图像的Log-Polar极坐标变换
引言
本节介绍使用OpenCV 1.x如使 图像映射到极坐标实现。
预备知识
在opencv中,函数cvLogPolar功能是将图像映射到极坐标。
格式
/* Performs forward or inverse log-polar image transform */
CVAPI(void) cvLogPolar( const CvArr* src, CvArr* dst,
CvPoint2D32f center, double M,
int flags CV_DEFAULT(CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS));- src 源图像
- dst 目标图像
- center 变换中心,此处输出精度最高。
- M 幅度尺度参数
- flags:为插值方法标示与下面选项的组合:
- CV_WARP_FILL_OUTLIERS 填充目标图像中的所有像素,如果某些像素对应于源图像之我的位置,则用0填充.
- CV_WARP_INVERSE_MAP 表示矩阵是从目标图像到源图像的反变换,因此,可以直接用于像素插值;否则,函数从map_matrix寻找变换。
- CV_WARP_FILL_OUTLIERS 填充目标图像中的所有像素,如果某些像素对应于源图像之我的位置,则用0填充.
说明
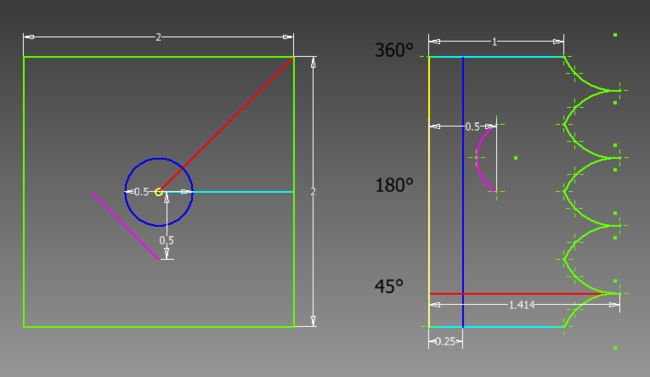
函数cvLogPolar使用如下变换公式对源图像进行变换。
- 正变换(未设置CV_WARP_INVERSE_MAP时): dst(phi,rho) ← src(x,y)
- 反变换(设置CV_WARP_INVERSE_MAP): dst(x,y) ← src(phi,rho)
其中, rho =M*log[sqrt(x2+y2)], phi = atan(y/x).
此函数可以用来模拟人类的中央视觉(foveal vision),并可以用于物体跟踪方面的尺度及旋转不变模板的快速匹配。
参考代码
OpenCV1.x版
IplImage *ImagePixel::ImageLogPolar(IplImage* pImg,int flags){
if(!pImg){
printf("Error:Load File in ImageLogPolar(..).\n");
exit(EXIT_FAILURE);
}
nWidth = pImg->width;
nHeight = pImg ->height;
IplImage* dst = cvCreateImage(cvGetSize(pImg),pImg->depth,pImg->nChannels);
cvLogPolar(pImg,dst,cvPoint2D32f(nWidth/2,nHeight/2),40,flags);
return dst;
}测试输出结果:



(a) 原始图像 (b) Log-Polar正变换 (b) Log-Polar 反变换
Python版
import sys
def on_mouse( event, x, y, flags, param ):
if( not src ):
return;
if event==CV_EVENT_LBUTTONDOWN:
cvLogPolar(src, dst, cvPoint2D32f(x,y), 40,
CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS );
cvLogPolar(dst, src2, cvPoint2D32f(x,y), 40,
CV_INTER_LINEAR+CV_WARP_FILL_OUTLIERS+CV_WARP_INVERSE_MAP );
cvShowImage( "log-polar", dst );
cvShowImage( "inverse log-polar", src2 );
if __name__ == "__main__":
filename = "test.jpg"
if len(sys.argv)>1:
filename=argv[1]
src = cvLoadImage(filename,1)
if not src:
print "Could not open %s" % filename
sys.exit(-1)
cvNamedWindow( "Original",0 );
cvNamedWindow( "Log-polar",0 );
cvNamedWindow( "inverse log-polar", 0 );
dst = cvCreateImage( cvSize(256,256), 8, 3 );
src2 = cvCreateImage( cvGetSize(src), 8, 3 );
cvSetMouseCallback( "original", on_mouse );
on_mouse( CV_EVENT_LBUTTONDOWN, src.width/2, src.height/2, None, None)
cvShowImage( "original", src );
cvWaitKey();关于Image Engineering & Computer Vision的更多讨论与交流,敬请关注本博和新浪微博songzi_tea.