线性时不变系统(LTI)对复指数信号的响应(数字信号处理的特征值与特征函数)
目录
序言
一类重要的基本信号
线性时不变系统对复指数信号的响应
特征函数以及特征值定义:
证明复指数信号是LTI系统的特征函数
简单运用上述性质
序言
复指数信号有相比于其他信号优良的性质,这使得其在数字信号处理以及信号与系统中(统称为信号处理)具有不一般的低位,例如复正弦信号
它不仅是离散信号做傅里叶变换时的基函数,同时也是线性时不变系统的特征信号。
看了一下内容后,你就会懂得上面的描述!
![x[n]=e^{jwn}=coswn+jsinwn](http://img.e-com-net.com/image/info8/3cb50b0bacb24463896bef4b3273eafb.gif)
一类重要的基本信号
在研究线性时不变系统时,将信号表示成基本信号的线性组合是很有利的,这些基本信号应该满足下面的两个性质:
1、由这些基本信号能够构成相当广泛的一类有用信号;
2、线性时不变系统对每一个基本系统的响应应该十分简单,以使系统对任意输入信号的响应有一个很方便的表达式。
那什么样的基本信号满足上面的条件呢?
由傅里叶分析可知,连续和离散时间复指数信号集都具有上述两个性质,即连续时间的 和离散时间的
和离散时间的 ,其中s和z都是复数。
,其中s和z都是复数。
线性时不变系统对复指数信号的响应
基于如下事实:
一个线性时不变系统对复指数信号的响应也是同样一个复指数信号,不同的只是幅度上的变化。
连续以及离散时间复指数信号的响应分别是:
其中,![]() 是复振幅因子,一般来说是复变量s以及z的函数,但是对于变量t来说,它等价于一个常数。
是复振幅因子,一般来说是复变量s以及z的函数,但是对于变量t来说,它等价于一个常数。
这就说明了,复指数信号经过线性时不变系统的响应是它本身,即同样也是一个复指数信号,只不过幅度上有所变化。
特征函数以及特征值定义:
一个信号,若系统对该信号的输出响应仅是一个常数(可能是复数)乘以输入,则称该信号为系统的特征函数(eigenfunction),而幅度因子称为系统的特征值(eigenvalue)。
证明复指数信号是LTI系统的特征函数
下面证明复指数信号确实是LTI系统的特征函数,也就是说复指数信号作为LTI系统的激励,其响应也是复指数信号。
手稿:
首先是连续复指数信号![]() ,求其经过线性时不变系统的输出,假设线性时不变系统的系统函数为
,求其经过线性时不变系统的输出,假设线性时不变系统的系统函数为

这就证明了连续复指数信号是LTI系统的特征函数,而常数 就是与特征函数有关的特征值。
就是与特征函数有关的特征值。
下面证明离散复指数信号![x[n]=z^{n}](http://img.e-com-net.com/image/info8/76e3285e00d1454f858085d2892e2a98.gif) 是LTI系统的特征函数:
是LTI系统的特征函数:
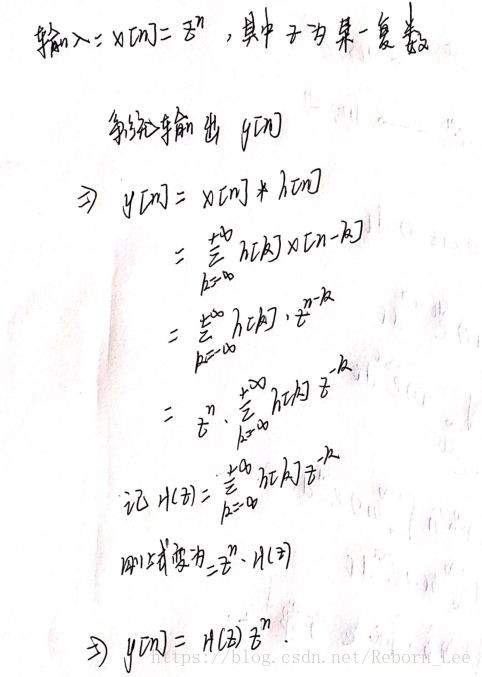
同样证明了离散复指数信号是LTI系统的特征函数,常数H(z)是与特征函数有关的特征值。
简单运用上述性质
既然,复指数信号作为LTI系统的输入,其输出有这么简便的表示方法,真是造福科学呀!
我们不禁设想如果一个信号都可以表示成复指数信号,那么其输出岂不很简单?事实上也是如此,但多大范围的信号可以用复指数的线性组合来表示呢?
(我们将由这个思路来引出下一篇博文,周期信号的傅里叶级数表示,任意一个周期信号还真能表示成复指数信号的组合形式!)
下面以手稿的形式,展示上面叙述的简单运用(模拟情况):

离散的情况如下:

这其中的![]() 都是复数。
都是复数。
这就说明:
对于连续时间以及离散时间来说,如果一个线性时不变系统的输入能够表示成复指数信号的线性组合,那么系统的输出也能够表示成相同复指数信号的线性组合;并且在输出表示式中的每一个系数可以用输入中响应的系数
分别与特征函数
有关的系统特征值
相乘来求得。