论文阅读:Survey of eye movement recording methods
Survey of eye movement recording methods
眼动的第三篇概述类文章,也是最早的一篇。
摘要
阅读之前要知道,这是一篇1975年的论文,是对当时已知的眼球运动测量技术的概述型文章,阐述了它们的工作原理及其主要优缺点。论文包括五个部分:(1)球运动的类型;(2)眼球的构造;(3)眼球运动的测量方法;(4)测量方法的选择;(5)总结主要发现。
文章重点阐述的是眼球运动的测量方法,分别列举了Electro-Oculography;Corneal Reflection;Limbus, Pupil, and Eyelid Tracking;Contact Lens Method;Point of Regard Measurement: Tracking of Corneal Reflection Center with Respect to the Pupil Center;Measurement of Eye Rotation by the Double Purkinje Image Method;Measurement of Fixation Point by Determining the Rotation of a Plane Attached to the Eye;Head Movement Measurement to Obtain Point of Regard共8种方法。
TYPES OF EYE MOVEMENT
- Saccadic eye movements
Saccadic eye movements是一种快速的成对眼球运动(conjugate eye movements),通过这种运动我们可以自动地将注视从一个点改变到另一个点。它的特点是初始加速和最终减速非常高(高达40000度/秒),运动过程中的峰值速度随眼球运动幅度的变化而变化,可能高达400至600度/秒,Saccadic eye movements的持续时间也随其大小而变化。
- Pursuit movements(slow-tracking movements)
Pursuit movements是成对的眼球运动,用于追踪1到30度范围内缓慢移动的视觉目标。其特点是移动十分平滑。
- Compensatory eye movements
Compensatory eye movements是一种平滑的运动,与追踪运动密切相关。同他的名字一样,它补偿头部或躯干的主动或被动运动。在头部运动过程中,它们趋向于稳定固定物体的视网膜图像。
- Vergence eye movements
Vergence eye movements是指两只眼睛为了融合近、远物体的图像而向相反方向运动。与普通的成对眼球运动相比,Vergence eye movements要慢得多,而且要平滑得多,并且是不可预测的。
- Miniature eye movements
Miniature eye movements,又被称作fixation movements(固定运动),包括各种通常小于1度的幅度,并发生在试图稳定固定目标的过程中。即盯住某个位置不动的运动。
- Optokinetic nystagmus
Optokinetic nystagmus,也被称为“"train nystagmus”,是一种典型的锯齿状眼动模式。Optokinetic nystagmus由一个缓慢的阶段组成,在这个阶段,眼睛注视着某个对象,然后跟随着运动;以及一个快速阶段或返回跳,在返回跳这个阶段,眼睛注视着一个新的部分。其特点是锯齿状。
- Vestibular nystagmus
Vestibular nystagmus是一种眼球的振荡运动,与Optokinetic nystagmus相似,是锯齿状的眼动模式。主要是由于在头部旋转过程中刺激半规管。这是由运动引起的,由对神经系统的刺激直接造成的,可用于临床诊断。
- Spontaneous nystagmus
Spontaneous nystagmus(自发性眼球震颤),或称gaze nystagmus(注视性眼球震颤),是眼球震颤的一种异常,与许多神经系统疾病有关。眼球震颤可能大到可以直接观察,也可能小于1度,需要记录才能检测。注视眼球震颤只有当受试者朝某个方向看时才被观察到。
- Torsional eye movements
Torsional eye movements是眼球围绕注视线的旋转运动,通常限于10度角的角度。是由头部相对于垂直方向的倾斜而引起的。头部旋转引起的Torsional eye movements和垂直方向的Vestibular nystagmus相似。此外,由于头部相对于垂直方向的倾斜,眼球围绕扭转轴的反向滚动或稳定状态偏移的现象已被证实并证明是由人类耳石或前庭重力受体引起的。因此,它被认为是耳石功能的重要测量方法
MAJOR EYE MOVEMENT MEASUREMENT TECHNIQUES
- Electro-Oculography(EOG)
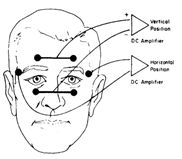
通过在眼睛周围放置皮肤电极并记录电位差来测量眼睛的位置。电能的来源是相对于眼睛旋转的角膜电位或静电场。电极可以使用氯化银或者镀金电极,用来提高舒适度,协助消除电磁干扰,以达到较好的效果。
Uenoyama, Uenoyama, and Iinuma (1964) and extended by Jeannerod, Gerin, and Rougier (1966):当一只或两只眼睛进行垂直和水平记录时,由于轴之间的耦合和记录的非线性而产生的误差是相当大的,因此本方法除了同时显示眼球运动的X和Y坐标外,还对两个上电极和两个下电极进行短路,以记录垂直眼球运动,如图所示。
Bles和Kapteyn,1973: 通过组合上图所示的单个电极输出,同时单独记录每只眼睛的垂直和水平运动,组合方法如下。

EOG是人类研究中应用的最广泛的客观方法,因为它不需要眼睛的可视化。该方法可用于眼睛运动至±70度。当偏移超过30度时,线性逐渐变差,特别是在垂直方向。表面电极的准确度为±1.5-2度。主要误差来源于肌肉伪影、眼睑干扰、技术中的非线性成分以及由光适应、昼间变化等引起的角膜视网膜电位变化。通过将集成电极放大器组件直接连接到皮肤上,以消除噪声敏感性并最大限度地降低屏蔽要求,可能会改善EOG性能。
- Corneal Reflection
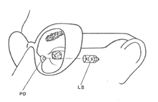
角膜凸起在视野区域产生虚拟图像。由于角膜曲率半径小于眼睛曲率半径,角膜反射相对于头部向眼球运动的方向运动。原理如下图,使用光学的手段使用反射角度φ来检测眼动。

根据光源的位置,有两种基本的角膜反射方法。在第一个,也是最古老的,光源是相对于被摄者的头部固定的。因此需要一个固定的头部系统、一种记录头部位置的方法(线性和角度),或者一种记录每个样品相对于头部的视场的技术。这些方法被称为头戴式或固定式角膜反射技术。第二种角膜反射法将光源固定在视野而不是头部,通过将光源放置在目标视野中,相对于瞳孔的角膜反射运动表明视野中眼睛的关注点。这些技术被称为角膜反射关注点仪器,对头部位置不太敏感。
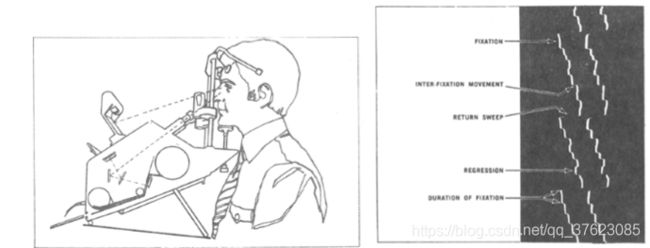
这种方法一般需要如图所示的设备固定头部,并在固定索引卡上显示阅读材料,每只眼睛角膜反射的水平运动被记录为移动胶片上的时间轨迹,产生如图所示的记录。垂直和水平扫描模式可以通过停止一段时间来显示。定时标记可以通过光的周期性中断来添加。
Buswell,1935:作为基本角膜反射技术的一种变体,允许连续监测眼睛的垂直和水平运动,角膜反射通过棱镜分成两束。一束光被记录在垂直移动的胶片上以产生水平的眼球运动,第二束光被引导到水平移动的胶片上以记录垂直运动。
Mackworth and Mackworth (1958):一个允许自由头部运动的系统,与头部对准的电影或电视摄像机不断记录着视野。角膜反射,作为来自外设灯的反射光斑测量,通过分束器与视觉场场景结合,并作为白点出现在胶片或视频显示器上,放置在被固定的场景部分上。系统示意图如图所示。由于光源相对于与头部运动相关的眼睛的相对运动存在较大误差,因此其精度比固定头部系统的精度差,约为±2度。一些商业验证的头部安装麦克沃思相机是可用的。

总体来看,角膜反射的方法鲁棒性较差,眼球较大的偏移使得反射在角膜的非球形部分发生,需要复杂的校准和线性化技术。而且反射范围最终受限于角膜的大小及其被眼睑遮挡的部分。除头部运动外,其他限制角膜反射方法精读的因素包括角膜形状和泪液厚度的变化、角膜散光以及眼镜产生的其他反射。
-
Limbus, Pupil, and Eyelid Tracking
同我之前整理的对瞳孔边界、瞳孔的追踪原理相同。本文提到两种方法,扫描方法和反射差分法。
Scanning methods -
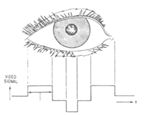
一种技术是用普通的电视摄像机对眼睛进行扫描,这种摄像机在近红外区域(700-900微米)具有足够的灵敏度,能够有效地进行红外照明。与虹膜和瞳孔相交的水平扫描有一个视频信号,如图所示,可以清晰的找到虹膜、瞳孔的边界。
-
图像解剖仪可用于跟踪瞳孔的周长以确定中心(Merchant,5),或仅跟踪边缘曲线的可见部分,并根据该信息计算其质心的坐标(Sheena,1969)。后一种方法允许眼睛偏移。这种方法不需要均匀地照亮眼睛并用大范围的扫描来跟踪,而是可以扫描眼睛上的一个小光点,并在每个时刻测量返回的反射光。Cornsweet(1958)使用了这种飞行点扫描仪来跟踪虹膜边界。Rashbas(1960)使用它来保持与边缘相切的一个固定角度方向的小光点,因此可以通过跟踪边缘的单个部分来测量垂直和水平眼的位置(见图)。

Differential reflection methods
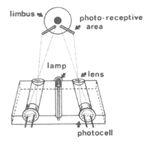
用两个或两个以上的小光电管直接观察眼睛的适当部位或检查其图像来测量边缘位置,也可以得到与大范围扫描类似的结果。有两种方法,宽光照并严格限制光探测的范围,或者在具有较大探测区域的眼睛上使用聚焦狭缝或光圈。
Torok, Guillemin, and Barnothy (1951) and Smith and Warter (1960):在photomultiplier前面放置一个小水平裂缝,当眼睛水平移动时,裂缝上的图像包含白色的巩膜的量会变化,这取决于眼睛移动的方向,因此光电管输出也会发生变化。它通过记录虹膜图像对侧两个光电管的输出差异来跟踪每只眼睛的水平运动。
Richter(1956)把光和光电池放在受试者戴的护目镜上,依靠的是巩膜发出的漫反射光,而不是图像见下图a。Stark和Sandberg(1961)使用两个小灯照亮虹膜两侧的小圆盘,并记录了从两个光电管观察这些区域时反射光的差异。见下图b。

Findlay(1974)使用分叉光纤束照亮边缘,并收集反射光,如图所示。这样,光源和探测器都有效地靠近眼睛,从而使探测器感应到的照明面积更小。
与扫描方法相同,差分反射法难以测量垂直眼动。为此,杨跟踪了上眼睑的位置,两个光电二极管的输出被安排成对水平运动相对不敏感。Mitrani、Yakimoff和Mateeff(1972)在这一方法上的一个新变体使用第三个光电管和单独的光源通过跟踪相关的下眼睑高度来测量垂直眼球运动。如图所示,来自该光源的光直接落在附加光电管上,部分被下盖遮蔽。虽然线性度是一个存在的问题,但与水平方向相比,分辨率为15弧分。
Wheeless等人(1966年):在一个用咬合板固定头部的固定系统中。把眼睛的图像送入两个探测器,这两个探测器分别进行水平或垂直记录。光源通过四个光纤束和它们的投影透镜引入眼睛,如图所示。通过具有可见光照明的分光器观察眼睛在屏幕上的成像。然后操纵四个光束以产生如图所示的眼睛上四个狭缝的图案,并更换红外滤光片进行记录。探测器3和4之间的差异是:是垂直眼的位置的测量,与瞳孔直径无关。

琼斯(1973):描述了另一种变体,只使用了两个光电管。他在每个光电池前面使用非常短焦距的透镜(12 mm)和矩形掩模,在图示方向将3.8 x0.5 mm的光电池场条投射到下虹膜边缘。水平眼运动对两个光电池所感应到的光有不同的影响,而垂直运动对光的影响也类似。通过分别增加和减少两个光电管输出,用一个简单的装置实现了垂直和水平眼位置的非线性测量。
总的来说,这些技术的许多实现在合理的范围内产生了良好的结果和良好的精度。输出为电记录,具有良好的频率响应。然而,如前所述,垂直眼球运动是一个问题。此外,这种技术还需要固定头部或安装头部的装置。虹膜的着色也可能是其利用的一个因素。 -
Contact Lens Method
使用隐形眼镜的方法是最精确的眼球运动测量技术,这种技术使用了一些与眼睛紧密相连的隐形眼镜,但同样也是最不舒适的方法。这种技术在前几篇论文中已经进行过了讨论。
最常用的隐形眼镜系统是“optical lever”,其中一个或多个平面镜表面研磨在透镜上,将光源的光反射到照相板或光电管或象限探测器阵列上。(后者是固态光电探测器装置,产生一对与落在敏感区域的光斑的X和Y坐标成比例的电压。它用于下面讨论的双浦肯野成像方法。)
对这种方法的一个补充是,把一个多线构成的图形,固定在隐形眼镜杆上,通过移动胶片上的狭缝成像,如图所示。一条粗线和几条细线的薄膜图案包含垂直、水平测量所需的所有信息。

Robinson (1963):提出了线圈探测技术,两个相互垂直并嵌在隐形眼镜中的小线圈,从环绕被摄物体的两个大的垂直电磁线圈中获取感应电压。每个线圈中的感应电压仅随相对于磁极的视角正弦值而变化,并且与磁极均匀部分内的磁头位置无关。在两个大线圈中使用不同的频率或正交相位可以检测每个搜索线圈和每个驱动平面之间的角度。这项技术可以精确地定位眼睛的位置。
总的来说,隐形眼镜技术尽管很精确,但其价格和对用户引起的不适让其难以投入应用,并且这种技术可能会对用户产生伤害。
- Point of Regard Measurement: Tracking of Corneal Reflection Center
with Respect to the Pupil Center
人们感兴趣的往往是用户观察的点,而并非眼球相对于头部的位置。在之前的论文中也有过讨论。
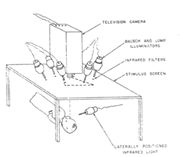
在使用多种光源的广角角膜反射技术的另一个应用中,Salapatekand Kessen(1966年)和后来的Haith(1969年)开发了一种用于人类幼儿的广角角膜反射技术。下图所示为幼儿头部固定式红外线照明器的布置。眼睛的电视图像包含部分或全部六个红外照明器的角膜反射;使用录像带逐帧进行分析。瞳孔中心的x-y坐标和特定的红外反射的x-y坐标是用光标测量的,光标的位置由视频监视器上的叠加十字勾勒出来。通过使用视频混合系统,可以将第二个电视图像添加到第一个图像中,以便每个帧包含眼睛位置和正在扫描的场的图像。
Merchant:开发了oculometer,在oculometer中,一个光源被用来对瞳孔产生角膜反射。通过跟踪眼睛随眼睛位置和头部位置不同而移动,克服了获得与场景有关的净眼睛运动的问题。通过观察与光度计中的照明光学元件同轴的光学元件来观察瞳孔。角膜反射始终与角膜曲率中心一致。角膜反射点到瞳孔中心的位移等于角膜曲率中心到瞳孔中心的位移,并且只与眼睛转动有关。见图可以看到这种现象,这表明在头部的横向运动的同时旋转眼睛,盯紧目标,瞳孔位置中心的角膜反射保持不变。

Honeywell and Whittaker:使用隐形红外光源进行角膜反射,并在红外区域使用具有足够灵敏度的电视摄像机来轻松检测这种强光。在他们的原始版本中,使用可见光。通过使房间中的所有光源都极化,除了一小部分,并通过另一个偏振滤光片将所有返回的光传递给一个低亮度的电视摄像机。
总体而言,这种方法不需要任何头部位置测量或头部限制,具有相当的优势。它们是舒适的;数据的形式通常非常便于处理;照明是红外的,因此不会令人受到干扰。许多装置还包括大量的信息和信号处理,允许将眼球运动测量的局限性扩大到更大范围的眼球运动和更均匀的头部运动裕度,通过平均、线性化和各种其他方法改进信号。这种仪器比其他各种更简单、更直接的眼球运动测量方法更昂贵。它通常体积更大,学习使用也更复杂,但一旦学会使用就会很轻松。这些方法缺少速度;电视系统只能以每秒60个样本的速度运行。基本速度限制来自电视摄像管的滞后。而且,其精度不如用固定头隐形眼镜、角膜缘跟踪或角膜反射法。
-
Measurement of Eye Rotation by the Double Purkinje Image Method
在之前的文章阅读中已经有了很详细的说明。当眼睛进行平移时,第一和第四反射(见图)同时移动,但在旋转过程中,反射的间隔会发生变化。这种距离提供了眼睛角度方向的测量。方法利用这些反射(Purkinje图像)之间的差异称为Dual Purkinje方法。Dual Purkinje技术的精度一般较高,但由于第四幅Purkinje图像较弱,因此需要严格控制光照条件。

它是唯一一种可以在保证精确度的前提下,独立于头部运动来测量眼睛位置的方法。此外,这种方法允许的头部移动量仍然不大。 -
Measurement of Fixation Point by Determining the Rotation of a Plane
Attached to the Eye本部分分为三种方法讨论,一种方法是确定观察者眼中瞳孔的明显椭圆度。第二种方法是将这样一个平面连接到眼睛上,这个平面可以是一个带有隐形眼镜的平面镜,也可以是嵌入隐形眼镜的探测线圈平面(Robinson,1963)。最后一种独立于头部运动的方法是跟踪聚焦在视网膜上的图像。如果一只眼睛注视着空间中的一个特定点,那么这个点总是落在头部平移或眼睛旋转的中央凹处。这一原理是由Cornsweet(1958)开发的视网膜图像跟踪器实施的。同样,这里的原理是测量附着在视网膜上的平面的旋转。
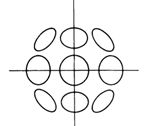
Ellipticity of the pupil
测量值是眼睛位置的一个偶数函数,必须用一些其他的方式来区分上下和左右。第二个问题是需要进行相当复杂的几何计算。见图,因此,这种方法没有成功的实现。
Contact lens method
在前面的章节已经讨论过。
Tracking of a retinal image
Cornsweet(1958):让一个受试者盯紧一个点,他将一个视网膜的光斑投射到光盘上,如图所示。如果固定点和光斑之间的关系是恒定的,则磁盘上的光斑位置只随固定的变化而变化。在磁盘上选择一个明显的血管,移动视野中的点,然后重新定位在血管所需要的距离就是图像斑点的相对位移。

该方法的分辨率主要受到仪器噪声的限制。此外,血管直径的变化和垂直眼球运动也是个问题。大幅度的眼球运动会把光斑从光盘上移开并失去测量值。这是一种不需要固定头的非常精确的方法。但它似乎仅限于与观察视网膜相关的实际问题。 -
Head Movement Measurement to Obtain Point of Regard
本部分给出了当前和先进的头部角度监测方法(头部视线、LOS),适用于结合眼睛测量技术来产生眼睛的关注点。除了与角膜反射瞳孔向量系统一起讨论的眼睛跟踪视频方法外,所有的头部测量技术都需要头部佩戴。基本上使用了五种方法:光学、超声波、电磁、惯性和机械。除了最后一个,其他的都可以在受试者的头部和周围环境没有任何机械连接。
光学
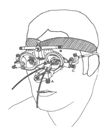
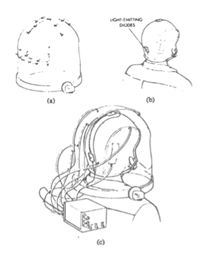
最常见的光学头跟踪装置采用一种头盔,头盔上有一排光源(或光电探测器),以及固定在周围的角形装置。系统用于测量宇航员头部角度,如图所示。它使用头盔内衬上的三个微型脉冲红外LED和八个光电二极管阵列作为接收器(Chouet&Young,1974)。利用小型计算机和补偿电路,使各轴头部角度测量之间的交叉耦合最小化。
下图所示的一个这样的系统是为了在驾驶舱的限制范围内跟踪飞行员的视线而开发的(Ferrin,注12)。传感器测量单元(SSU)固定在实验室或驾驶舱上,发出两束薄的扇形红外光束,扫过头盔中的光电探测器,在交叉点触发每一束。头盔两侧的红外风扇和探测器的使用增加了头部运动的范围,同时仍在跟踪视线。尽管由于头盔和相关显示设备的存在,该系统和相关系统显得笨重,但用于头部跟踪的实际硬件只能是两到四个微型光电探测器。

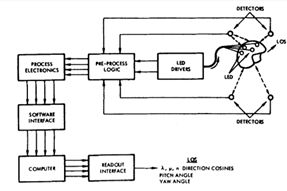
一种新的设计采用了安装在头盔上的四个LED,每个LED以不同的频率脉冲(Haywood 13)(见图)。在固定框架内最多可放置四个光学线性位置比例探测器。每个探测器测量其视场中每个光源图像的X-Y坐标,从而向计算机提供头盔视场角分辨率所需的信息。这样一个系统的目标是在每个轴上的±75度范围内,使头部俯仰和偏航的静态精度达到±1度。
超声波
在头盔和实验室中使用多个超声波发射器和探测器,可以通过测量每个声源到每个接收器的距离,通过声波延迟时间来感知头部位置。如图所示的是超声波发送器和接收器的一种布置,特别适用于俯仰和横向旋转头运动传感(Sawamura,14)。

电磁
Steinman(17)描述了将Robinson(1963)的搜索线圈放置在受试者的眼镜架上,以检测其头部的角度位置。受试者坐着,周围有感应磁铁,测量探测线圈相对于周围系统产生的磁场的相对方向。
惯性
用微型陀螺仪和安装在头盔上的加速度计可以进行头部运动的惯性测量。但系统的尺寸和费用目前是无法接受的。然而,对于受试者角速度或加速度的大体测量,如vestibular nystagmus的研究,这种系统是可行的(Howland,1961)。
机械
头部位置通过机械连接来测量,并传输给实验室工作台。这一步的头部位置会受到电缆的限制。机械测量的下一步是用测角仪测量一个物体相对于另一个物体的角度。这些通常由刚性或伸缩杆组成,每个连杆上都有电位计,用于测量头部角度。
Sperry:开发了一种具有磁性快速断开装置的刚性连接系统,用于飞行员头盔方位测量。将一个带垂直和水平电位计的双框架系统与一个边缘反射式眼动监测器相结合,形成一个实用的眼点观测系统。机械连接的一端连接到目标区域的一个点上,另一端通过“pipestem”咬合板固定在受试者的臼齿之间。该装置允许在20度垂直和40度水平的范围内,头部移动高达20 cm,眼点测量精度优于1度(见图)。

另外一种高精度机械头位置传感器是由Vickers开发的,它使用一根伸缩管,一端连接在天花板上,另一端通过连接到受试者的头部设备上。仪器的重量由恒力弹簧支撑。耳机上的六个旋转脉冲发生器测量了位置的6自由度变化,在大约2英尺高和5英尺直径的体积内,平移分辨率为百分之一英寸,旋转0.3弧分。
TRADE-OFFS AND GENERAL CONSIDERATIONS IN INSTRUMENTATION SELECTION FOR EYE MOVEMENT RESEARCH
对于特定的眼球运动仪器要求,并非所有不同测量条件的最高性能标准都需要产生有用的结果。对特定的任务有些参数比其他参数更重要。应选择并采用满足最低要求的最佳系统(见表)。
需要考虑的因素依次为:舒适性、设置时间和精确度;性能和成本;目标和效果;适用人群;输出数据的形式和处理难度。


Conclusion
这是一篇很早的论文,但是其大部分技术在当今仍适用,本篇论文相较于前两篇列举了更多的具体实现,包括设备的外观,基本结构图等。还包含了眼动的基本形式以及眼睛一些常用特征,非常适合入门。
与前两篇一样,由于时间等诸多限制,无法对每一种技术都深入研究,只能留个大概印象,知道大概原理,日后遇到相关问题再行查阅。