h"
#include "lwip/mem.h"
#include "arch/sys_arch.h"
#define SYS_ARCH_BLOCKING_TICKTIMEOUT ((portTickType)10000)
/* This is the number of threads that can be started with sys_thread_new() */
#define SYS_THREAD_MAX 6
/* Structure associating a thread to a struct sys_timeouts */
/* 将线程与结构sys_timeouts关联的结构 */
struct TimeoutlistPerThread {
sys_thread_t pid; /* The thread id */
};
/* Thread & struct sys_timeouts association statically allocated per thread.
Note: SYS_THREAD_MAX is the max number of thread created by sys_thread_new()
that can run simultaneously; it is defined in conf_lwip_threads.h. */
static struct TimeoutlistPerThread Threads_TimeoutsList[SYS_THREAD_MAX];
/* Number of active threads. */
static u16_t NbActiveThreads = 0;
/**
* \brief Initialize the sys_arch layer.
*/
void sys_init(void)
{
int i;
/* Initialize the the per-thread sys_timeouts structures
make sure there are no valid pids in the list */
for (i = 0; i < SYS_THREAD_MAX; i++) {
Threads_TimeoutsList[i].pid = 0;
}
/* Keep track of how many threads have been created */
NbActiveThreads = 0;
}
/**
* \brief Creates and returns a new semaphore.
*
* \param sem Pointer to the semaphore.
* \param count Initial state of the semaphore.
*
* \return ERR_OK for OK, other value indicates error.
*/
err_t sys_sem_new(sys_sem_t *sem, u8_t count)
{
err_t err_sem = ERR_MEM;
/* Sanity check */
if (sem != NULL) {
portENTER_CRITICAL();
vSemaphoreCreateBinary( *sem );
if (*sem != SYS_SEM_NULL) {
#if SYS_STATS
lwip_stats.sys.sem.used++;
if (lwip_stats.sys.sem.used > lwip_stats.sys.sem.max) {
lwip_stats.sys.sem.max = lwip_stats.sys.sem.used;
}
#endif /* SYS_STATS */
if (0 == count) { /* Means we want the sem to be
unavailable at init state. */
xSemaphoreTake( *sem, 1);
}
err_sem = ERR_OK;
}
portEXIT_CRITICAL();
}
return err_sem;
}
/**
* \brief Frees a semaphore created by sys_sem_new.
*
* \param sem Pointer to the semaphore.
*/
void sys_sem_free(sys_sem_t *sem)
{
/* Sanity check */
if (sem != NULL) {
if (SYS_SEM_NULL != *sem) {
#if SYS_STATS
lwip_stats.sys.sem.used--;
#endif /* SYS_STATS */
vQueueDelete( *sem );
}
}
}
/**
* \brief Signals (or releases) a semaphore.
*
* \param sem Pointer to the semaphore.
*/
void sys_sem_signal(sys_sem_t *sem)
{
/* Sanity check */
if (sem != NULL) {
xSemaphoreGive( *sem );
}
}
/**
* \brief Blocks the thread while waiting for the semaphore to be signaled.
* Note that there is another function sys_sem_wait in sys.c, but it is a wrapper
* for the sys_arch_sem_wait function. Please note that it is important for the
* semaphores to return an accurate count of elapsed milliseconds, since they are
* used to schedule timers in lwIP.
*
* \param sem Pointer to the semaphore.
* \param timeout The timeout parameter specifies how many milliseconds the
* function should block before returning; if the function times out, it should
* return SYS_ARCH_TIMEOUT. If timeout=0, then the function should block
* indefinitely. If the function acquires the semaphore, it should return how
* many milliseconds expired while waiting for the semaphore.
*
* \return SYS_ARCH_TIMEOUT if times out, ERR_MEM for semaphore erro otherwise
* return the milliseconds expired while waiting for the semaphore.
*/
u32_t sys_arch_sem_wait(sys_sem_t *sem, u32_t timeout)
{
portTickType TickStart;
portTickType TickStop;
/* Express the timeout in OS tick. */
portTickType TickElapsed = (portTickType)(timeout / portTICK_RATE_MS);
/* Sanity check */
if (sem != NULL) {
if (timeout && !TickElapsed) {
TickElapsed = 1; /* Wait at least one tick */
}
if (0 == TickElapsed) {
TickStart = xTaskGetTickCount();
/* If timeout=0, then the function should block indefinitely */
while (pdFALSE == xSemaphoreTake( *sem, SYS_ARCH_BLOCKING_TICKTIMEOUT )) {
}
} else {
TickStart = xTaskGetTickCount();
if (pdFALSE == xSemaphoreTake( *sem, TickElapsed )) {
/* if the function times out, it should return SYS_ARCH_TIMEOUT */
return(SYS_ARCH_TIMEOUT);
}
}
/* If the function acquires the semaphore, it should return how
many milliseconds expired while waiting for the semaphore */
TickStop = xTaskGetTickCount();
/* Take care of wrap-around */
if (TickStop >= TickStart) {
TickElapsed = TickStop - TickStart;
} else {
TickElapsed = portMAX_DELAY - TickStart + TickStop;
}
return(TickElapsed * portTICK_RATE_MS);
} else {
return (u32_t)ERR_MEM;
}
}
#ifndef sys_sem_valid
/**
* \brief Check if a sempahore is valid/allocated.
*
* \param sem Pointer to the semaphore.
*
* \return Semaphore number on valid, 0 for invalid.
*/
int sys_sem_valid(sys_sem_t *sem)
{
return ((int)(*sem));
}
#endif
#ifndef sys_sem_set_invalid
/**
* \brief Set a semaphore invalid.
*
* \param sem Pointer to the semaphore.
*/
void sys_sem_set_invalid(sys_sem_t *sem)
{
*sem = NULL;
}
#endif
/**
* \brief Creates an empty mailbox for maximum "size" elements. Elements stored
* in mailboxes are pointers.
*
* \param mBoxNew Pointer to the new mailbox.
* \param size Maximum "size" elements.
*
* \return ERR_OK if successfull or ERR_MEM on error.
*/
err_t sys_mbox_new(sys_mbox_t *mBoxNew, int size )
{
err_t err_mbox = ERR_MEM;
/* Sanity check */
if (mBoxNew != NULL) {
*mBoxNew = xQueueCreate( size, sizeof(void *));
#if SYS_STATS
if (SYS_MBOX_NULL != *mBoxNew) {
lwip_stats.sys.mbox.used++;
if (lwip_stats.sys.mbox.used > lwip_stats.sys.mbox.max) {
lwip_stats.sys.mbox.max = lwip_stats.sys.mbox.used;
}
}
#endif /* SYS_STATS */
err_mbox = ERR_OK;
}
return(err_mbox);
}
/**
* \brief Deallocates a mailbox.
* If there are messages still present in the mailbox when the mailbox is
* deallocated, it is an indication of a programming error in lwIP and the
* developer should be notified.
*
* \param mbox Pointer to the new mailbox.
*/
void sys_mbox_free(sys_mbox_t *mbox)
{
/* Sanity check */
if (mbox != NULL) {
if (SYS_MBOX_NULL != *mbox) {
#if SYS_STATS
lwip_stats.sys.mbox.used--;
#endif /* SYS_STATS */
vQueueDelete( *mbox );
}
}
}
/**
* \brief Posts the "msg" to the mailbox. This function have to block until the
* "msg" is really posted.
*
* \param mbox Pointer to the mailbox.
* \param msg Pointer to the message to be post.
*/
void sys_mbox_post(sys_mbox_t *mbox, void *msg)
{
/* Sanit check */
if (mbox != NULL) {
while (pdTRUE != xQueueSend( *mbox, &msg, SYS_ARCH_BLOCKING_TICKTIMEOUT )) {
}
}
}
/**
* \brief Try to posts the "msg" to the mailbox.
*
* \param mbox Pointer to the mailbox.
* \param msg Pointer to the message to be post.
*
* \return ERR_MEM if the mailbox is full otherwise ERR_OK if the "msg" is posted.
*/
err_t sys_mbox_trypost(sys_mbox_t *mbox, void *msg)
{
err_t err_mbox = ERR_MEM;
/* Sanity check */
if (mbox != NULL) {
if (errQUEUE_FULL != xQueueSend( *mbox, &msg, 0 )) {
err_mbox = ERR_OK;
}
}
return (err_mbox);
}
/**
* \brief Blocks the thread until a message arrives in the mailbox, but does not
* block the thread longer than "timeout" milliseconds (similar to the
* sys_arch_sem_wait() function).
*
* \param mbox Pointer to the mailbox.
* \param msg A result parameter that is set by the function (i.e., by doing
* "*msg = ptr"). The "msg" parameter maybe NULL to indicate that the message
* should be dropped.
* \timeout 0 indicates the thread should be blocked until a message arrives.
*
* \return Number of milliseconds spent waiting or SYS_ARCH_TIMEOUT if there was
* a timeout. Or ERR_MEM if invalid pointer to message box.
*/
u32_t sys_arch_mbox_fetch(sys_mbox_t *mbox, void **msg, u32_t timeout)
{
portTickType TickStart;
portTickType TickStop;
void *tempoptr;
/* Express the timeout in OS tick. */
portTickType TickElapsed = (portTickType)(timeout / portTICK_RATE_MS);
/* Sanity check */
if (mbox != NULL) {
if (timeout && !TickElapsed) {
TickElapsed = 1; /* Wait at least one tick */
}
if (msg == NULL) {
msg = &tempoptr;
}
/* NOTE: INCLUDE_xTaskGetSchedulerState must be set to 1 in
* FreeRTOSConfig.h for xTaskGetTickCount() to be available */
if (0 == TickElapsed) {
TickStart = xTaskGetTickCount();
/* If "timeout" is 0, the thread should be blocked until
* a message arrives */
while (pdFALSE == xQueueReceive( *mbox, &(*msg),
SYS_ARCH_BLOCKING_TICKTIMEOUT )) {
}
} else {
TickStart = xTaskGetTickCount();
if (pdFALSE == xQueueReceive( *mbox, &(*msg), TickElapsed )) {
*msg = NULL;
/* if the function times out, it should return
* SYS_ARCH_TIMEOUT. */
return(SYS_ARCH_TIMEOUT);
}
}
/* If the function gets a msg, it should return the number of ms
* spent waiting. */
TickStop = xTaskGetTickCount();
/* Take care of wrap-around. */
if (TickStop >= TickStart) {
TickElapsed = TickStop - TickStart;
} else {
TickElapsed = portMAX_DELAY - TickStart + TickStop;
}
return(TickElapsed * portTICK_RATE_MS);
} else {
return (u32_t)ERR_MEM;
}
}
/**
* \brief This is similar to sys_arch_mbox_fetch, however if a message is not
* present in the mailbox, it immediately returns with the code SYS_MBOX_EMPTY.
* On success 0 is returned.
*
* \param mbox Pointer to the mailbox.
* \param msg A result parameter that is set by the function (i.e., by doing
* "*msg = ptr"). The "msg" parameter maybe NULL to indicate that the message
* should be dropped.
*
* \return Number of milliseconds spent waiting or SYS_ARCH_TIMEOUT if there was
* a timeout. Or ERR_MEM if invalid pointer to message box.
*/
u32_t sys_arch_mbox_tryfetch(sys_mbox_t *mbox, void **msg)
{
void *tempoptr;
/* Sanity check */
if (mbox != NULL) {
if (msg == NULL) {
msg = &tempoptr;
}
if (pdFALSE == xQueueReceive( *mbox, &(*msg), 0 )) {
/* if a message is not present in the mailbox, it
* immediately returns with */
/* the code SYS_MBOX_EMPTY. */
return(SYS_MBOX_EMPTY);
}
/* On success 0 is returned. */
return(0);
} else {
return(SYS_MBOX_EMPTY);
}
}
#ifndef sys_mbox_valid
/**
* \brief Check if an mbox is valid/allocated.
*
* \param mbox Pointer to the mailbox.
*
* \return Mailbox for valid, 0 for invalid.
*/
int sys_mbox_valid(sys_mbox_t *mbox)
{
return ((int)(*mbox));
}
#endif
#ifndef sys_mbox_set_invalid
/**
* \brief Set an mbox invalid.
*
* \param mbox Pointer to the mailbox.
*/
void sys_mbox_set_invalid(sys_mbox_t *mbox)
{
*mbox = NULL;
}
#endif
/**
* \brief Instantiate a thread for lwIP. Both the id and the priority are
* system dependent.
*
* \param name Pointer to the thread name.
* \param thread Thread function.
* \param arg Argument will be passed into the thread().
* \param stacksize Stack size of the thread.
* \param prio Thread priority.
*
* \return The id of the new thread.
*/
sys_thread_t sys_thread_new(const char *name, lwip_thread_fn thread, void *arg,
int stacksize, int prio)
{
sys_thread_t newthread;
portBASE_TYPE result;
SYS_ARCH_DECL_PROTECT(protectionLevel);
result = xTaskCreate( thread, (const portCHAR *)name, stacksize, arg,
prio, &newthread );
/* Need to protect this -- preemption here could be a problem! */
SYS_ARCH_PROTECT(protectionLevel);
if (pdPASS == result) {
/* For each task created, store the task handle (pid) in the
* timers array. */
/* This scheme doesn't allow for threads to be deleted */
Threads_TimeoutsList[NbActiveThreads++].pid = newthread;
} else {
newthread = NULL;
}
SYS_ARCH_UNPROTECT(protectionLevel);
return(newthread);
}
/* Mutex functions: */
/** Define LWIP_COMPAT_MUTEX if the port has no mutexes and binary semaphores
* should be used instead */
#if !LWIP_COMPAT_MUTEX
/**
* \brief Create a new mutex.
*
* \param mutex Pointer to the mutex to create.
*
* \return A new mutex.
*/
err_t sys_mutex_new(sys_mutex_t *mutex)
{
}
/**
* \brief Lock a mutex.
*
* \param mutex the mutex to lock.
*/
void sys_mutex_lock(sys_mutex_t *mutex)
{
}
/**
* \brief Unlock a mutex.
*
* \param mutex the mutex to unlock.
*/
void sys_mutex_unlock(sys_mutex_t *mutex)
{
}
/**
* \brief Delete a semaphore.
*
* \param mutex the mutex to delete.
*/
void sys_mutex_free(sys_mutex_t *mutex)
{
}
#ifndef sys_mutex_valid
/**
* \brief Check if a mutex is valid/allocated.
*
* \param mutex Pointer to the mutex.
*
* \return Valid mutex number or 0 for invalid.
*/
int sys_mutex_valid(sys_mutex_t *mutex)
{
return ((int)(*mutex));
}
#endif
#ifndef sys_mutex_set_invalid
/**
* \brief Set a mutex invalid so that sys_mutex_valid returns 0.
*
* \param mutex Pointer to the mutex.
*/
void sys_mutex_set_invalid(sys_mutex_t *mutex)
{
*mutex = NULL;
}
#endif
#endif
/* This optional function does a "fast" critical region protection and returns
* the previous protection level. This function is only called during very short
* critical regions. An embedded system which supports ISR-based drivers might
* want to implement this function by disabling interrupts. Task-based systems
* might want to implement this by using a mutex or disabling tasking. This
* function should support recursive calls from the same task or interrupt. In
* other words, sys_arch_protect() could be called while already protected. In
* that case the return value indicates that it is already protected.*/
extern volatile unsigned portLONG ulCriticalNesting;
/**
* \brief Protect the system.
*
* \return 1 on success.
*/
sys_prot_t sys_arch_protect(void)
{
vPortEnterCritical();
return 1; /* Not used */
}
/**
* \brief Unprotect the system.
*
* \param pval Protect value.
*/
void sys_arch_unprotect(sys_prot_t pval)
{
vPortExitCritical();
}
/**
* \brief updata the system time.
*
* \param null.
*/
extern u32_t LWipTime;
u32_t sys_now(void)
{
return LWipTime;
}
ethernetif.c
#include "lwip/opt.h"
#include "lwip/def.h"
#include "lwip/mem.h"
#include "lwip/pbuf.h"
#include 修改lwipopts.h文件
#ifndef __LWIPOPTS_H__
#define __LWIPOPTS_H__
#define SYS_LIGHTWEIGHT_PROT 0 //关保护
//NO_SYS==1:不使用操作系统
#define NO_SYS 0 //1:不使用UCOS操作系统 0:使用操作系统
#ifndef CHECKSUM_GEN_ICMP
#define CHECKSUM_GEN_ICMP 0 //我们使用硬件校验,关闭软件校验
#endif
//使用4字节对齐模式
#define MEM_ALIGNMENT 4
//MEM_SIZE:heap内存的大小,如果在应用中有大量数据发送的话这个值最好设置大一点
#define MEM_SIZE (5*1024)//16000 //内存堆大小
//MEMP_NUM_PBUF:memp结构的pbuf数量,如果应用从ROM或者静态存储区发送大量数据时,这个值应该设置大一点
#define MEMP_NUM_PBUF 10
//MEMP_NUM_UDP_PCB:UDP协议控制块(PCB)数量.每个活动的UDP"连接"需要一个PCB.
#define MEMP_NUM_UDP_PCB 6
//MEMP_NUM_TCP_PCB:同时建立激活的TCP数量
#define MEMP_NUM_TCP_PCB 10
//MEMP_NUM_TCP_PCB_LISTEN:能够监听的TCP连接数量
#define MEMP_NUM_TCP_PCB_LISTEN 6
//MEMP_NUM_TCP_SEG:最多同时在队列中的TCP段数量
#define MEMP_NUM_TCP_SEG 15
//MEMP_NUM_SYS_TIMEOUT:能够同时激活的timeout个数
#define MEMP_NUM_SYS_TIMEOUT 8
/* ---------- Pbuf选项---------- */
//PBUF_POOL_SIZE:pbuf内存池个数.
#define PBUF_POOL_SIZE 20
//PBUF_POOL_BUFSIZE:每个pbuf内存池大小.
#define PBUF_POOL_BUFSIZE 512
/* ---------- TCP选项---------- */
#define LWIP_TCP 1 //为1是使用TCP
#define TCP_TTL 255//生存时间
/*当TCP的数据段超出队列时的控制位,当设备的内存过小的时候此项应为0*/
#define TCP_QUEUE_OOSEQ 0
//最大TCP分段
#define TCP_MSS (1500 - 40) //TCP_MSS = (MTU - IP报头大小 - TCP报头大小
//TCP发送缓冲区大小(bytes).
#define TCP_SND_BUF (4*TCP_MSS)
//TCP_SND_QUEUELEN: TCP发送缓冲区大小(pbuf).这个值最小为(2 * TCP_SND_BUF/TCP_MSS)
#define TCP_SND_QUEUELEN (2* TCP_SND_BUF/TCP_MSS)
//TCP发送窗口
#define TCP_WND (2*TCP_MSS)
/* ---------- ICMP选项---------- */
#define LWIP_ICMP 1 //使用ICMP协议
/* ---------- DHCP选项---------- */
//当使用DHCP时此位应该为1,LwIP 0.5.1版本中没有DHCP服务.
#define LWIP_DHCP 1
/* ---------- UDP选项 ---------- */
#define LWIP_UDP 1 //使用UDP服务
#define UDP_TTL 255 //UDP数据包生存时间
/* ---------- Statistics options ---------- */
#define LWIP_STATS 0
#define LWIP_PROVIDE_ERRNO 1
//STM32F4x7允许通过硬件识别和计算IP,UDP和ICMP的帧校验和
#define CHECKSUM_BY_HARDWARE //定义CHECKSUM_BY_HARDWARE,使用硬件帧校验
#ifdef CHECKSUM_BY_HARDWARE
//CHECKSUM_GEN_IP==0: 硬件生成IP数据包的帧校验和
#define CHECKSUM_GEN_IP 0
//CHECKSUM_GEN_UDP==0: 硬件生成UDP数据包的帧校验和
#define CHECKSUM_GEN_UDP 0
//CHECKSUM_GEN_TCP==0: 硬件生成TCP数据包的帧校验和
#define CHECKSUM_GEN_TCP 0
//CHECKSUM_CHECK_IP==0: 硬件检查输入的IP数据包帧校验和
#define CHECKSUM_CHECK_IP 0
//CHECKSUM_CHECK_UDP==0: 硬件检查输入的UDP数据包帧校验和
#define CHECKSUM_CHECK_UDP 0
//CHECKSUM_CHECK_TCP==0: 硬件检查输入的TCP数据包帧校验和
#define CHECKSUM_CHECK_TCP 0
#else
//CHECKSUM_GEN_IP==1: 软件生成IP数据包帧校验和
#define CHECKSUM_GEN_IP 1
// CHECKSUM_GEN_UDP==1: 软件生成UDOP数据包帧校验和
#define CHECKSUM_GEN_UDP 1
//CHECKSUM_GEN_TCP==1: 软件生成TCP数据包帧校验和
#define CHECKSUM_GEN_TCP 1
// CHECKSUM_CHECK_IP==1: 软件检查输入的IP数据包帧校验和
#define CHECKSUM_CHECK_IP 1
// CHECKSUM_CHECK_UDP==1: 软件检查输入的UDP数据包帧校验和
#define CHECKSUM_CHECK_UDP 1
//CHECKSUM_CHECK_TCP==1: 软件检查输入的TCP数据包帧校验和
#define CHECKSUM_CHECK_TCP 1
#endif
/*
---------------------------------
---------- OS options ----------
---------------------------------
*/
#define TCPIP_THREAD_STACKSIZE 1000
#define TCPIP_MBOX_SIZE 5
#define DEFAULT_UDP_RECVMBOX_SIZE 2000
#define DEFAULT_TCP_RECVMBOX_SIZE 2000
#define DEFAULT_ACCEPTMBOX_SIZE 2000
#define DEFAULT_THREAD_STACKSIZE 500
#define TCPIP_THREAD_PRIO (configMAX_PRIORITIES - 2)
/*
----------------------------------------------
---------- SequentialAPI选项----------
----------------------------------------------
*/
//LWIP_NETCONN==1:使能NETCON函数(要求使用api_lib.c)
#define LWIP_NETCONN 1
/*
------------------------------------
---------- Socket API选项----------
------------------------------------
*/
//LWIP_SOCKET==1:使能Socket API(要求使用sockets.c)
#define LWIP_SOCKET 1
#define LWIP_COMPAT_MUTEX 1
#define LWIP_SO_RCVTIMEO 1 //通过定义LWIP_SO_RCVTIMEO使能netconn结构体中recv_timeout,使用recv_timeout可以避免阻塞线程
/*
----------------------------------------
---------- Lwip调试选项----------
----------------------------------------
*/
//#define LWIP_DEBUG 1 //开启DEBUG选项
//#define ICMP_DEBUG 1 //开启/关闭ICMPdebug
#if 0
#define U8_F "c"
#define S8_F "c"
#define X8_F "x"
#define U16_F "u"
#define S16_F "d"
#define X16_F "x"
#define U32_F "u"
#define S32_F "d"
#define X32_F "x"
//extern void u2_printf(const char *pcString, ...);
extern void UARTprintf(const char *pcString, ...);
//#define LWIP_PLATFORM_DIAG(x) {u2_printf x;}
//#define LWIP_DEBUG
#define LWIP_DBG_MIN_LEVEL LWIP_DBG_LEVEL_OFF
//#define LWIP_DBG_MIN_LEVEL LWIP_DBG_LEVEL_WARNING
//#define LWIP_DBG_MIN_LEVEL LWIP_DBG_LEVEL_SERIOUS
//#define LWIP_DBG_MIN_LEVEL LWIP_DBG_LEVEL_SEVERE
//#define LWIP_DBG_TYPES_ON LWIP_DBG_ON
//#define LWIP_DBG_TYPES_ON (LWIP_DBG_ON|LWIP_DBG_TRACE|LWIP_DBG_STATE|LWIP_DBG_FRESH)
//#define ETHARP_DEBUG LWIP_DBG_ON
//#define NETIF_DEBUG LWIP_DBG_ON
//#define PBUF_DEBUG LWIP_DBG_ON
//#define API_LIB_DEBUG LWIP_DBG_ON
//#define API_MSG_DEBUG LWIP_DBG_ON
//#define SOCKETS_DEBUG LWIP_DBG_ON
//#define ICMP_DEBUG LWIP_DBG_ON
//#define IGMP_DEBUG LWIP_DBG_ON
//#define INET_DEBUG LWIP_DBG_ON
#define IP_DEBUG LWIP_DBG_ON
//#define IP_REASS_DEBUG LWIP_DBG_ON
//#define RAW_DEBUG LWIP_DBG_ON
//#define MEM_DEBUG LWIP_DBG_ON
//#define MEMP_DEBUG LWIP_DBG_ON
//#define SYS_DEBUG LWIP_DBG_ON
#define TCP_DEBUG LWIP_DBG_ON
//#define TCP_INPUT_DEBUG LWIP_DBG_ON
//#define TCP_FR_DEBUG LWIP_DBG_ON
//#define TCP_RTO_DEBUG LWIP_DBG_ON
//#define TCP_CWND_DEBUG LWIP_DBG_ON
//#define TCP_WND_DEBUG LWIP_DBG_ON
#define TCP_OUTPUT_DEBUG LWIP_DBG_ON
//#define TCP_RST_DEBUG LWIP_DBG_ON
//#define TCP_QLEN_DEBUG LWIP_DBG_ON
//#define UDP_DEBUG LWIP_DBG_ON
//#define TCPIP_DEBUG LWIP_DBG_ON
//#define PPP_DEBUG LWIP_DBG_ON
//#define SLIP_DEBUG LWIP_DBG_ON
//#define DHCP_DEBUG LWIP_DBG_ON
//#define AUTOIP_DEBUG LWIP_DBG_ON
//#define SNMP_MSG_DEBUG LWIP_DBG_ON
//#define SNMP_MIB_DEBUG LWIP_DBG_ON
//#define DNS_DEBUG LWIP_DBG_ON
#endif
#endif /* __LWIPOPTS_H__ */
主要的几个文件我罗列一下,不然太长了,还有为毛win10的edge支持的这么差,还要找个游览器才能写.
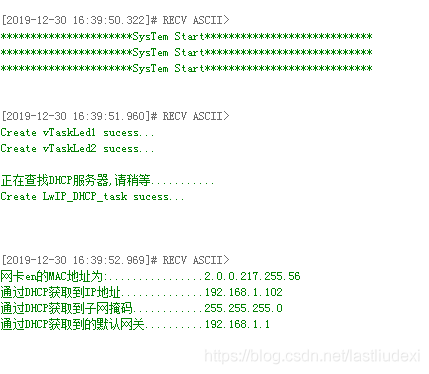
上一下效果图
