一开始没写好就上传了,,,,,,,,这次来个全的
自己学MSP430是为了写一篇关于PID的文章,需要430在proteus上做仿真,一则认为在自动控制算法上PID真的很经典,PLC设备上大多是模块式的,拿来就是参考说明书设置,设置,,,而对于单片机而言就是程序!!!只有自己写出来PID算法,才能对PID有更深刻的理解,..二来感觉自己已经好久都没有写一篇让自己感到满意的文章了......
这些天,,,,今天终于解除了我的很大疑惑了,,,,,,,终于可以完成这篇普通普通定时器中断的文章了,,,,,,其实说普通也不普通,,MSP430的定时器确实设计的很强悍,,,,,,,,
其实对于普通定时器吧!不外乎,,,,定时,,,,产生中断,,,,细节问题就不说了,,,,看我下面的理论介绍部分,,其实写文章一部分是为了分享,最重要的是考验自己到底有没有真正的学会,真正的深入理解了自己所学的东西,自己学东西是一步一个脚印,这倒是高中的班主任的功劳,现在想想自己自学从高三就开始了,没想到当年的班主任的一段话对自己的影响竟然如此的大..如果文章有问题希望亲们给意见哈,,,
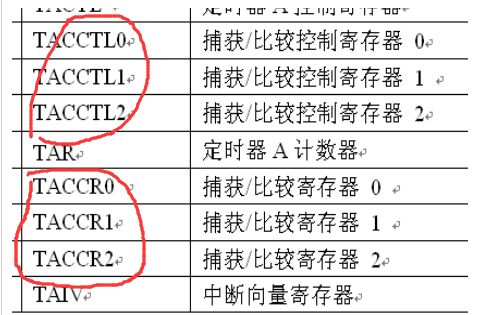
CCR0 和 TACCR0 是一个哈,,,,,,,,别在别处看到CCR0就蒙了哈,,,这是设置的计数比较值,,

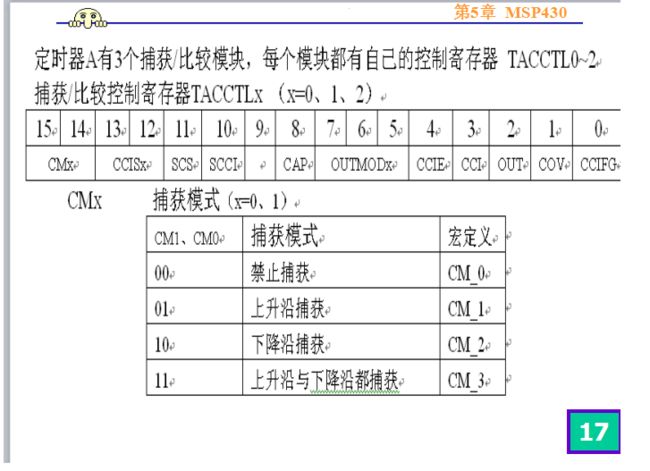
430的定时器能选择时钟来源,,具体看下面,,,如果不选择那么就是用一个引脚(特定的)的输入PWM作为他的时钟了
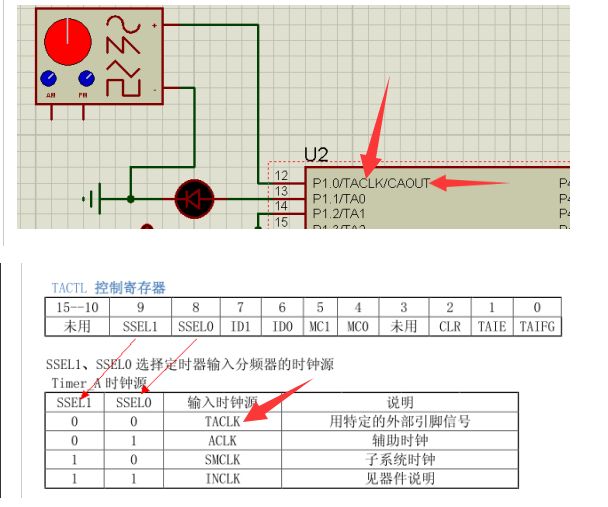

先上菜----外部引脚来四个上升沿就进入下面的中断函数
实质----内部计数器TAR在计数到CCR0(TACCR0)时就进来了
__interrupt void Timer_A0 (void) //定时器A0中断服务程序 { P4OUT ^= BIT1; //P4_1引脚反转 }
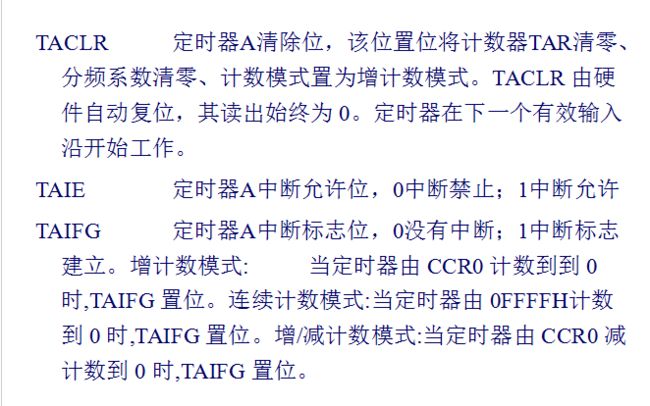
然后再来一个上升沿,,就会进入---溢出中断-------可以取消,不让他有溢出中断
实质----内部计数器TAR在计数到CCR0后,,再来一个上升沿就变成 0 了,,,然后就就进来了
__interrupt void Timer_A1 (void) //A1,A2,溢出中断都会进 { switch( TAIV ) { case TAIV_TAIFG://溢出中断 P4OUT ^= BIT1; //P4_1反转 break; } }
下面是完整的程序
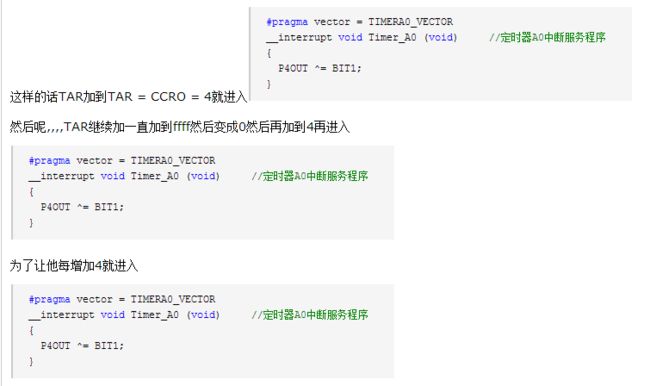
P1_0引脚,来四个上升沿TAR变为4,,P4_1反转,,,再来一个沿TAR变为0,再来四个,TAR变为4,,P4_1反转,再来一个沿TAR变为0,再来四个,TAR变为4,,P4_1反转,,,循环
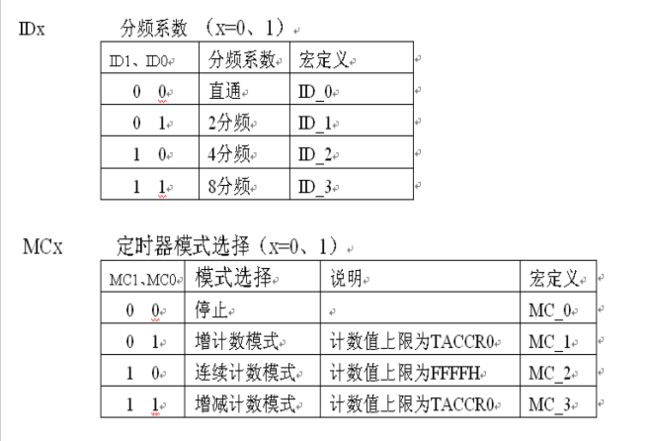
所以发现第一次来四个P4_1反转,,,,后来的都是来5个再反转了,,所以如果你想来四个反转,,那么TACCR0应该为3
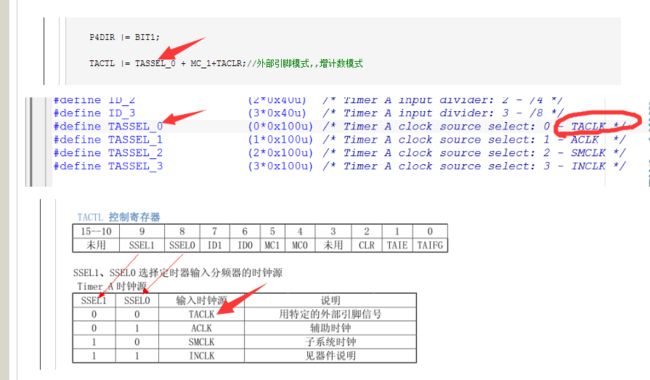
#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1; TACTL |= TASSEL_0 + MC_1+ TAIE + TACLR;//时钟外部引脚输入,增计数模式,产生溢出中断(可以取消),清除一下溢出,,其实严谨一点嘛,先清除再说 TACCR0 = 3;//计数值3 TACCTL0 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { P4OUT ^= BIT1; } #pragma vector = TIMERA1_VECTOR __interrupt void Timer_A1 (void) //A1,A2,溢出中断都会进 { switch( TAIV ) { case TAIV_TAIFG://溢出中断 P4OUT ^= BIT1; break; } }
现在去掉溢出中断

#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1; TACTL |= TASSEL_0 + MC_1+TACLR;//外部引脚模式,,增计数模式 TACCR0 = 3;//计数值3,其实是4,,因为有一个溢出变为0 TACCTL0 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { P4OUT ^= BIT1; }
下面是一些具体解释

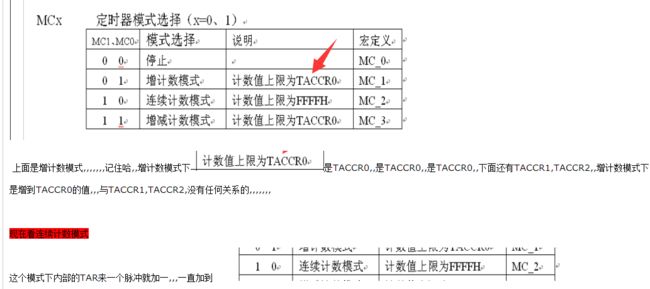
#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1+BIT2; TACTL |= TASSEL_0 + MC_2+TACLR;//外部引脚模式,,连续计数模式 TACCR0 = 4;//计数值4 TACCTL0 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { P4OUT ^= BIT1; }
可以这样
#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1+BIT2; TACTL |= TASSEL_0 + MC_2+TACLR;//外部引脚模式,,连续计数模式 TACCR0 = 4;//计数值4 TACCTL0 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { TACCR0 = TACCR0 + 4;//******这里,这里***********// P4OUT ^= BIT1; }
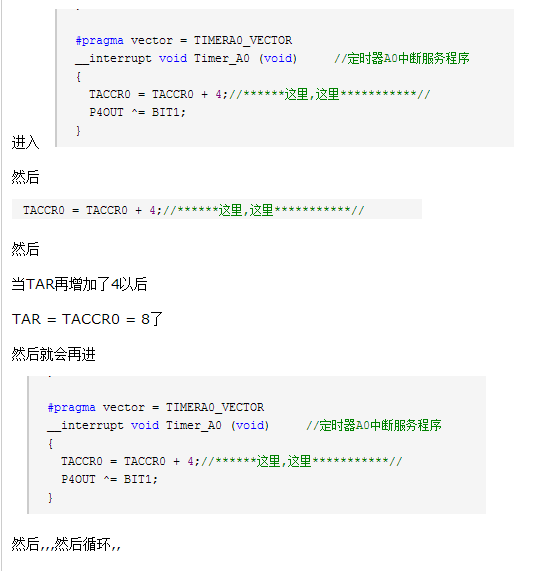
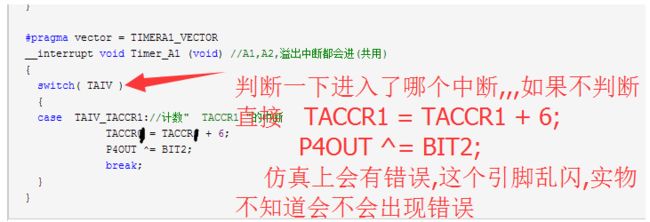
因为是连续计数模式,所以可以用TACCR1了,,,,
#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1+BIT2; TACTL |= TASSEL_0 + MC_2+TACLR;//外部引脚模式,,连续计数模式 TACCR0 = 4;//计数值4,TAR==TACCR0进入它的中断函数 TACCTL0 = CCIE;//允许中断 TACCR1 = 6;//计数值6,TAR==TACCR1进入它的中断函数 TACCTL1 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { TACCR0 = TACCR0 + 4;//******这里,这里***********// P4OUT ^= BIT1; } #pragma vector = TIMERA1_VECTOR __interrupt void Timer_A1 (void) //A1,A2,溢出中断都会进(共用) { switch( TAIV ) { case TAIV_TACCR1://计数" TACCR1 "的中断 TACCR1 = TACCR1 + 6; P4OUT ^= BIT2; break; } }
既然有溢出中断那么再加上溢出中断吧
#include "io430.h" void main( void ) { // Stop watchdog timer to prevent time out reset WDTCTL = WDTPW + WDTHOLD;//关闭看门狗 P4DIR |= BIT1+BIT2+BIT3; TACTL |= TASSEL_0 + MC_2 + TAIE +TACLR;//外部引脚模式,,增计数模式 TACCR0 = 4;//计数值4,TAR==TACCR0进入它的中断函数 TACCTL0 = CCIE;//允许中断 TACCR1 = 6;//计数值6,TAR==TACCR1进入它的中断函数 TACCTL1 = CCIE;//允许中断 __enable_interrupt();//打开总中断 } #pragma vector = TIMERA0_VECTOR __interrupt void Timer_A0 (void) //定时器A0中断服务程序 { TACCR0 = TACCR0 + 4;//******这里,这里***********// P4OUT ^= BIT1; } #pragma vector = TIMERA1_VECTOR __interrupt void Timer_A1 (void) //A1,A2,溢出中断都会进(共用) { switch( TAIV ) { case TAIV_TACCR1://计数" TACCR1 "的中断 TACCR1 = TACCR1 + 6; P4OUT ^= BIT2; break; case TAIV_TAIFG://溢出中断,,,,ffff变0时 P4OUT ^= BIT3; break; } }
下面是理论知识的介绍,,,看了上面再看一下下面,,,,,
通俗来讲,430F249有三个振荡器,LFXT1,,XT2,,DCO,
内部的主时钟MCLK,,子系统时钟SMCLK和辅助时钟ACLK是由这三个振荡器来源提供的.

MCLK:主时钟
可以选择3个振荡器(LFXT1、XT2、DCO)之一,或它们1/2/4/8分频后作为其信号源;
SMCLK:子系统时钟
可以选择2个振荡器(XT2、DCO),或它们1/2/4/8分频后作为其信号源;
ACLK:辅助时钟
只能由LFXT1时钟信号或1/2/4/8分频后作为其信号源。



有三个呢!!!真多





自从博客可以复制粘贴图片,感觉真是太方便了