本系列文章由 @YhL_Leo 出品,转载请注明出处。
文章链接: http://blog.csdn.net/yhl_leo/article/details/49427383
Opencv中Camera Calibration and 3D Reconstruction中使用的是Z. Zhang(PAMI, 2000). A Flexible New Technique for Camera Calibration的方法。原理见原理简介(五)本文将对其进行介绍。
1 标定步骤
简单来说,Opencv中基于二维标定平面的标定方法主要步骤有:
- 1 读取相关设置信息,包括采用的pattern 信息(类型,尺寸),输入标定数据的信息(图像列表文件,视频采样方法),输出文件设置等,这些信息可以存为XML或YAML文件的形式或者在代码里直接显示设置。这里给出Opencv中提供的configuration file:
<opencv_storage>
<Settings>
<BoardSize_Width>9BoardSize_Width>
<BoardSize_Height>6BoardSize_Height>
<Square_Size>50Square_Size>
<Calibrate_Pattern>"CHESSBOARD"Calibrate_Pattern>
<Input>"images/CameraCalibraation/VID5/VID5.xml"Input>
<Input_FlipAroundHorizontalAxis>0Input_FlipAroundHorizontalAxis>
<Input_Delay>100Input_Delay>
<Calibrate_NrOfFrameToUse>25Calibrate_NrOfFrameToUse>
<Calibrate_FixAspectRatio>1Calibrate_FixAspectRatio>
<Calibrate_AssumeZeroTangentialDistortion>1Calibrate_AssumeZeroTangentialDistortion>
<Calibrate_FixPrincipalPointAtTheCenter>1Calibrate_FixPrincipalPointAtTheCenter>
<Write_outputFileName>"out_camera_data.xml"Write_outputFileName>
<Write_DetectedFeaturePoints>1Write_DetectedFeaturePoints>
<Write_extrinsicParameters>1Write_extrinsicParameters>
<Show_UndistortedImage>1Show_UndistortedImage>
Settings>
opencv_storage>其中,图像文件列表images/CameraCalibraation/VID5/VID5.xmlOpencv中采用列举法:
<opencv_storage>
<images>
images/CameraCalibraation/VID5/xx1.jpg
images/CameraCalibraation/VID5/xx2.jpg
images/CameraCalibraation/VID5/xx3.jpg
images/CameraCalibraation/VID5/xx4.jpg
images/CameraCalibraation/VID5/xx5.jpg
images/CameraCalibraation/VID5/xx6.jpg
images/CameraCalibraation/VID5/xx7.jpg
images/CameraCalibraation/VID5/xx8.jpg
images>
opencv_storage>文件中参数的含义比较清晰明了,此处就不累述。
- 2 依次从图像中检测pattern信息,如果检测成功,角点信息将会存储记录,用于标定解算。
cv::Mat viewGray;
if ( view.channels() == 3 )
cv::cvtColor( view, viewGray, CV_BGR2GRAY );
else
view.copyTo( viewGray );
std::vector- 3 优化角点检测精度,将上述检测成功的角点,通过精确角点定位方法,提高精度,下图为Opencv提供的检测结果。
cv::cornerSubPix( viewGray,
imagePoints,
cv::Size(11,11),
cv::TermCriteria( CV_TERMCRIT_EPS+CV_TERMCRIT_ITER, 30, 0.1 ));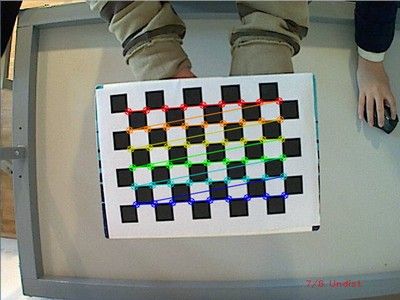
- 4 标定解算,每幅图像都进行上述的角点检测后,一般给像点对应的物方角点虚拟坐标的方式赋予对应的坐标,即可进行相机标定解算,包括相机内参,相机畸变系数,以及相机在虚拟坐标所在坐标系中相对于每幅图像的相对位置姿态(旋转向量和平移向量)。
double reprojectionError= cv::calibrateCamera(
objectPoints, // calibration pattern points in the calibration pattern coordinate space
imagePoints, // projections of calibration pattern points
imageSize, // Size of the image used only to initialize the intrinsic camera matrix
cameraMatrix, // camera matrix A
distCoeffs, // distortion coefficients (k1,k2,p1,p2[,k3[,k4,k5,k6]])
rvecs, // rotation vectors
tvecs, // translation vectors
flag, // different calibration model
criteria); // Termination criteria for iterative optimization algorithm5 标定精度评估,为了评价标定后的结果,可以按照标定得到的相机成像模型,由像点反算出物方空间坐标,进而得到一系列点云,通过对比解算点云与虚拟点云之间的差异性,就可以知道获得模型的好坏(严格来讲,如果误差较小,两者基本应该是一致的)。
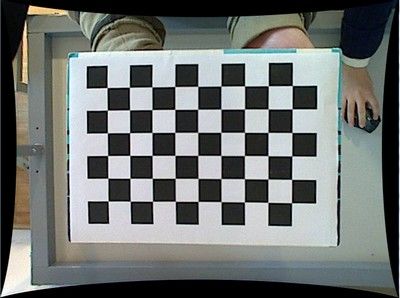
6 图像畸变校正,在opencv示例中,作为标定的最后一个步骤,但是个人认为,这个应该可以作为一个相机标定后的副产品,对于处理的图像产品精度要求较高时,可以先进行畸变校正,再投入生产。下图为Opencv提供的畸变校正结果。
2 代码及结果
下面是个人的代码程序,有些部分并没完全按照Opencv的做法:
/*
Calibrate camera with chess board pattern.
- Editor: Menghan Xia, Yahui Liu.
- Data: 2015-07-28
- Email: [email protected]
- Address: Computer Vision and Remote Sensing(CVRS) Lab, Wuhan University.
**/
#includestring graphpath = folderPath;
graphpath += "/" + graphPaths[i];
curGraph = cv::imread(graphpath);
if ( curGraph.channels() == 3 )
cv::cvtColor( curGraph, gray, CV_BGR2GRAY );
else
curGraph.copyTo( gray );
// for every image, empty the corner list
std::vectorfor ( int i=0; ifor ( int j=0; j0;
objectPoints.push_back(point3D);
}
}
seqObjectPoints.push_back(objectPoints);
}
double reprojectionError = calibrateCamera(
seqObjectPoints,
seqCorners,
image_size,
cameraMatrix,
distCoeffs,
seqRotation,
seqTranslation,
CV_CALIB_FIX_ASPECT_RATIO|CV_CALIB_FIX_PRINCIPAL_POINT );
#ifdef DEBUG_OUTPUT_INFO
std::cout << "Calibration done!" << std::endl;
#endif
// calculate the calibration pattern points with the camera model
std::vectordouble >> projectMats;
for ( int i=0; idouble> R, T;
// translate rotation vector to rotation matrix via Rodrigues transformation
cv::Rodrigues( seqRotation[i], R );
T = cv::Mat( cv::Matx31d(
seqTranslation[i][0],
seqTranslation[i][1],
seqTranslation[i][2]) );
cv::Mat_<double> P = cameraMatrix * cv::Mat( cv::Matx34d(
R(0,0), R(0,1), R(0,2), T(0),
R(1,0), R(1,1), R(1,2), T(1),
R(2,0), R(2,1), R(2,2), T(2) ) );
projectMats.push_back(P);
}
std::vectorfor ( int j=0; j// calculate calibration pattern points
cv::Point3d objectPoint = calAssist.triangulate(projectMats,PointSet);
objectClouds.push_back(objectPoint);
}
std::string pathTemp_point;
pathTemp_point = folderPath;
pathTemp_point += "/point.txt";
calAssist.save3dPoint(pathTemp_point,objectClouds);
std::string pathTemp_calib;
pathTemp_calib = folderPath;
pathTemp_calib += "/calibration.txt";
FILE* fp = fopen( pathTemp_calib.c_str(), "w" );
fprintf( fp, "The average of re-projection error : %lf\n", reprojectionError );
for ( int i=0; istd::vectorstd::sqrt((errorList[j].x - corners[j].x)*(errorList[j].x - corners[j].x) +
(errorList[j].y - corners[j].y)*(errorList[j].y - corners[j].y));
}
rotation.clear();
translation.clear();
rotation = seqRotation[i];
translation = seqTranslation[i];
fprintf( fp, "Re-projection of image %d:%lf\n", i+1, meanError/corners.size() );
fprintf( fp, "Rotation vector :\n" );
fprintf( fp, "%lf %lf %lf\n", rotation[0], rotation[1], rotation[2] );
fprintf( fp, "Translation vector :\n" );
fprintf( fp, "%lf %lf %lf\n\n", translation[0], translation[1], translation[2] );
}
fprintf( fp, "Camera internal matrix :\n" );
fprintf( fp, "%lf %lf %lf\n%lf %lf %lf\n%lf %lf %lf\n",
cameraMatrix(0,0), cameraMatrix(0,1), cameraMatrix(0,2),
cameraMatrix(1,0), cameraMatrix(1,1), cameraMatrix(1,2),
cameraMatrix(2,0), cameraMatrix(2,1), cameraMatrix(2,2));
fprintf( fp,"Distortion coefficient :\n" );
for ( int k=0; kfprintf( fp, "%lf ", distCoeffs[k] );
#ifdef DEBUG_OUTPUT_INFO
std::cout << "Results are saved!" << std::endl;
#endif
}
}
} // toolFunction.h
#ifndef TOOL_FUNCTION_H
#pragma once
#define TOOL_FUNCTION_H
#includedouble >> &ProjectMats,
std::vector// toolFunction.cpp
#include "toolFunction.h"
std::vector<std::string> CalibrationAssist::get_filelist( std::string foldname )
{
foldname += "/*.*";
const char * mystr=foldname.c_str();
std::vector<std::string> flist;
std::string lineStr;
std::vector<std::string> extendName;
extendName.push_back("jpg");
extendName.push_back("JPG");
extendName.push_back("bmp");
extendName.push_back("png");
extendName.push_back("gif");
HANDLE file;
WIN32_FIND_DATA fileData;
char line[1024];
wchar_t fn[1000];
mbstowcs( fn, mystr, 999 );
file = FindFirstFile( fn, &fileData );
FindNextFile( file, &fileData );
while(FindNextFile( file, &fileData ))
{
wcstombs( line, (const wchar_t*)fileData.cFileName, 259);
lineStr = line;
// remove the files which are not images
for (int i = 0; i < 4; i ++)
{
if (lineStr.find(extendName[i]) < 999)
{
flist.push_back(lineStr);
break;
}
}
}
return flist;
}
cv::Point3d CalibrationAssist::triangulate(
std::vectordouble >> &ProjectMats,
std::vector
使用数据为9张1200×800的图像:
程序运行结果:
1 运行控制台输出结果

2 角点检测图

- 3 反投影点云(CloudCompare显示)

对于上述结果的生成文件,此处用了C语言写成txt的方式,读者完全可以考虑使用XML或YAML格式文件保存,至于畸变纠正的问题,也很简单,直接利用标定得到的相机内参和畸变系数,查询remap函数的使用方法即可。此外,处理较大图像时,Opencv提供的方法速度可能会较慢,遇到这种情况,可以考虑把图像缩小或重写角点检测算法。