- 亲测centos7安装docker可用
a4132447
云原生dockerlinux运维
1.配置yum下载源为aliyun源yum-config-manager--add-repohttps://mirrors.aliyun.com/docker-ce/linux/centos/docker-ce.repo备份当前的yum源mv/etc/yum.repos.d/CentOS-Base.repo/etc/yum.repos.d/CentOS-Base.repo.backup下载新的Ce
- Ubuntu 常用快捷键及操作技巧
YsDynamic
ubuntulinux运维操作系统
Ubuntu是一种流行的Linux操作系统,拥有许多强大的功能和快捷键,可以提高工作效率。本文将详细介绍一些常用的Ubuntu快捷键和操作技巧,帮助您更好地利用Ubuntu。终端快捷键Ubuntu的终端是一个强大的工具,可以通过快捷键加快命令行操作。Ctrl+Alt+T:打开一个新的终端窗口。Ctrl+Shift+T:在当前终端窗口中打开一个新的选项卡。Ctrl+Shift+W:关闭当前终端选项卡
- RHEL 安装 Hadoop 服务器
XhClojure
hadoop服务器大数据
在这篇文章中,我们将探讨如何在RedHatEnterpriseLinux(RHEL)上安装和配置Hadoop服务器。Hadoop是一个开源的分布式数据处理框架,用于处理大规模数据集。以下是在RHEL上安装Hadoop的详细步骤。步骤1:安装Java在安装Hadoop之前,我们需要确保系统上安装了JavaDevelopmentKit(JDK)。执行以下命令安装JDK:sudoyuminstallja
- 市场波动中的数据分析与策略优化
QQ3990385023
数据分析区块链人工智能
市场波动中的数据分析与策略优化在市场交易中,价格的波动往往受到多种因素影响,包括资金流向、经济数据、政策调整等。如何利用数据分析优化交易策略,提升市场适应能力,是投资者需要重点关注的问题。借助科学的分析方法,结合技术指标,可以更精准地识别趋势,提高交易稳定性。一、市场数据分析的核心要素1.价格趋势分析市场价格的变动通常会形成一定的趋势,例如上涨趋势、震荡趋势或下跌趋势。通过均线(MA)等技术指标,
- 100道计算机网络面试八股文(答案、分析和深入提问)整理
守护海洋的猫
计算机网络面试职场和发展pythondjango
1.说一说POST与GET有哪些区别回答在计算机网络中,POST和GET是HTTP协议中两种主要的请求方法,它们各自具有不同的特性和用途。下面是二者的主要区别:1.数据传输方式GET:数据通过URL传递,参数以查询字符串的形式附加在URL后面。示例:http://example.com/api?name=value&age=30POST:数据包含在HTTP请求的主体部分,数据不会显示在URL中。示
- 2024亚马逊数据分析!
KJYHS
数据分析数据挖掘
整体财务数据23净销售额:全年净销售额达6380亿美元,同比增长11%。净利润:全年净利润为592亿美元,较上年同期的304亿美元增长95%。经营活动现金流:经营活动现金流达1159亿美元,同比增加了36%。各业务板块数据AWS业务1第四季度营收:2024年第四季度,AWS业务实现营收288亿美元,同比增长19%;经营利润达106亿美元,同比增长34亿美元。广告业务5全年营收:2024年广告业务总
- 使用python计算等比数列求和的方法
HAMYHF
windows
在python中,计算Sum=m+mm+mmm+mmmm+.....+mmmmm.....,输入两个数m,n。m的位数累加到n的值,列出算式并计算出结果:#为了打印出算式,并计算出结果,将m,mm这些放入到列表中#定义列表中的m初始值为0,用Ele来代表m,mm....Ele=0#定义总和为0Sum=0#定义一个空列表List=[]#输入两个值n=int(input("inputadigit:")
- Python+Playwright常用元素定位方法
HAMYHF
python功能测试
CSSselector选择器在CSS中,定位元素主要通过选择器完成,以下是几种常见的CSS选择器定位方法:标签选择器(element):直接使用HTML元素名称来定位,例如p会选择所有段落元素。属性选择器(attribute):选择所有具有指定属性的元素,无论该属性的值是什么。例如,[title]会选择所有包含title属性的元素。选择具有指定属性,并且该属性值完全等于给定值的元素。例如,[typ
- 【Go语言快速上手】第二部分:Go语言进阶之测试与性能优化
卜及中
Golanggolang性能优化log4j
文章目录前言:测试和性能优化一、编写单元测试和基准测试1.1单元测试1.1.1示例:编写单元测试1.2基准测试1.2.1示例:编写基准测试二、使用pprof进行性能分析2.1启用pprof2.1.1示例:启用pprof2.2使用pprof工具分析性能2.2.1示例:生成CPU性能报告2.2.2示例:生成内存使用报告2.3分析报告三、代码优化技巧3.1减少内存分配3.1.1示例:重用切片3.2避免锁
- 壁纸样机神器:快速生成个性化壁纸,提升你的设备颜值
2401_89910411
人工智能
在数字化时代,壁纸不仅是设备的装饰,更是个人风格的展示。想要快速制作出精美的壁纸吗?壁纸样机神器来帮你!这款工具集多种功能于一身,让你轻松成为壁纸设计师。一、功能亮点1.一键生成高清壁纸壁纸样机神器支持多种图片格式的上传,无论是你从网上下载的图片,还是自己拍摄的照片,都可以轻松导入。上传后,系统会自动适配高清分辨率,确保壁纸在任何设备上都能完美展示。2.智能模板库平台提供了丰富的模板选择,涵盖从极
- 图像识别与应用
狂踹瘸子那条好脚
python
图像识别作为人工智能领域的重要分支,近年来取得了显著进展,其中卷积神经网络(CNN)功不可没。CNN凭借其强大的特征提取能力,在图像分类、目标检测、人脸识别等任务中表现出色,成为图像识别领域的核心技术。一、卷积神经网络:图像识别的利器CNN是一种专门处理网格状数据的深度学习模型,其结构设计灵感来源于生物视觉系统。与全连接神经网络不同,CNN通过卷积层、池化层等结构,能够有效提取图像的局部特征,并逐
- Mamba超绝创新!搭上异常检测准确率99%+!一区秒了!
人工智能学起来
人工智能深度学习
今天给大家推荐一个创新Max,且不卷的idea:基于Mamba做异常检测!以往的异常检测方法,以基于CNN、Transformer为主。但CNN在处理长距离依赖性方面存在困难,Transformer虽然表现出色,但由于其自注意力机制,计算复杂度较高。而Mamba,则完美弥补了这两者的缺陷,在有效处理长距离依赖性同时,具有线性复杂度,计算资源需求少!在提高模型检测精度和速度方面,一骑绝尘!比如模型A
- 如何安装配置虚拟机
薇晶晶
hadoop大数据分布式
1.CentOS-7-x86_64-Minimal-2009.iso:linux安装文件。用来安装系统。2.VMware17.6.exe:虚拟机软件。用来在自己的电脑上安装虚拟机。它调用CentOS-7-x86_64-Minimal-2009.iso来安装操作系统.3.VC_redist.x86.exe:系统补丁。如果安装VMware17.6时,提示缺少文件,再来安装它,否则不用。4.finals
- 从开发到部署,搭建离线私有大模型知识库_离线大模型
ai大模型应用开发
数据库服务器linux语言模型人工智能自然语言处理深度学习
文末有福利!背景介绍最近一段时间搭建了一套完整的私有大模型知识库,目前完整的服务已经完成测试部署上线。基本之前的实践过程,从工程角度整理技术方案以及中间碰到的一些问题,方便后续对这个方向有需求的研发同学们。为什么做离线私有化部署在大模型火热起来之后,很多企业都有尝试相关服务。但是实际会碰到大模型不了解公司个性化的情况,无法针对公司情况给出个性化回答。因此就出现了针对大模型的知识库,通过提供公司内部
- 大模型如何改变教育?典型应用场景的探究与展望!
AGI大模型学习
大模型应用人工智能AI产品经理llama大模型AI大模型教程
目前,大模型在教育领域的应用主要体现在个性化学习助手、智能问答系统、内容生成与创作辅助、智能写作评估、跨语言学习支持、数学解题辅助等几个方面。大模型技术在教育领域凭借卓越的数据处理能力和深度学习技术,极大推动了教育质量的提升与教育公平的实现。分级分类的教育数据助力大模型发展在构建与优化大模型的过程中,教育数据能够帮助我们更精准地理解教育现象,更有质量地辅助教学。教育数据涵盖广泛,包括但不限于学生的
- Python中的 redis keyspace 通知_python 操作redis psubscribe(‘__keyspace@0__ ‘)
2301_82243733
程序员python学习面试
最后Python崛起并且风靡,因为优点多、应用领域广、被大牛们认可。学习Python门槛很低,但它的晋级路线很多,通过它你能进入机器学习、数据挖掘、大数据,CS等更加高级的领域。Python可以做网络应用,可以做科学计算,数据分析,可以做网络爬虫,可以做机器学习、自然语言处理、可以写游戏、可以做桌面应用…Python可以做的很多,你需要学好基础,再选择明确的方向。这里给大家分享一份全套的Pytho
- Python数据分析与可视化
程序媛小果
pythonpython数据分析开发语言
Python数据分析与可视化在数据驱动的商业世界中,数据分析和可视化成为了理解复杂数据集、做出明智决策的关键工具。Python,作为一种功能强大且易于学习的编程语言,提供了丰富的库和框架,使得数据分析和可视化变得简单高效。本文将探讨Python在数据分析和可视化中的应用,包括数据预处理、分析、以及如何通过可视化工具将数据洞察转化为可操作的策略。1.数据分析的重要性数据分析是提取数据中有用信息的过程
- JavaScript网页设计案例:打造交互式个人简历网站
程序媛小果
前端javascript开发语言ecmascript
在当今数字化时代,个人简历不再局限于纸质文档,而是越来越多地以网页形式呈现。JavaScript作为一种强大的客户端脚本语言,为网页设计提供了无限可能,使得网页不仅仅是静态的信息展示,而是具有丰富交互性的平台。本文将通过一个案例,展示如何使用HTML、CSS和JavaScript来设计一个交互式的个人简历网站。1.项目概述本案例的目标是创建一个个人简历网站,它不仅展示个人信息、工作经历、教育背景和
- ECMAScript与JavaScript:探索两者之间的联系与区别
程序媛小果
前端ecmascriptjavascript前端
在Web开发的早期,JavaScript成为了客户端脚本语言的代名词,而随着时间的推移,JavaScript已经发展成为一个功能强大的语言,它的影响力远远超出了浏览器的范畴。在这场语言演进的过程中,ECMAScript扮演了一个关键角色。本文将深入探讨ECMAScript与JavaScript之间的关系,以及它们之间的主要区别。1.什么是ECMAScript?ECMAScript是由欧洲计算机制造
- 使用 Docker 基本命令创建并发布带有新功能的镜像到阿里云
2021级计算机网络技术2班梁嘉敏
docker阿里云容器
1.关于Docker镜像1.基础假定您在开发一个网上商城,您使用的是一台笔记本电脑而且您的开发环境具有特定的配置。其他开发人员身处的环境配置也各有不同。您正在开发的应用依赖于您当前的配置且还要依赖于某些配置文件。此外,您的企业还拥有标准化的测试和生产环境,且具有自身的配置和一系列支持文件。您希望尽可能多在本地模拟这些环境而不产生重新创建服务器环境的开销。请问?您要如何确保应用能够在这些环境中运行和
- 【Java基础】Java 中的 super 关键字
李少兄
Javajava开发语言
前言在Java的面向对象编程中,继承是一个核心特性,它允许我们创建一个新类(子类)来继承另一个已有类(父类)的属性和方法。而super关键字则是在这个继承体系中扮演着至关重要的角色,它为子类与父类之间的交互提供了强大的支持。1.super关键字的基本概念super关键字是Java中的一个引用变量,它指向当前对象的父类对象。通过super,子类可以访问父类的成员,包括成员变量、方法和构造器。在子类中
- 代理IP助力AI图像处理,开启行业新篇章
傻啦嘿哟
关于代理IP那些事儿人工智能tcp/ip图像处理
目录一、代理IP技术简介二、代理IP在AI图像处理中的应用1.提升数据访问速度2.增强数据处理能力3.突破网络限制三、代理IP在AI图像处理中的实际案例案例一:AI图像生成软件案例二:AI动画创作四、代理IP技术的未来展望五、结语在科技日新月异的今天,AI图像处理技术以其广泛的应用前景和强大的处理能力,正深刻改变着我们的世界。从人脸识别、自动驾驶到医学影像分析,AI图像处理技术无处不在,发挥着不可
- DeepSeek原理介绍以及对网络安全行业的影响
AI拉呱
Deepseek人工智能
大家好,我是AI拉呱,一个专注于人工智领域与网络安全方面的博主,现任资深算法研究员一职,兼职硕士研究生导师;热爱机器学习和深度学习算法应用,深耕大语言模型微调、量化、私域部署。曾获多次获得AI竞赛大奖,拥有多项发明专利和学术论文。对于AI算法有自己独特见解和经验。曾辅导十几位非计算机学生转行到算法岗位就业。关注评审分享一起学习更多知识。1.DeepSeek公司介绍1.1DeepSeek是什么:wh
- 动态蛇形卷积在YOLOv8中的探索与实践:提高目标识别与定位精度
向哆哆
YOLO目标跟踪深度学习YOLOv8
文章目录动态蛇形卷积在YOLOv8中的探索与实践:提高目标识别与定位精度1.什么是动态蛇形卷积?2.YOLOv8的卷积改进2.1常规卷积与动态蛇形卷积的区别2.2动态蛇形卷积的实现原理2.3YOLOv8中集成动态蛇形卷积3.手把手实现动态蛇形卷积3.1安装依赖3.2设计动态蛇形卷积层3.3集成到YOLOv8中3.4训练与优化4.动态蛇形卷积的进一步优化4.1蛇形路径的动态学习4.1.1学习动态路径
- Ubuntu终端的常用快捷键
狗头鹰
ubuntulinux
基础常用快捷键Tab:自动补全命令或文件名。Ctrl+A:将光标移动到命令行的开始位置。Ctrl+E:将光标移动到命令行的末尾。Ctrl+K:删除从光标位置到命令行末尾的内容。Ctrl+U:删除从光标位置到命令行开始的内容。Ctrl+D:如果命令行没有任何字符,它将关闭终端;如果有字符,它将删除光标位置的字符。Ctrl+H:删除光标前的字符。Ctrl+W:删除光标前的单词。Ctrl+Y:粘贴最近使
- 【数据分析】通过个体和遗址层面的遗传相关性网络分析
生信学习者1
数据分析数据分析数据挖掘r语言数据可视化
禁止商业或二改转载,仅供自学使用,侵权必究,如需截取部分内容请后台联系作者!文章目录介绍原理应用场景加载R包数据下载函数个体层面的遗传相关性网络分析导入数据数据预处理构建遗传相关性的个体网络对个体网络Nij进行可视化评估和选择最佳模型评估和选择最佳模型最佳模型进行总结拟合优度检验遗址层面的遗传相关性网络分析导入数据数据预处理构建遗址之间的遗传相关性网络可视化图条件边预测与模型评估总结系统信息介绍个
- 【Python 学习 / 7】模块与文件操作
卜及中
Python基础python学习数据库
文章目录前言一、导入模块1.导入整个模块2.导入模块中的特定函数3.给模块或函数起别名二、常用模块1.`math`模块2.`random`模块3.`os`模块4.`sys`模块三、文件处理1.打开文件2.读取文件3.写入文件4.关闭文件5.使用`with`语句管理文件四、日期时间1.`datetime`模块获取当前日期和时间创建日期和时间对象格式化日期和时间解析字符串为日期对象2.`time`模块
- 如何安装Hadoop
薇晶晶
hadoop大数据分布式
Hadoop入门(一)——CentOS7下载+VM上安装(手动分区)Hadoop入门(二)——VMware虚拟网络设置+Windows10的IP地址配置+CentOS静态IP设置Hadoop入门(三)——XSHELL7远程访问工具+XFTP7文件传输Hadoop入门(四)——模板虚拟机环境准备Hadoop入门(五)——Hadoop集群搭建-克隆三台虚拟机Hadoop入门(六)——JDK安装Hado
- 《编程小白必看!字符加减法开启大小写转换之门,解锁数学分析方法密码,列方程思想》
1zero10
c语言算法
字符加减法的应用1.输入小写字母,输出大写字母首先肯定有定义变量ch;并且让我们可以在黑框输入一个变量,也就是任意一个小写字母charch;scanf("%c\n",ch);接着分析小写字母和大写字母的联系:举例分析,比如b在小写字母表排第二位,而B在大写字母表里也排第二位小写字母和大写字母都有26个所以可以利用排位一致的特点进行方程的构造设小写字母为ch(上面已经设了)设大写字母为y到这里还毫无
- 高电服务器托管:企业IT基础设施的可靠之选
wayuncn
服务器服务器github运维
高电服务器托管服务,是指企业将自身高耗电的服务器设备或算力服务器设备交由专业托管公司进行管理和维护的一种服务模式。托管公司提供包括安全机房环境、网络设备、系统软件以及专业技术人员等全方位支持,使企业能够专注于核心业务的开发和运营。高电服务器托管服务内容高电服务器托管服务通常涵盖以下几个方面:机房管理:提供安全、稳定、可靠的机房环境,配备完善的消防、监控、空调等设施,确保服务器稳定运行。硬件维护:对
- 解读Servlet原理篇二---GenericServlet与HttpServlet
周凡杨
javaHttpServlet源理GenericService源码
在上一篇《解读Servlet原理篇一》中提到,要实现javax.servlet.Servlet接口(即写自己的Servlet应用),你可以写一个继承自javax.servlet.GenericServletr的generic Servlet ,也可以写一个继承自java.servlet.http.HttpServlet的HTTP Servlet(这就是为什么我们自定义的Servlet通常是exte
- MySQL性能优化
bijian1013
数据库mysql
性能优化是通过某些有效的方法来提高MySQL的运行速度,减少占用的磁盘空间。性能优化包含很多方面,例如优化查询速度,优化更新速度和优化MySQL服务器等。本文介绍方法的主要有:
a.优化查询
b.优化数据库结构
- ThreadPool定时重试
dai_lm
javaThreadPoolthreadtimertimertask
项目需要当某事件触发时,执行http请求任务,失败时需要有重试机制,并根据失败次数的增加,重试间隔也相应增加,任务可能并发。
由于是耗时任务,首先考虑的就是用线程来实现,并且为了节约资源,因而选择线程池。
为了解决不定间隔的重试,选择Timer和TimerTask来完成
package threadpool;
public class ThreadPoolTest {
- Oracle 查看数据库的连接情况
周凡杨
sqloracle 连接
首先要说的是,不同版本数据库提供的系统表会有不同,你可以根据数据字典查看该版本数据库所提供的表。
select * from dict where table_name like '%SESSION%';
就可以查出一些表,然后根据这些表就可以获得会话信息
select sid,serial#,status,username,schemaname,osuser,terminal,ma
- 类的继承
朱辉辉33
java
类的继承可以提高代码的重用行,减少冗余代码;还能提高代码的扩展性。Java继承的关键字是extends
格式:public class 类名(子类)extends 类名(父类){ }
子类可以继承到父类所有的属性和普通方法,但不能继承构造方法。且子类可以直接使用父类的public和
protected属性,但要使用private属性仍需通过调用。
子类的方法可以重写,但必须和父类的返回值类
- android 悬浮窗特效
肆无忌惮_
android
最近在开发项目的时候需要做一个悬浮层的动画,类似于支付宝掉钱动画。但是区别在于,需求是浮出一个窗口,之后边缩放边位移至屏幕右下角标签处。效果图如下:
一开始考虑用自定义View来做。后来发现开线程让其移动很卡,ListView+动画也没法精确定位到目标点。
后来想利用Dialog的dismiss动画来完成。
自定义一个Dialog后,在styl
- hadoop伪分布式搭建
林鹤霄
hadoop
要修改4个文件 1: vim hadoop-env.sh 第九行 2: vim core-site.xml <configuration> &n
- gdb调试命令
aigo
gdb
原文:http://blog.csdn.net/hanchaoman/article/details/5517362
一、GDB常用命令简介
r run 运行.程序还没有运行前使用 c cuntinue
- Socket编程的HelloWorld实例
alleni123
socket
public class Client
{
public static void main(String[] args)
{
Client c=new Client();
c.receiveMessage();
}
public void receiveMessage(){
Socket s=null;
BufferedRea
- 线程同步和异步
百合不是茶
线程同步异步
多线程和同步 : 如进程、线程同步,可理解为进程或线程A和B一块配合,A执行到一定程度时要依靠B的某个结果,于是停下来,示意B运行;B依言执行,再将结果给A;A再继续操作。 所谓同步,就是在发出一个功能调用时,在没有得到结果之前,该调用就不返回,同时其它线程也不能调用这个方法
多线程和异步:多线程可以做不同的事情,涉及到线程通知
&
- JSP中文乱码分析
bijian1013
javajsp中文乱码
在JSP的开发过程中,经常出现中文乱码的问题。
首先了解一下Java中文问题的由来:
Java的内核和class文件是基于unicode的,这使Java程序具有良好的跨平台性,但也带来了一些中文乱码问题的麻烦。原因主要有两方面,
- js实现页面跳转重定向的几种方式
bijian1013
JavaScript重定向
js实现页面跳转重定向有如下几种方式:
一.window.location.href
<script language="javascript"type="text/javascript">
window.location.href="http://www.baidu.c
- 【Struts2三】Struts2 Action转发类型
bit1129
struts2
在【Struts2一】 Struts Hello World http://bit1129.iteye.com/blog/2109365中配置了一个简单的Action,配置如下
<!DOCTYPE struts PUBLIC
"-//Apache Software Foundation//DTD Struts Configurat
- 【HBase十一】Java API操作HBase
bit1129
hbase
Admin类的主要方法注释:
1. 创建表
/**
* Creates a new table. Synchronous operation.
*
* @param desc table descriptor for table
* @throws IllegalArgumentException if the table name is res
- nginx gzip
ronin47
nginx gzip
Nginx GZip 压缩
Nginx GZip 模块文档详见:http://wiki.nginx.org/HttpGzipModule
常用配置片段如下:
gzip on; gzip_comp_level 2; # 压缩比例,比例越大,压缩时间越长。默认是1 gzip_types text/css text/javascript; # 哪些文件可以被压缩 gzip_disable &q
- java-7.微软亚院之编程判断俩个链表是否相交 给出俩个单向链表的头指针,比如 h1 , h2 ,判断这俩个链表是否相交
bylijinnan
java
public class LinkListTest {
/**
* we deal with two main missions:
*
* A.
* 1.we create two joined-List(both have no loop)
* 2.whether list1 and list2 join
* 3.print the join
- Spring源码学习-JdbcTemplate batchUpdate批量操作
bylijinnan
javaspring
Spring JdbcTemplate的batch操作最后还是利用了JDBC提供的方法,Spring只是做了一下改造和封装
JDBC的batch操作:
String sql = "INSERT INTO CUSTOMER " +
"(CUST_ID, NAME, AGE) VALUES (?, ?, ?)";
- [JWFD开源工作流]大规模拓扑矩阵存储结构最新进展
comsci
工作流
生成和创建类已经完成,构造一个100万个元素的矩阵模型,存储空间只有11M大,请大家参考我在博客园上面的文档"构造下一代工作流存储结构的尝试",更加相信的设计和代码将陆续推出.........
竞争对手的能力也很强.......,我相信..你们一定能够先于我们推出大规模拓扑扫描和分析系统的....
- base64编码和url编码
cuityang
base64url
import java.io.BufferedReader;
import java.io.IOException;
import java.io.InputStreamReader;
import java.io.PrintWriter;
import java.io.StringWriter;
import java.io.UnsupportedEncodingException;
- web应用集群Session保持
dalan_123
session
关于使用 memcached 或redis 存储 session ,以及使用 terracotta 服务器共享。建议使用 redis,不仅仅因为它可以将缓存的内容持久化,还因为它支持的单个对象比较大,而且数据类型丰富,不只是缓存 session,还可以做其他用途,一举几得啊。1、使用 filter 方法存储这种方法比较推荐,因为它的服务器使用范围比较多,不仅限于tomcat ,而且实现的原理比较简
- Yii 框架里数据库操作详解-[增加、查询、更新、删除的方法 'AR模式']
dcj3sjt126com
数据库
public function getMinLimit () { $sql = "..."; $result = yii::app()->db->createCo
- solr StatsComponent(聚合统计)
eksliang
solr聚合查询solr stats
StatsComponent
转载请出自出处:http://eksliang.iteye.com/blog/2169134
http://eksliang.iteye.com/ 一、概述
Solr可以利用StatsComponent 实现数据库的聚合统计查询,也就是min、max、avg、count、sum的功能
二、参数
- 百度一道面试题
greemranqq
位运算百度面试寻找奇数算法bitmap 算法
那天看朋友提了一个百度面试的题目:怎么找出{1,1,2,3,3,4,4,4,5,5,5,5} 找出出现次数为奇数的数字.
我这里复制的是原话,当然顺序是不一定的,很多拿到题目第一反应就是用map,当然可以解决,但是效率不高。
还有人觉得应该用算法xxx,我是没想到用啥算法好...!
还有觉得应该先排序...
还有觉
- Spring之在开发中使用SpringJDBC
ihuning
spring
在实际开发中使用SpringJDBC有两种方式:
1. 在Dao中添加属性JdbcTemplate并用Spring注入;
JdbcTemplate类被设计成为线程安全的,所以可以在IOC 容器中声明它的单个实例,并将这个实例注入到所有的 DAO 实例中。JdbcTemplate也利用了Java 1.5 的特定(自动装箱,泛型,可变长度
- JSON API 1.0 核心开发者自述 | 你所不知道的那些技术细节
justjavac
json
2013年5月,Yehuda Katz 完成了JSON API(英文,中文) 技术规范的初稿。事情就发生在 RailsConf 之后,在那次会议上他和 Steve Klabnik 就 JSON 雏形的技术细节相聊甚欢。在沟通单一 Rails 服务器库—— ActiveModel::Serializers 和单一 JavaScript 客户端库——&
- 网站项目建设流程概述
macroli
工作
一.概念
网站项目管理就是根据特定的规范、在预算范围内、按时完成的网站开发任务。
二.需求分析
项目立项
我们接到客户的业务咨询,经过双方不断的接洽和了解,并通过基本的可行性讨论够,初步达成制作协议,这时就需要将项目立项。较好的做法是成立一个专门的项目小组,小组成员包括:项目经理,网页设计,程序员,测试员,编辑/文档等必须人员。项目实行项目经理制。
客户的需求说明书
第一步是需
- AngularJs 三目运算 表达式判断
qiaolevip
每天进步一点点学习永无止境众观千象AngularJS
事件回顾:由于需要修改同一个模板,里面包含2个不同的内容,第一个里面使用的时间差和第二个里面名称不一样,其他过滤器,内容都大同小异。希望杜绝If这样比较傻的来判断if-show or not,继续追究其源码。
var b = "{{",
a = "}}";
this.startSymbol = function(a) {
- Spark算子:统计RDD分区中的元素及数量
superlxw1234
sparkspark算子Spark RDD分区元素
关键字:Spark算子、Spark RDD分区、Spark RDD分区元素数量
Spark RDD是被分区的,在生成RDD时候,一般可以指定分区的数量,如果不指定分区数量,当RDD从集合创建时候,则默认为该程序所分配到的资源的CPU核数,如果是从HDFS文件创建,默认为文件的Block数。
可以利用RDD的mapPartitionsWithInd
- Spring 3.2.x将于2016年12月31日停止支持
wiselyman
Spring 3
Spring 团队公布在2016年12月31日停止对Spring Framework 3.2.x(包含tomcat 6.x)的支持。在此之前spring团队将持续发布3.2.x的维护版本。
请大家及时准备及时升级到Spring
- fis纯前端解决方案fis-pure
zccst
JavaScript
作者:zccst
FIS通过插件扩展可以完美的支持模块化的前端开发方案,我们通过FIS的二次封装能力,封装了一个功能完备的纯前端模块化方案pure。
1,fis-pure的安装
$ fis install -g fis-pure
$ pure -v
0.1.4
2,下载demo到本地
git clone https://github.com/hefangshi/f
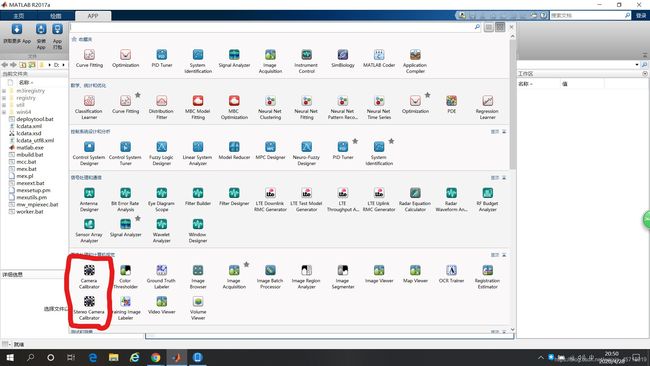
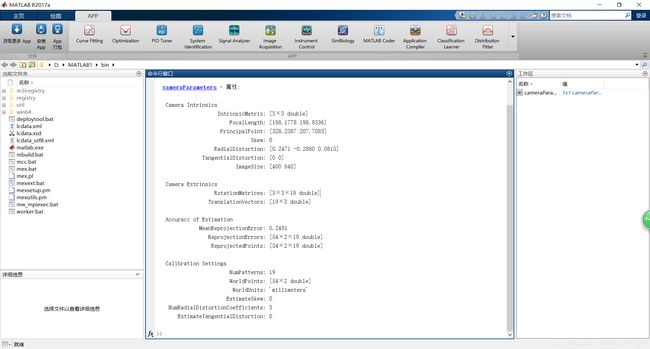
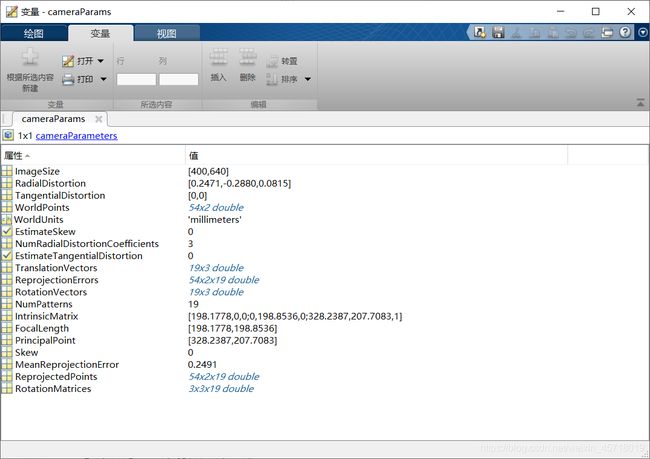
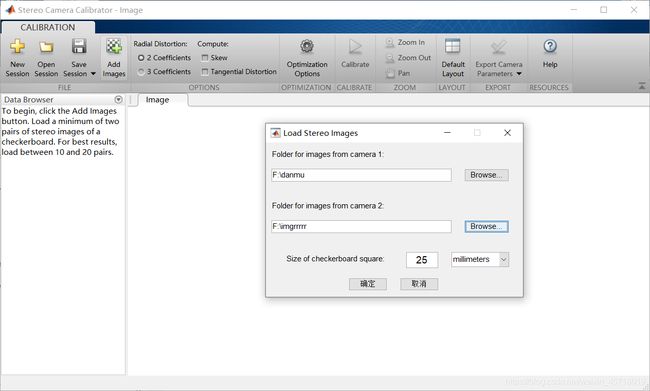
 图1.Matlab界面
图1.Matlab界面