图像颜色空间转换—— Python 实现
介绍
在介绍颜色空间转换之前,先来介绍一下什么是颜色空间。
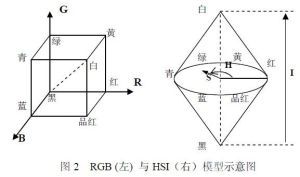
颜色空间指的是组织颜色的特定方式。我们知道,一种颜色可以由 红、绿、蓝 三种颜色组合出来,这里的 红、绿、蓝 三原色就是一种颜色模型。而这种由三原色组织颜色的方法就是一种颜色空间。任何一种颜色,在颜色空间中,都可以通过一个函数表示出来,在 RGB 模型中,函数的参数就是 R、G、B 三原色。
当然,同一种颜色,在不同的颜色空间中,由于侧重点不同,表现出来的色彩是不一样的。通常的图片是采用的 RGB 三原色来表示的,所以,现在,我们的目的就是将同一幅图片转换成用其他颜色空间来表示。
这篇文章中一共有四张颜色空间的转换:
- RGB -> YIQ
- RGB -> HSI
- RGB -> YCbCr
- RGB -> XYZ
颜色空间转换的算法及流程
RGB -> YIQ :
先来介绍一下 YIQ 这个颜色空间,百度百科:
YIQ色彩空间属于NTSC系统。这里Y是指颜色的明视度,即亮度。其实Y就是图像灰度值,I和Q都指的是指色调,即描述图像色彩与饱和度的属性。YIQ颜色空间具有能将图像中的亮度分量分离提取出来的优点,并且YIQ颜色空间与RGB颜色空间之间是线性变换的关系,计算量小,聚类特性也比较好,可以适应光照强度不断变化的场合。
首先,需要将读取的 R,G,B 分量进行归一化,归一到 [ 0 , 1 ] [0,1] [0,1] 区间,然后再利用下面的公式进行计算:
[ Y I Q ] = [ 0.299 0.587 0.114 0.596 − 0.274 − 0.322 0.211 − 0.523 0.312 ] [ R G B ] \begin{bmatrix} Y \\ I \\ Q \\ \end{bmatrix} = \begin{bmatrix} 0.299 & 0.587 & 0.114 \\ 0.596 & -0.274 & -0.322 \\ 0.211 & -0.523 & 0.312 \\ \end{bmatrix} \begin{bmatrix} R \\ G \\ B \\ \end{bmatrix} ⎣⎡YIQ⎦⎤=⎣⎡0.2990.5960.2110.587−0.274−0.5230.114−0.3220.312⎦⎤⎣⎡RGB⎦⎤
计算完成后,需要将其标准化,即转成 [ 0 , 255 ] [0,255] [0,255] 区间内。标准化的时候,要将I 和 Q 分量+128。不同的标准可能数值会有一些差异,但不会差别很大。
RGB -> HSI :
HSI 颜色模型介绍:
HSI〔Hue-Saturation-Intensity(Lightness),HSI或HSL〕颜色模型用H、S、I三参数描述颜色特性,其中H定义颜色的波长,称为色调;S表示颜色的深浅程度,称为饱和度;I表示强度或亮度。在HSI颜色模型的双六棱锥表示,I是强度轴,色调H的角度范围为[0,2π],其中,纯红色的角度为0,纯绿色的角度为2π/3,纯蓝色的角度为4π/3。
RGB 转成 HSI 稍微复杂一些,具体步骤如下:
首先,需要将 R、G、B 三种颜色通道进行转换:
r = R R + G + B g = G R + G + B b = B R + G + B r = \frac{R}{R + G + B} \ \ \ \ g = \frac{G}{R + G + B} \ \ \ \ b = \frac{B}{R + G + B} r=R+G+BR g=R+G+BG b=R+G+BB
然后再进行转换,其中 H 维度需要进行一次判断,具体公式如下:
h = cos − 1 ( 0.5 ⋅ [ ( r − g ) + ( r − b ) ] [ ( r − g ) 2 + ( r − b ) ( g − b ) ] 1 2 ) h ∈ [ 0 , π ] f o r b ≤ g h = \cos^{-1} \left( \frac{0.5\cdot \left[ \left(r - g\right) + \left(r - b\right)\right] } {\left[\left(r - g\right)^2 + \left(r - b \right) \left(g - b \right) \right]^{\frac12}} \right) \ \ \ \ h \in [0, \pi] \ for \ \ b \leq g h=cos−1⎝⎜⎛[(r−g)2+(r−b)(g−b)]210.5⋅[(r−g)+(r−b)]⎠⎟⎞ h∈[0,π] for b≤g
h = 2 π − cos − 1 ( 0.5 ⋅ [ ( r − g ) + ( r − b ) ] [ ( r − g ) 2 + ( r − b ) ( g − b ) ] 1 2 ) h ∈ [ 0 , π ] f o r b > g h = 2\pi - \cos^{-1} \left( \frac{0.5\cdot \left[ \left(r - g\right) + \left(r - b\right)\right] } {\left[\left(r - g\right)^2 + \left(r - b \right) \left(g - b \right) \right]^{\frac12}} \right) \ \ \ \ h \in [0, \pi] \ for \ \ b > g h=2π−cos−1⎝⎜⎛[(r−g)2+(r−b)(g−b)]210.5⋅[(r−g)+(r−b)]⎠⎟⎞ h∈[0,π] for b>g
s = 1 − 3 ⋅ m i n ( r , g , b ) s ∈ [ 0 , 1 ] s = 1 - 3 \cdot min(r, g, b) \ \ \ s \in [0,1] s=1−3⋅min(r,g,b) s∈[0,1]
i = R + G + B 3 ⋅ 255 i ∈ [ 0 , 1 ] i = \frac{R + G + B} { 3 \cdot 255} \ \ \ i \in [0,1] i=3⋅255R+G+B i∈[0,1]
计算完成后,再进行转换,转换公式如下:
H = h × 180 π H = \frac{h \times 180} {\pi} H=πh×180
S = s × 100 S = s \times 100 S=s×100
I = i × 255 I = i \times 255 I=i×255
这样就算转换成功了,计算稍微复杂一点但也不算太麻烦。最后,记得将 H 维度截断成 [ 0 , 255 ] [0,255] [0,255] 区间内。
RGB -> YCbCr :
先来看百度百科的介绍:
YCbCr或Y’CbCr有的时候会被写作:YCBCR或是Y’CBCR,是色彩空间的一种,通常会用于影片中的影像连续处理,或是数字摄影系统中。Y’为颜色的亮度(luma)成分、而CB和CR则为蓝色和红色的浓度偏移量成份。Y’和Y是不同的,而Y就是所谓的流明(luminance),表示光的浓度且为非线性,使用伽马修正(gamma correction)编码处理。
这个转换公式比较简单,直接乘上一个转换矩阵再转换一下就可以了:
[ Y C b C r ] = [ 0 128 128 ] + [ 0.299 0.587 0.114 − 0.169 − 0.331 0.5 0.5 − 0.419 − 0.081 ] [ R G B ] \begin{bmatrix} Y \\ Cb \\ Cr \\ \end{bmatrix} = \begin{bmatrix} 0 \\ 128 \\ 128 \\ \end{bmatrix} + \begin{bmatrix} 0.299 & 0.587 & 0.114 \\ -0.169 & -0.331 & 0.5 \\ 0.5 & -0.419 & -0.081 \\ \end{bmatrix} \begin{bmatrix} R \\ G \\ B \\ \end{bmatrix} ⎣⎡YCbCr⎦⎤=⎣⎡0128128⎦⎤+⎣⎡0.299−0.1690.50.587−0.331−0.4190.1140.5−0.081⎦⎤⎣⎡RGB⎦⎤
RGB -> XYZ :
还是先来看看百度百科:
1931CIE-XYZ系统,就是在RGB系统的基础上,用数学方法,选用三个理想的原色来代替实际的三原色,从而将CIE-RGB系统中的光谱三刺激值和色度坐标r、g、b均变为正值。
这个跟 RGB 空间比较相似,计算也比较简单,直接乘上一个转换矩阵,转换公式如下:
[ X Y Z ] = [ 0.412453 0.357580 0.180423 0.212671 0.715160 0.072169 0.019334 0.119193 0.950227 ] [ R G B ] \begin{bmatrix} X \\ Y \\ Z \\ \end{bmatrix} = \begin{bmatrix} 0.412453 & 0.357580 & 0.180423 \\ 0.212671 & 0.715160 & 0.072169 \\ 0.019334 & 0.119193 & 0.950227 \\ \end{bmatrix} \begin{bmatrix} R \\ G \\ B \\ \end{bmatrix} ⎣⎡XYZ⎦⎤=⎣⎡0.4124530.2126710.0193340.3575800.7151600.1191930.1804230.0721690.950227⎦⎤⎣⎡RGB⎦⎤
实验结果
原始图片 :

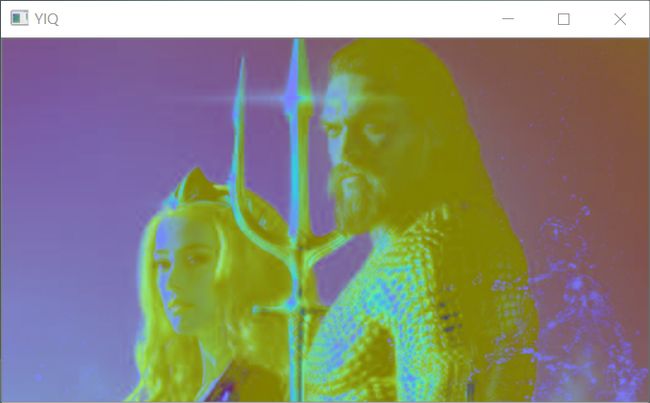
RGB -> YIQ :
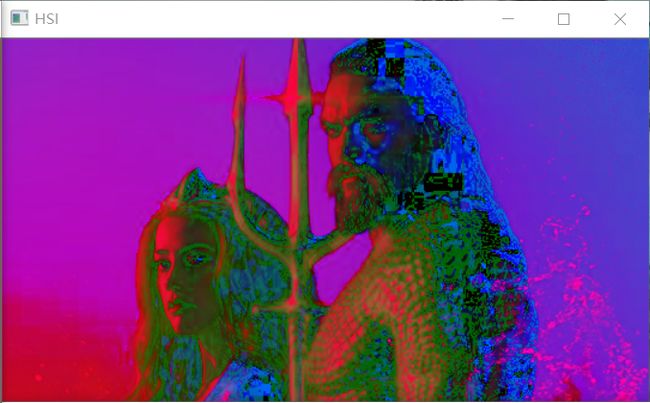
RGB -> HSI :
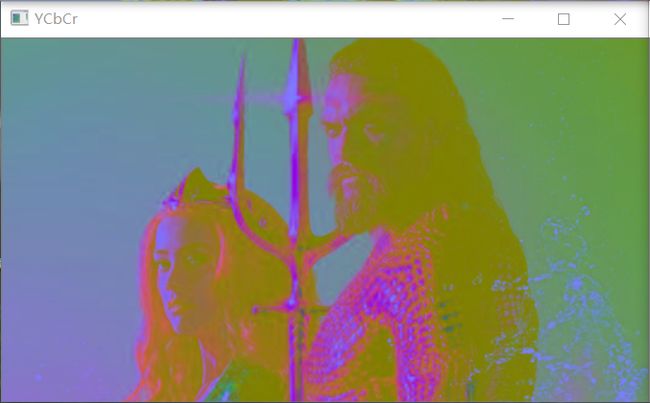
RGB -> YCbCr :
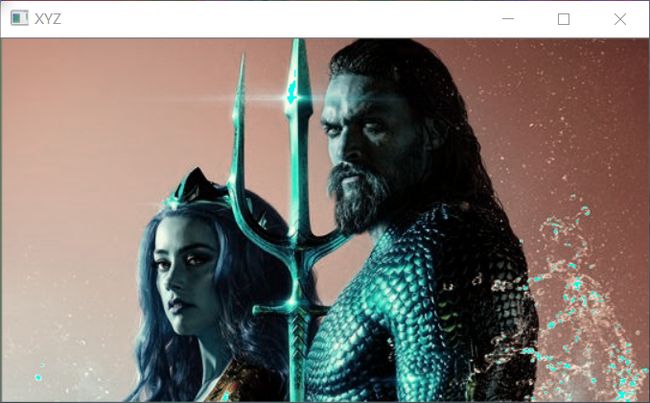
RGB -> XYZ :
Python 代码
# -*- coding: UTF-8 -*-
import numpy as np
import math
# YIQ 变换
def imgTranYIQ(r, g, b) :
matrix_tran = np.array([[0.299, 0.587, 0.114], \
[0.596, -0.274, -0.322], \
[0.211, -0.523, 0.312]])
Y = []
I = []
Q = []
for row in range(len(r)) :
Y_row = []
I_row = []
Q_row = []
for col in range(len(r[row])) :
Y_row.append(matrix_tran[0][0] * r[row][col] + matrix_tran[0][1] * g[row][col] + matrix_tran[0][2] * b[row][col])
I_row.append(matrix_tran[1][0] * r[row][col] + matrix_tran[1][1] * g[row][col] + matrix_tran[1][2] * b[row][col])
Q_row.append(matrix_tran[2][0] * r[row][col] + matrix_tran[2][1] * g[row][col] + matrix_tran[2][2] * b[row][col])
Y.append(Y_row)
I.append(I_row)
Q.append(Q_row)
# 标准化
return Y, I, Q
# HSI 变换
def imgTranHSI(R, G, B) :
# 变化后的 g, b, r
g = []
b = []
r = []
for row in range(len(R)) :
r_row = []
g_row = []
b_row = []
for col in range(len(R[row])) :
g_value = G[row][col]
b_value = B[row][col]
r_value = R[row][col]
rgb_sum = g_value + b_value + r_value
if rgb_sum == 0 :
b_row.append(0)
g_row.append(0)
r_row.append(0)
else :
b_row.append(b_value / rgb_sum)
g_row.append(g_value / rgb_sum)
r_row.append(r_value / rgb_sum)
b.append(b_row)
g.append(g_row)
r.append(r_row)
# 计算 H、S、I三维通道
H = []
S = []
I = []
for row in range(len(r)) :
H_row = []
S_row = []
I_row = []
for col in range(len(r[row])) :
r_value = r[row][col]
g_value = g[row][col]
b_value = b[row][col]
# 计算 H_row_value
sqrt_value = (r_value - g_value) * (r_value - g_value) + (r_value - b_value) * (g_value - b_value)
sqrt_value = math.sqrt(sqrt_value)
son_value = 0.5 * (r_value - g_value + r_value - b_value)
if sqrt_value == 0 :
H_row_value = 0
else :
acos_value = son_value / sqrt_value
if acos_value > 1 :
acos_value = 1
elif acos_value < -1 :
acos_value = -1
H_row_value = math.acos(acos_value)
if b[row][col] <= g[row][col] :
H_row.append(H_row_value)
else :
H_row.append(math.pi * 2 - H_row_value)
# 存储 S_row、I_row
S_row.append(1 - 3 * min(r_value, g_value, b_value))
I_row.append((R[row][col] + G[row][col] + B[row][col]) / (3 * 255))
H.append(H_row)
S.append(S_row)
I.append(I_row)
return H, S, I
# YCbCr 变换
def imgTranYCbCr(R, G, B) :
matrix_tran = np.array([[0.299, 0.587, 0.114], \
[-0.169, -0.331, 0.5], \
[0.5, -0.419, -0.081]])
Y = []
Cb = []
Cr = []
for row in range(len(R)) :
Y_row = []
Cb_row = []
Cr_row = []
for col in range(len(R[row])) :
Y_row.append(matrix_tran[0][0] * R[row][col] + matrix_tran[0][1] * G[row][col] + matrix_tran[0][2] * B[row][col])
Cb_row.append(matrix_tran[1][0] * R[row][col] + matrix_tran[1][1] * G[row][col] + matrix_tran[1][2] * B[row][col] + 128)
Cr_row.append(matrix_tran[2][0] * R[row][col] + matrix_tran[2][1] * G[row][col] + matrix_tran[2][2] * B[row][col] + 128)
Y.append(Y_row)
Cb.append(Cb_row)
Cr.append(Cr_row)
# 标准化
return Y, Cb, Cr
# XYZ 变换
def imgTranXYZ(R, G, B) :
matrix_tran = np.array([[0.412453, 0.357580, 0.180423], \
[0.212671, 0.715160, 0.072169], \
[0.019334, 0.119193, 0.950227]])
X = []
Y = []
Z = []
for row in range(len(R)) :
X_row = []
Y_row = []
Z_row = []
for col in range(len(R[row])) :
X_row.append(matrix_tran[0][0] * R[row][col] + matrix_tran[0][1] * G[row][col] + matrix_tran[0][2] * B[row][col])
Y_row.append(matrix_tran[1][0] * R[row][col] + matrix_tran[1][1] * G[row][col] + matrix_tran[1][2] * B[row][col])
Z_row.append(matrix_tran[2][0] * R[row][col] + matrix_tran[2][1] * G[row][col] + matrix_tran[2][2] * B[row][col])
X.append(X_row)
Y.append(Y_row)
Z.append(Z_row)
return X, Y, Z
调用代码:
需要注意的是,这里我读取的是 bmp 文件,由于实验的要求,读取文件是我自己写的。其实可以直接调用 opencv 的库函数 利用 imread() 来读取。
我自己写的读文件的代码在这篇博客里:Python读取并解析 bmp 文件。这里就不细说了。
# -*- coding: UTF-8 -*-
import numpy as np
import sys
from ReadBMPFile import ReadBMPFile
import cv2
import math
import colorSpaceConversion
filePath = sys.argv[1]
# 读取 BMP 文件
bmpFile = ReadBMPFile(filePath)
# R, G, B 三个通道 [0, 255]
R = bmpFile.R
G = bmpFile.G
B = bmpFile.B
# 变化后的 g, b, r [0, 1]
g = []
b = []
r = []
for row in range(len(R)) :
r_row = []
g_row = []
b_row = []
for col in range(len(R[row])) :
r_row.append(R[row][col] / 255)
g_row.append(G[row][col] / 255)
b_row.append(B[row][col] / 255)
r.append(r_row)
g.append(g_row)
b.append(b_row)
# YIQ
y, i, q = colorSpaceConversion.imgTranYIQ(r, g, b)
# 标准化 B、G、R 的值
for row in range(len(y)) :
for col in range(len(y[row])) :
y[row][col] = np.int8(y[row][col] * 255)
i[row][col] = np.int8(i[row][col] * 255 + 128)
q[row][col] = np.int8(q[row][col] * 255 + 128)
y = np.array(y, dtype = np.uint8)
i = np.array(i, dtype = np.uint8)
q = np.array(q, dtype = np.uint8)
merged = cv2.merge([y, i, q]) #合并R、G、B分量 默认顺序为 B、G、R
cv2.imshow("YIQ",merged)
cv2.imwrite(filePath.split("/")[-1].split(".")[0] + "-1160300426-YIQ.bmp", merged)
# HSI
h, s, i = colorSpaceConversion.imgTranHSI(R, G, B)
# 标准化 B、G、R 的值
for row in range(len(h)) :
for col in range(len(h[row])) :
h[row][col] = np.int8(h[row][col] * 180 / math.pi)
s[row][col] = np.int8(s[row][col] * 100)
i[row][col] = np.int8(i[row][col] * 255)
h = np.array(h, dtype = np.uint8)
s = np.array(s, dtype = np.uint8)
i = np.array(i, dtype = np.uint8)
merged = cv2.merge([h, s, i]) #合并R、G、B分量 默认顺序为 B、G、R
cv2.imshow("HSI",merged)
cv2.imwrite(filePath.split("/")[-1].split(".")[0] + "-1160300426-HSI.bmp", merged)
# YCbCr
y, Cb, Cr = colorSpaceConversion.imgTranYCbCr(R, G, B)
y_arr = np.array(y, dtype = np.uint8)
Cb_arr = np.array(Cb, dtype = np.uint8)
Cr_arr = np.array(Cr, dtype = np.uint8)
merged = cv2.merge([y_arr, Cb_arr, Cr_arr]) #合并R、G、B分量 默认顺序为 B、G、R
cv2.imshow("YCbCr",merged)
cv2.imwrite(filePath.split("/")[-1].split(".")[0] + "-1160300426-YCbCr.bmp", merged)
# XYZ
x, y, z = colorSpaceConversion.imgTranXYZ(R, G, B)
x_arr = np.array(x, dtype = np.uint8)
y_arr = np.array(y, dtype = np.uint8)
z_arr = np.array(z, dtype = np.uint8)
merged = cv2.merge([x_arr, y_arr, z_arr]) #合并R、G、B分量 默认顺序为 B、G、R
cv2.imshow("XYZ",merged)
cv2.imwrite(filePath.split("/")[-1].split(".")[0] + "-1160300426-XYZ.bmp", merged)
cv2.waitKey(0)
总结
这次的实验还是挺简单的,主要纠结的地方还是颜色空间的转换矩阵和转换方式有不同的标准,没有统一,因此不知道用哪个。总体的思路还是很清晰的。
最后,附上 github 的项目地址:实验四-图像颜色空间转换