MIT Mini Cheetah 的驱动与结构原理解读以及对尺寸效应
来源 | 知乎
作者 | 任赜宇
目录
1.前言
2.模块化驱动器
3.整体平台结构设计
4.尺寸效应
▌1.前言
本文是根据Benjamin G. Katz的硕士毕业论文(Download Link)来介绍MIT Mini Cheetah的驱动设计和相关硬件结构。最后再分享下作者关于腿足式机器人这类爆发式跳跃运动,针对尺寸效应的思考。
▌2.模块化驱动器
- 整体思路
MIT Mini Cheetah的整体驱动器设计的指导思路是控制成本,简而言之是要在最低价格上做到最高性能,他们最终把单个驱动器的成本控制在了300美元左右(以50采购量为基准)。
整体的驱动特征还是遵循MIT Cheetah组一贯的本体驱动器(Proprioceptive Actuator)的思路:
大扭矩密度电机(T-Motor U8)+低减速比齿轮箱(6:1) = 大扭矩密度+高反向驱动能力+高力控通频带宽能力
- 电机
MIT Cheetah Mini驱动器采用的电机是类似于公版电机T-Motor U8的型号。
Benj的Thesis没有透露出具体的型号,但提到了性能和尺寸类似于这类公版电机,只是价格更低,因此可以以此型号做参考。T-Motor U8这款电机是广泛应用于四旋翼的,产量大且价格低,因此相比较于MIT Cheetah 3的昂贵的定制电机,在降低成本上有非常大的优势。

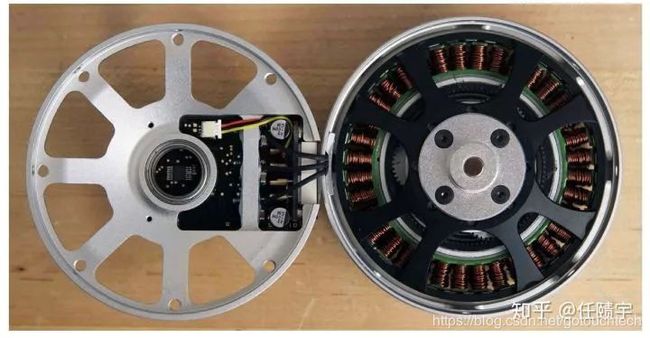
无刷电机中的定子(左)和转子(右)
上图所示为无刷电机中的定子和转子,注意右图的转子是被修改过以适合安装太阳轮的,为什么这么做,会在下节齿轮箱中提到。
使用本体驱动器的一大优点是,不需要额外的机械结构和昂贵的传感器就能做到力控。这是因为小减速箱的非线性误差可以忽略不计,因此直接使用电机的电流环和相应的减速比,就能得到驱动器端的输出扭矩。
下图是其电机的扭矩/电流特性,基本成较好的线性关系,在最大电流时有大致12%的误差。

左图:扭矩/电流特性 右图:扭矩常数/电流特性
- 齿轮箱
减速箱采用的是减速比6:1的行星齿轮减速方案(背隙0.005rad/0.28°),这里在机械上与电机集成的一个亮点是:电机被“嵌入“了行星齿轮箱中,注意下图的齿轮箱Sun和Planets位置。
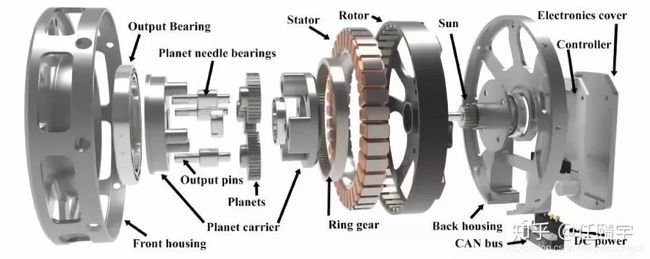
MIT Cheetah Mini驱动器的爆炸视图
以上的设计思路,就带来了一个极其紧凑、轻量化的驱动器整体集成效果,见下图:

使用到的相关齿轮箱和轴承的型号如下:
行星轮:Misumi GEFHB0.5-40-5-8-W3
太阳轮:Misumi GEABN0.5-20-8-K-4
Ring Gear: KHG SI0.5-100
Needle Bearing: HK0408
- 控制器
整体的电机控制器硬件层面的信息如下:
24V供电
40A峰值相电流(由于电机热力学限制,实际数值低于40A)
CAN总线通信
下发信息:力矩、位置、速度及位置和速度的增益
反馈信号:位置、速度以及基于电流环测量的扭矩
最大通信频率:4kHz/驱动器数目 (可通过增加CAN总线数目扩大通信带宽)
如下图的三相逆变器电路板设计

三相逆变器
如下图所示的来自AMS AS5047P霍尔传感器,测量电机位置信息,14 bit
集成霍尔传感器的驱动
整体驱动器性能参数
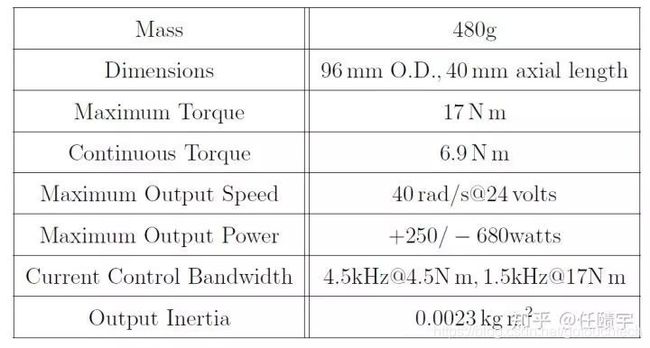
Actuator Specification
如果你在这里比较这代Cheetah Mini驱动器和Cheetah 2&3的驱动器:
Cheetah Mini: 最大功率/质量的输出密度:1417 watt/kg
Cheetah 2&3:最大功率/质量的输出密度:2400 watt/kg (这里参考Niaja Nichole Farve的PhD thesis)
可以看出,使用了商用电机的MIT Mini Cheetah驱动器的性能是不如MIT自研电机的驱动器的。其实同样能做很好后空翻是得益于尺寸效应,这个在文章最后会说到。
▌3.整体平台结构设计
1 首先是MIT Mini Cheetah的整体CAD渲染图:

MIT Cheetah Mini, CAD Rendering
整体结构设计就是遵循以下两原则:
- 减少腿部惯量和质量
- 增大腿部工作空间
为了减少惯量,采用较为常规的驱动器上置(远离地面)排布,单腿自由度分配为传统的Roll-Pitch-Pitch形式,设计如下图:
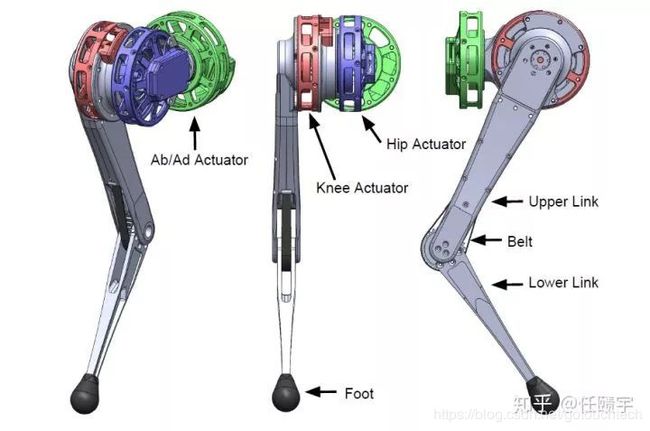
单腿的CAD
膝关节的Pitch驱动器上移排布之后,使用带传动,如下图:

膝关节带传动
为了减少自身质量,通过有限元分析着重进行了轻量化设计:
- 工字梁方案的小腿设计

大腿内部镂空设计

机器人身体由1.5 mm的AL 6061硬质铝组成

驱动器也采用镂空减重设计的Housing(为了减重丧心病狂,产品设计上的大忌,防尘防水)

最后MIT Mini Cheetah的腿部构型采用了现在较为主流的双手肘式(两腿膝盖朝向均向后),以增大腿部的工作空间。
▌4.尺寸效应
作者这里指的尺寸效应其实很简单:在关节式机器人爆发运动能力这方面,尺寸越大的机器人对驱动器的功率输出密度要求越高,技术实现也越困难。具体定量一点说:机器人尺寸假设扩大Lambda倍,那么相应质量是Lambda的3次方量级的增长,而所需要驱动扭矩则是Lambda的4次量级的增大。对于驱动器输出性能而言,增大机器人尺寸简直是噩梦,反之缩小机器人尺寸,能占很大的便宜。
这也解释了为什么MIT Mini Cheetah的驱动器输出性能(密度)不如Cheetah 2&3,但反而能做出更加惊艳后空翻的原因。这里需要提一下Benj的Master的工作做的很好,相应的驱动器性能在设计时是按照Cheetah 3的尺寸进行等比例缩小的,理论上密度应该一致,但实际实验后发现驱动器功率密度是小于原先的。
其实我们大自然也存在这样的情况:跳蚤能够跳跃其身长100多倍的高度,小猫小狗也能健步如飞,但是吨位比较大的大象则蹦跶一下都难。
我在这里简单收集了关于机器人跳跃的不同尺寸纬度和驱动原理的Demo:
Demo1
- 左上,UC Berkeley Salto 2: 45 g 微型尺寸 Electromagnet原理
- 右上,MIT Cheetah Mini: 9.5 kg 小尺寸 Electromagnet原理
- 左下,IIT eLeg: 35 kg 仿人型尺寸 Electromagnet原理
- 右下,BDI Atlas 2:75 kg 全人型尺寸 Hydraulic原理
如果从尺寸效应的角度来看驱动器能量密度,知道谁才是真正的王者了吧。
作者读了Benjamin G. Katz的硕士毕业论文之后,真心感概水准和平台之高,尽管没有核心去尝试解决驱动器能量密度的问题,但仍然是超一流水准的工作,而且是硕士生工作!并且MIT Cheetah整个队伍在硬件平台和代码的开放性上的态度十分值得敬佩——基本做到了开源,相应的设计细节和开源代码链接都在具体thesis之中,感兴趣可以下载。
PS: 本文行文仓促,属于读书笔记类型,如有错误和不足欢迎指正。
—— 完 ——