ARM裸机的知识点总结---------5、汇编写启动代码之 关闭看门狗, 设置栈, 调用c程序, 开icache
Author: 想文艺一点的程序员
自动化专业 工科男
再坚持一点,再自律一点
CSDN@想文艺一点的程序员
来自朱有鹏嵌入式的学习笔记
目录
- 一、汇编写启动代码
- 1、arm裸机的编程思路
- 2、启动代码关闭看门狗
- (1)什么是看门狗
- (2)为什么要关看门狗
- (3)分析硬件物理特性、原理图、数据手册
- (4)找到看门狗关键性操作SFR(特殊功能寄存器)
- (5)启动代码start.s关看门狗
- 3、汇编写启动代码之设置栈
- (1)C语言运行时需要和栈的意义
- (2)C语言与栈的关系:
- (3)CPU模式和各种模式下的栈
- (4)查阅文档并设置栈指针至合法位置
- (5)栈的四种构成介绍:
- (6)代码如下:(往 sp 寄存器写入地址即可)
- 4、汇编程序调用c语言程序
- (1)汇编程序调用 bl led_blink
- (2).c文件编写 led_blink 函数。
- (a)用C 语言来访问寄存器。
- (3)makefile编译时添加-nostdlib
- 5、汇编写启动代码之开iCache
- (1)什么是cache,有什么用
- (2)cache的意义:
- (3)iROM中BL0对cache的操作
- (4)汇编代码读写cp15以开关icache (不需要理解,记住就好)
- (5)实验及实验结果
一、汇编写启动代码
1、arm裸机的编程思路
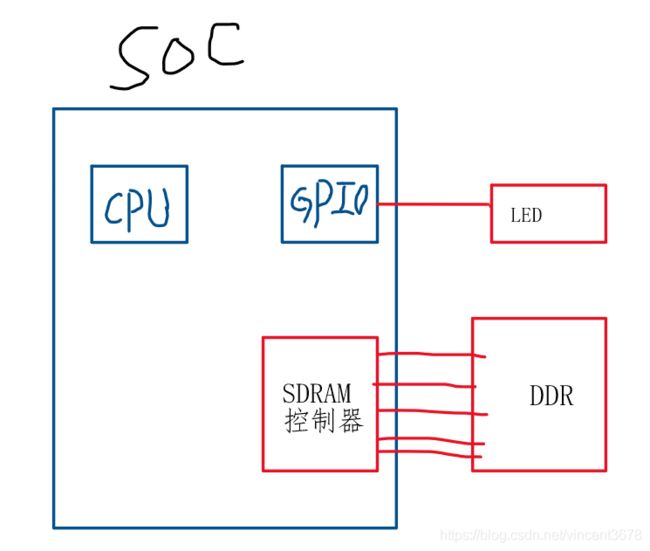
分析:SOC 内部有很多相应的控制器, 由寄存器来控制控制器,从而与外部的设备进行通讯。
2、启动代码关闭看门狗
(1)什么是看门狗
看门狗(watch dog timer 看门狗定时器)。大家想象这样一个场景:家门口有一只狗,这个狗定时会饿(譬如说2小时一饿),够饿了会胡乱咬死人。人进进出出要想保证安全必须提前喂狗(必须在上次喂过后的2小时内喂狗才行)。如果超时没喂狗就会被咬死,如果提前喂狗没关系,但是本次喂狗时间就会从这里开始计算。
现实中因为一些外部因素,电子设备经常会跑飞或者死机(譬如极端炎热、极端寒冷、工业复杂场合)。在这种情况下我们希望设备自动复位而不需要人工干预(无人值守)。看门狗用来完成这个工作。看门狗其实是我们SoC内部的一个定时器(类似于闹钟,类似于门口的狗),定好时间之后看门狗定时器会去计时,时间到之前(狗饿了之前)必须去重新置位看门狗定时器(喂狗),如果没有喂狗则系统会被强制复位。
系统在正常工作时,系统软件会自己去喂狗,所以看门狗定时器不会复位。但是系统一旦故障跑飞啥的,看门狗就没人喂了,然后下一个周期就会自动复位,达到我们期望的效果。
(2)为什么要关看门狗
一般CPU设计,在CPU启动后看门狗默认是工作的(为什么默认不关闭而要工作?我猜测是因为怕你的程序在启动代码前端就死机了或者跑飞了没人管),好处就是没有空当和漏洞,坏处就是在启动代码段我们不方便去喂狗(或者说懒得去喂狗)时看门狗会复位,所以为了偷懒我们就在启动代码前端先去关闭看门狗,然后在后面系统启动起来之后再根据需要决定是否要打开看门狗(一旦打开就必须同时提供喂狗)。
在S5PV210内部的iROM代码(BL0)中,其实已经关过看门狗了。所以我们的启动代码实际上是不用去关也没事的,也就是说今天写的关闭看门狗的代码运行后没有任何现象(没有现象就是正常现象).
很多CPU内部是没有BL0的,因此也没人给你关看门狗,都要在启动代码前段自己写代码关看门狗,所以今天学习的内容也是有价值的。
(3)分析硬件物理特性、原理图、数据手册
物理特性上看门狗其实是个定时器(跟现实中的闹钟类似),硬件上就是SoC内部的一个内部外设。
原理图:看门狗不用分析原理图,因为看门狗属于内部外设,且没有外部相关的原件与他有关,所以不需要原理图分析,原理图上根本找不到和看门狗有关的地方。
数据手册:在数据手册的Section7.3,大家可以详细来看。如果直接看不懂数据手册,可以百度看门狗,然后看别人的博客来学习。
(4)找到看门狗关键性操作SFR(特殊功能寄存器)
WTCON(watch dog control)(0xE2700000),其中bit5是看门狗的开关:0代表关,1代表开。
(5)启动代码start.s关看门狗
/*
* 文件名: start.s
* 描述: 演示汇编关看门狗
*/
#define WTCON 0xE2700000 //看门狗的控制寄存器地址
.global _start // 把_start链接属性改为外部,这样其他文件就可以看见_start了
_start:
// 第1步:关看门狗(向WTCON的bit5写入0即可)
ldr r0, =WTCON
ldr r1, =0x00
str r1, [r0]
3、汇编写启动代码之设置栈
(1)C语言运行时需要和栈的意义
“C语言运行时(runtime)”需要一定的条件,这些条件由汇编来提供。C语言运行时主要是需要栈。
(2)C语言与栈的关系:
C语言中的局部变量都是用栈来实现的。如果我们汇编部分没有给C部分预先设置合理合法的栈地址,那么C代码中定义的局部变量就会落空,整个程序就死掉了。
我们平时在编写单片机程序(譬如51单片机)或者编写应用程序时并没有去设置栈,但是C程序还是可以运行的。原因是:在单片机中由硬件初始化时提供了一个默认可用的栈,
在应用程序(pc程序)中我们编写的C程序其实并不是全部,编译器(gcc)在链接的时候会帮我们自动添加一个头,这个头就是一段引导我们的C程序能够执行的一段汇编实现的代码,这个代码中就帮我们的C程序设置了栈及其他的运行时需要。
(3)CPU模式和各种模式下的栈
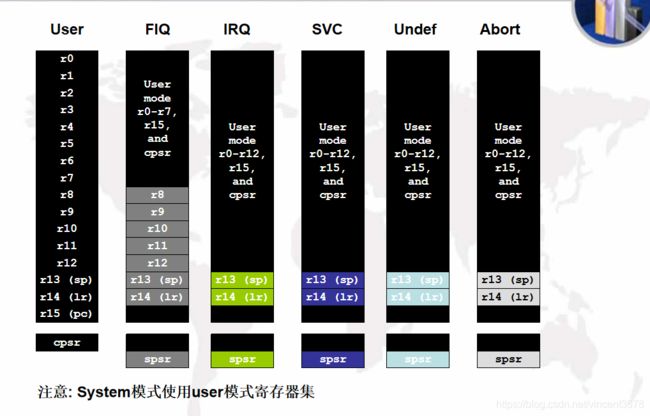
在ARM中37个寄存器中,每种模式下都有自己的独立的SP寄存器(r13),为什么这么设计?
如果各种模式都使用同一个SP,那么就意味着整个程序(操作系统内核程序、用户自己编写的应用程序)都是用一个栈的。你的应用程序如果一旦出错(譬如栈溢出),就会连累操作系统的栈也损坏,整个操作系统的程序就会崩溃。这样的操作系统设计是非常脆弱的,不合理的。
解决方案就是各种模式下用不同的栈。我的操作系统内核使用自己的栈,每个应用程序也使用自己独立的栈,这样各是各的,一个损坏不会连累其他人。
我们现在要设置栈,不可能也懒的而且也没有必要去设置所有的栈,我们先要找到自己的模式,然后设置自己的模式下的栈到合理合法的位置,即可。
注意:系统在复位后默认是进入SVC模式的。
我们如何访问SVC模式下的SP呢?
很简单,先把模式设置为SVC,再直接操作SP。但是因为我们复位后就已经是SVC模式了,所以直接设置SP即可。
(4)查阅文档并设置栈指针至合法位置
栈必须是当前一段可用的内存(可用的意思是这个地方必须有被初始化过可以访问的内存,而且这个内存只会被我们用作栈,不会被其他程序征用)
当前CPU刚复位(刚启动),外部的DRRAM尚未初始化,目前可用的内存只有内部的SRAM(因为它不需初始化即可使用)。
因此我们只能在SRAM中找一段内存来作为SVC的栈。在ARM中,ATPCS(ARM关于程序应该怎么实现的一个规范)要求使用满减栈,所以不出意外都是用满减栈。查阅开发板资料可知道:
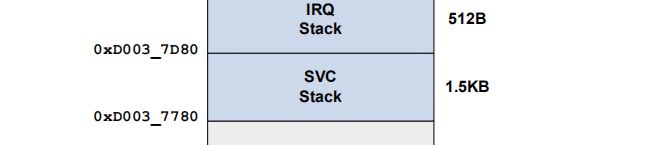
我们的 iROM 有 96K。就已经给我们分配好了 SVC 的栈。
(5)栈的四种构成介绍:
满栈: 进栈:先移动指针再存; 出栈:先出数据再移动指针
空栈: 进栈:先存再移动指针; 出栈:先移动指针再出数据
减栈: 进栈:指针向下移动; 出栈:指针向上移动
增栈: 进栈:指针向上移动; 出栈:指针向下移动
通过这四种构成四种栈的类型,即满增栈、满减栈、空增栈、空减栈。
注:理解满和空: 就是指当前栈指针指向的 内存格子是否有数据。
在ARM中,ATPCS(ARM关于程序应该怎么实现的一个规范)要求使用满减栈,所以不出意外都是用满减栈(地址向下增长)
结合iROM_application_note中的memory map,可知SVC栈应该设置为0xd0037D80
(6)代码如下:(往 sp 寄存器写入地址即可)
/*
* 文件名: start.s
* 描述: 演示汇编设置栈
*/
#define WTCON 0xE2700000
#define SVC_STACK 0xd0037d80
.global _start // 把_start链接属性改为外部,这样其他文件就可以看见_start了
_start:
// 第1步:关看门狗(向WTCON的bit5写入0即可)
ldr r0, =WTCON
ldr r1, =0x0
str r1, [r0]
// 第2步:设置SVC栈
ldr sp, =SVC_STACK
// 从这里之后就可以开始调用C程序了
4、汇编程序调用c语言程序
(1)汇编程序调用 bl led_blink
/*
* 文件名: start.s
* 描述: 演示汇编设置栈并且调用C语言程序来点亮LED
*/
#define WTCON 0xE2700000
#define SVC_STACK 0xd0037d80
.global _start // 把_start链接属性改为外部,这样其他文件就可以看见_start了
_start:
// 第1步:关看门狗(向WTCON的bit5写入0即可)
ldr r0, =WTCON
ldr r1, =0x0
str r1, [r0]
// 第2步:设置SVC栈
ldr sp, =SVC_STACK
// 从这里之后就可以开始调用C程序了
bl led_blink // led_blink是C语言实现的一个函数
// 汇编最后的这个死循环不能丢
b .
(2).c文件编写 led_blink 函数。
#define GPJ0CON 0xE0200240
#define GPJ0DAT 0xE0200244
#define rGPJ0CON *((volatile unsigned int *)GPJ0CON)
#define rGPJ0DAT *((volatile unsigned int *)GPJ0DAT)
void delay(void);
// 该函数要实现led闪烁效果
void led_blink(void)
{
// led初始化,也就是把GPJ0CON中设置为输出模式
rGPJ0CON = 0x11111111;
while (1)
{
// led亮
rGPJ0DAT = ((0<<3) | (0<<4) | (0<<5));
// 延时
delay();
// led灭
rGPJ0DAT = ((1<<3) | (1<<4) | (1<<5));
// 延时
delay();
}
}
void delay(void)
{
volatile unsigned int i = 900000; // volatile 让编译器不要优化,这样才能真正的减
while (i--); // 才能消耗时间,实现delay
}
(a)用C 语言来访问寄存器。
将一个整数变为一个指针
#define GPJ0CON 0xE0200240
#define GPJ0DAT 0xE0200244
unsigned int *p = (unsigned int *)GPJ0CON;
unsigned int *p1 = (unsigned int *)GPJ0DAT;
#define GPJ0CON 0xE0200240
#define GPJ0DAT 0xE0200244
#define rGPJ0CON *((volatile unsigned int *)GPJ0CON)
#define rGPJ0DAT *((volatile unsigned int *)GPJ0DAT)
利用指针来访问寄存器(对指针的解引用)
*p = 0x11111111;
上述代码执行过程中出现连接时的报错:
undefined reference to `__aeabi_unwind_cpp_pr1’
(3)makefile编译时添加-nostdlib
%.o : %.S
arm-linux-gcc -o $@ $< -c -nostdlib
%.o : %.c
arm-linux-gcc -o $@ $< -c -nostdlib
5、汇编写启动代码之开iCache
(1)什么是cache,有什么用
cache是一种内存,叫高速缓存。
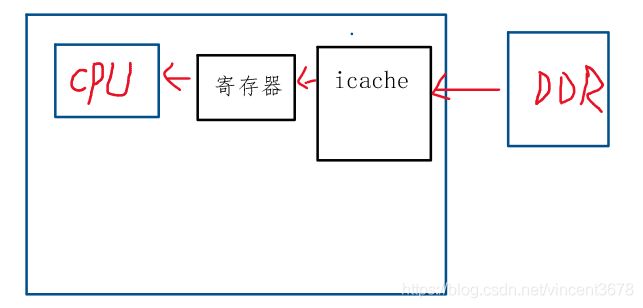
从容量来说:CPU < 寄存器 < cache < DDR
从速度来说:CPU > 寄存器 > cache > DDR
cache的存在,是因为寄存器和ddr之间速度差异太大,ddr的速度远不能满足寄存器的需要(不能满足cpu的需要,所以没有cache会拉低整个系统的整体速度)
整个系统中CPU的供应链由:寄存器+cache+DDR+硬盘/flash四阶组成,这是综合考虑了性能、成本后得到的妥协的结果。
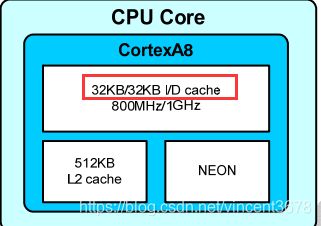
210内部有32KB icache和32kb dcache。
icache是用来缓存指令的;
dcache是用来缓存数据的。
(2)cache的意义:
指令平时是放在硬盘/flash中的,运行时读取到DDR中,再从DDR中读给寄存器,再由寄存器送给cpu。
但是DDR的速度和寄存器(代表的就是CPU)相差太大,如果CPU运行完一句再去DDR读取下一句,那么CPU的速度完全就被DDR给拖慢了。
解决方案就是icache。
icache工作时,会把我们CPU正在运行的指令的旁边几句指令事先给读取到icache中
(CPU设计有一个基本原理:代码执行时,下一句执行当前一句代码旁边代码的可能性要大很多)。
当下一句CPU要指令时,cache首先检查自己事先准备的缓存指令中有没这句,如果有就直接拿给CPU,如果没有则需要从DDR中重新去读取拿给CPU,并同时做一系列的动作:清缓存、重新缓存。
(3)iROM中BL0对cache的操作
首先,icache的一切动作都是自动的,不需人为干预。我们所需要做的就是打开/关闭icache。
其次,在210的iROM中BL0已经打开了icache。所以之前看到的现象都是icache打开时的现象。
(4)汇编代码读写cp15以开关icache (不需要理解,记住就好)
mrc p15,0,r0,c1,c0,0; // 读出cp15的c1到r0中
bic r0, r0, #(1<<12) // bit12 置0 关icache
orr r0, r0, #(1<<12) // bit12 置1 开icache
mcr p15,0,r0,c1,c0,0;
(5)实验及实验结果
实验结果分析:
结论1:irom中确实是打开了icache的。
结论2:icache关闭确实比icache打开时led闪烁变慢,说明指令执行速度变慢。