基于opencv使用人工图像处理算法实现车道偏离报警(LDW)
今天讲一下车道偏离报警的整体算法实现,但是不能把项目中的所有代码都搬过来,毕竟商用几万台车的代码,要是让公司看到估计会有小麻烦。不过我还是找了一些demo放上来分析,这样才好玩。
首先,这次讲的ldw没有使用传统的机器学习方法,更没有使用深度学习,而是用经典的图像处理领域的人工算法实现的,包括边沿提取、霍夫变换,当然为了实现ldw还要进行摄像头标定,进行平面几何计算,当然都不会用到微积分和线性代数,高中知识就可以搞定,咱们接着看。
首先,要实现ldw,就要设定报警的触发条件,我用图片解释一下:

当车辆位于行车道中间位置时,左车道线和右车道线的延长线应该相交于红色矩形框内,当然矩形框是安装设备时标定好的。
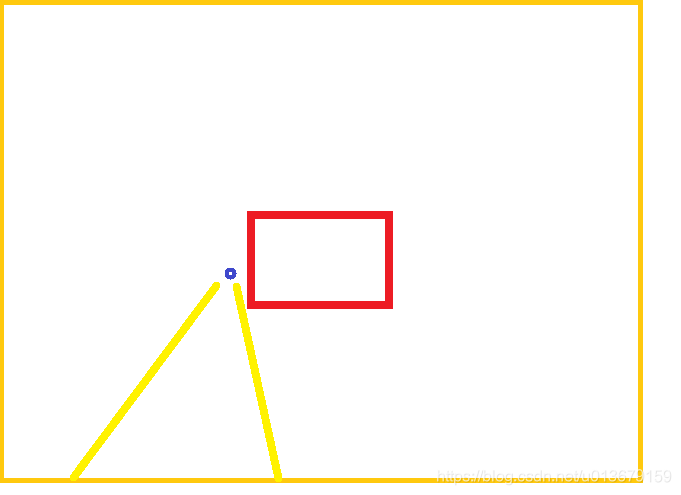
当交点位于红框之外时,则判定车辆发生偏离,当然还有其他判断方法,这里只讲这一种。类似方法也适用于摄像头角度标定。
相关标准请参考JT_T883-2014,当然,将来我们讲到FCW(前碰撞预警)的时候还会提到这个标准。
接下来看一下实例代码
import cv2 as cv
import numpy as np
# import matplotlib.pyplot as plt
def do_canny(frame):
# Converts frame to grayscale because we only need the luminance channel for detecting edges - less computationally expensive
gray = cv.cvtColor(frame, cv.COLOR_RGB2GRAY)
# Applies a 5x5 gaussian blur with deviation of 0 to frame - not mandatory since Canny will do this for us
blur = cv.GaussianBlur(gray, (5, 5), 0)
# Applies Canny edge detector with minVal of 50 and maxVal of 150
canny = cv.Canny(blur, 50, 150)
return canny
def do_segment(frame):
# Since an image is a multi-directional array containing the relative intensities of each pixel in the image, we can use frame.shape to return a tuple: [number of rows, number of columns, number of channels] of the dimensions of the frame
# frame.shape[0] give us the number of rows of pixels the frame has. Since height begins from 0 at the top, the y-coordinate of the bottom of the frame is its height
height = frame.shape[0]
# Creates a triangular polygon for the mask defined by three (x, y) coordinates
polygons = np.array([
[(0, height), (800, height), (380, 290)]
])
# Creates an image filled with zero intensities with the same dimensions as the frame
mask = np.zeros_like(frame)
# Allows the mask to be filled with values of 1 and the other areas to be filled with values of 0
cv.fillPoly(mask, polygons, 255)
# A bitwise and operation between the mask and frame keeps only the triangular area of the frame
segment = cv.bitwise_and(frame, mask)
return segment
def calculate_lines(frame, lines):
# Empty arrays to store the coordinates of the left and right lines
left = []
right = []
# Loops through every detected line
for line in lines:
# Reshapes line from 2D array to 1D array
x1, y1, x2, y2 = line.reshape(4)
# Fits a linear polynomial to the x and y coordinates and returns a vector of coefficients which describe the slope and y-intercept
parameters = np.polyfit((x1, x2), (y1, y2), 1)
slope = parameters[0]
y_intercept = parameters[1]
# If slope is negative, the line is to the left of the lane, and otherwise, the line is to the right of the lane
if slope < 0:
left.append((slope, y_intercept))
else:
right.append((slope, y_intercept))
# Averages out all the values for left and right into a single slope and y-intercept value for each line
left_avg = np.average(left, axis = 0)
right_avg = np.average(right, axis = 0)
# Calculates the x1, y1, x2, y2 coordinates for the left and right lines
left_line = calculate_coordinates(frame, left_avg)
right_line = calculate_coordinates(frame, right_avg)
return np.array([left_line, right_line])
def calculate_coordinates(frame, parameters):
slope, intercept = parameters
# Sets initial y-coordinate as height from top down (bottom of the frame)
y1 = frame.shape[0]
# Sets final y-coordinate as 150 above the bottom of the frame
y2 = int(y1 - 150)
# Sets initial x-coordinate as (y1 - b) / m since y1 = mx1 + b
x1 = int((y1 - intercept) / slope)
# Sets final x-coordinate as (y2 - b) / m since y2 = mx2 + b
x2 = int((y2 - intercept) / slope)
return np.array([x1, y1, x2, y2])
def visualize_lines(frame, lines):
# Creates an image filled with zero intensities with the same dimensions as the frame
lines_visualize = np.zeros_like(frame)
# Checks if any lines are detected
if lines is not None:
for x1, y1, x2, y2 in lines:
# Draws lines between two coordinates with green color and 5 thickness
cv.line(lines_visualize, (x1, y1), (x2, y2), (0, 255, 0), 5)
return lines_visualize
# The video feed is read in as a VideoCapture object
cap = cv.VideoCapture("input.mp4")
while (cap.isOpened()):
# ret = a boolean return value from getting the frame, frame = the current frame being projected in the video
ret, frame = cap.read()
canny = do_canny(frame)
cv.imshow("canny", canny)
# plt.imshow(frame)
# plt.show()
segment = do_segment(canny)
hough = cv.HoughLinesP(segment, 2, np.pi / 180, 100, np.array([]), minLineLength = 100, maxLineGap = 50)
# Averages multiple detected lines from hough into one line for left border of lane and one line for right border of lane
print('hough')
print(hough)
lines = calculate_lines(frame, hough)
# Visualizes the lines
lines_visualize = visualize_lines(frame, lines)
cv.imshow("hough", lines_visualize)
# Overlays lines on frame by taking their weighted sums and adding an arbitrary scalar value of 1 as the gamma argument
output = cv.addWeighted(frame, 0.9, lines_visualize, 1, 1)
# Opens a new window and displays the output frame
cv.imshow("output", output)
# Frames are read by intervals of 10 milliseconds. The programs breaks out of the while loop when the user presses the 'q' key
if cv.waitKey(50) & 0xFF == ord('q'):
break
# The following frees up resources and closes all windows
cap.release()
cv.destroyAllWindows()
如果要做这个实验,请clone原文作者的github:https://github.com/chuanenlin/lane-detector.git
里面有要用的代码和视频文件。
简单说下这个代码的逻辑,首先读取视频文件,循环处理每一帧图像,使用opencv的边缘检测Canny检出图像的边缘信息,然后做一个掩码,减少用于霍夫变换的图像面积,接下来进行霍夫变换提取出可能的直线,然后将所有直线分类,根据斜率将直线分为左右两组,然后求平均值,最终获取到2条车道线,当然在实际应用中,还要考虑直线的斜率有一定的范围,超出正常范围的直线要滤出。
参考链接1:https://towardsdatascience.com/tutorial-build-a-lane-detector-679fd8953132
参考链接2:https://medium.com/@mrhwick/simple-lane-detection-with-opencv-bfeb6ae54ec0