额 文章持续更新中 信息有来自转载
Bellman-Ford 最短路方法的证明: 来自百度百科
描述性证明
首先指出,图的任意一条 最短路径既不能包含负权回路,也不会包含正权回路,因此它最多包含|v|-1条边。
其次,从源点s可达的所有顶点如果 存在 最短路径,则这些最短路径构成一个以s为根的最短路径树。Bellman-Ford算法的 迭代 松弛操作,实际上就是按顶点距离s的层次,逐层生成这棵 最短路径树的过程。
在对每条边进行第1遍 松弛的时候,生成了从s出发,层次至多为1的那些树枝。也就是说,找到了与s至多有1条边相联的那些顶点的 最短路径;对每条边进行第2遍 松弛的时候,生成了第2层次的树枝,就是说找到了经过2条边相连的那些顶点的最短路径……。因为 最短路径最多只包含|v|-1 条边,所以,只需要循环|v|-1 次。
每实施一次 松弛操作, 最短路径树上就会有一层顶点达到其最短距离,此后这层顶点的最短距离值就会一直保持不变,不再受后续松弛操作的影响。(但是,每次还要判断 松弛,这里浪费了大量的时间,怎么 优化?单纯的优化是否可行?)
注意:上述只对正权图有效。如果存在负权不一定第i次就能确定最短路,且与边的顺序有关。
如果没有负权回路,由于 最短路径树的高度最多只能是|v|-1,所以最多经过|v|-1遍 松弛操作后,所有从s可达的顶点必将求出最短距离。如果 d[v]仍保持 +∞,则表明从s到v不可达。
如果有负权回路,那么第 |v| 遍 松弛操作仍然会成功,这时,负权回路上的顶点不会收敛。
[1]
Dijkstra 的证明 和探讨
一种基于归纳法的思想:
1 本文转载自 plumrain
2 文章中有没有讲清楚的地方 等待更新
在图论中,求MST的Prim算法和求最短路的Dijskra算法非常像。可是我一直都对这两个算法处于要懂不懂的状态,现在,就来总结一下这两个算法。
最小生成树(MST)—Prim算法:
算法步骤:
•将顶点集V分成两个集合A和B,其中集合A表示目前已经在MST中的顶点,而集合B则表示目前不在MST中的顶点。
•寻找与集合A连通的最短的边(u,v),将这条边加入最小生成树中。(此时,与(u,v)相连的顶点,不妨设为Bi,也应加入集合A中。
•重复第二步,直至集合B为空集。
正确性证明:
1、由归纳法可知,只需要证明 “每次向集合A中加入一条边后都能保证,集合A这个生成树是关联到集合A中所有点的最小生成树”,就能证明Prim算法的正确性。下面用反证法证明。
2、若A此时是最小生成树,加入边(u,v)(其中u是A中的点,v不是),加入以后集合为A',反设A'不是其关联点的最小生成树。则存在某个点k使得连接边(k,v),去掉边(u,v)能将A'变为关联节点的最小生成树,那么就意味着边权w(k,v) < w(u,v),而如果这样,那么将节点v加入A时添加的边就是(k,v)而不是(u,v),矛盾。得证
PS:这里给出一个别的证明:http://www.cnblogs.com/sky-view/p/3250972.html
另外,学习最小生成树的时候,网上的很多博文、资料、题解都并没有给出证明过程而是只给出结论,建议看一下IOI2004吴景岳的论文。
最短路——Dijskra算法(求正权图中的最短路):
算法步骤:
•将顶点集V分成两个集合A和B,其中集合A表示目前已经在求出最短路的节点,而集合B则表示目前没有求出最短路的节点。
•每次将点加入集合A时,都维护一个数组d[i],表示节点i与起点通过A中的点相连所需要的最短路径长度。
•每次要向A中加入点时,都加入d[i]值最小的,且在集合B中的点。
•不断向集合A中加入点,直到集合B为空。
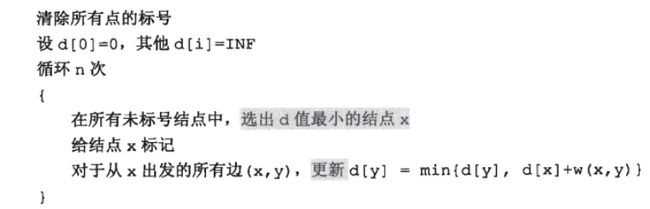
下图为白书中的伪代码:
正确性证明:
1、首先要明确一点,按照Dijskra算法形成的集合A,对任意A中的点i和B中的点j,i点到起点的最短路径已经求出设为d[i],j点到起点的最短距离设为d[j],则一定有有d[i] <= d[j],因为A中的A.size()个点是所有点中离起点距离最近的A.size()个点。
3、假设此时A中所有节点的d[]值即为其最短路,并且即将将B集合中的j点添加到A中。对于j点,它到起点的最短路如果含有边(j, k),则有两种可能出现的情况:
(1)、此时k点已经在集合A中,则可以求出j点最短路d[j];
(2)、此时k点不在A中,此时k点到起点的最短路径上有一条边为(k, k1),若点k1不在A中,则找点k1的最短路径上的边(k1, k2)。。。一直找到点kt,使得kt在B中,kt最短路径上的边(kt, k(t+1))上点k(t+1)在A中。这样,因为此时要将j点加入A中,且j点和kt点一定不同,所以d[j] <= d[kt],而因为边权为正,所以d[kt] < d[k],所以d[j] < d[k] < d[k] + w(j, k) = d[j],所以此种情况矛盾。所以k点一定在集合A中。
所以,算法正确。
额 从百度百科上找到的SPFA算法的证明
求单源最短路的SPFA算法的全称是:Shortest Path Faster Algorithm,是 西南交通大学段凡丁于1994年发表的。从名字我们就可以看出,这种算法在效率上一定有过人之处。很多时候,给定的图存在负权边,这时类似Dijkstra等算法便没有了用武之地,而 Bellman-Ford算法的复杂度又过高,SPFA算法便派上用场了。简洁起见,我们约定加权 有向图G不存在负权回路,即最短路径一定存在。如果某个点进入队列的次数超过N次则存在负环(SPFA无法处理带负环的图)。当然,我们可以在执行该算法前做一次 拓扑排序,以判断是否存在负权回路,但这不是我们讨论的重点。我们用 数组d记录每个结点的 最短路径估计值,而且用 邻接表来存储图G。我们采取的方法是动态逼近法:设立一个先进先出的 队列用来保存待优化的结点,优化时每次取出队首结点u,并且用u点当前的最短路径估计值对离开u点所指向的结点v进行 松弛操作,如果v点的最短路径估计值有所调整,且v点不在当前的队列中,就将v点放入队尾。这样不断从队列中取出结点来进行松弛操作,直至队列空为止。定理: 只要最短路径存在,上述SPFA算法必定能求出最小值。
证明:每次将点放入队尾,都是经过 松弛操作达到的。换言之,每次的优化将会有某个点v的 最短路径估计值d[v]变小。所以算法的执行会使d越来越小。由于我们假定图中不存在负权回路,所以每个结点都有最短路径值。因此,算法不会无限执行下去,随着d值的逐渐变小,直到到达最短路径值时,算法结束,这时的最短路径估计值就是对应结点的最短路径值。
期望的 时间复杂度:O(ke), 其中k为所有顶点进队的平均次数,可以证明k一般小于等于2。
对SPFA的一个很直观的理解就是由无权图的 BFS转化而来。在无权图中,BFS首先到达的顶点所经历的路径一定是最短路(也就是经过的最少顶点数),所以此时利用数组记录节点访问可以使每个顶点只进队一次,但在带权图中,最先到达的顶点所计算出来的路径不一定是最短路。一个解决方法是放弃数组,此时所需时间自然就是指数级的,所以我们不能放弃数组,而是在处理一个已经在队列中且当前所得的路径比原来更好的顶点时,直接更新最优解。
(“算法编程后实际运算情况表明m一般没有超过2n.事实上顶点入队次数m是一个不容易事先分析出来的数,但它确是一个随图的不同而略有不同的常数.所谓常数,就是与e无关,与n也无关,仅与边的权值分布有关.一旦图确定,权值确定,原点确定,m就是一个确定的常数.所以SPFA算法复杂度为O(e)(证毕)"
[1] ——SPFA的论文
但事实上这个证明是非常不严谨甚至错误的,事实上在bellman算法的论文中已有这方面的内容,所以国际上一般不承认SPFA算法)
SPFA算法有两个优化算法 SLF 和 LLL: SLF:Small Label First 策略,设要加入的节点是j,队首元素为i,若dist(j)x则将i插入到队尾,查找下一元素,直到找到某一i使得dist(i)<=x,则将i出对进行松弛操作。 SLF 可使速度提高 15 ~ 20%;SLF + LLL 可提高约 50%。 在实际的应用中SPFA的算法时间效率不是很稳定,为了避免最坏情况的出现,通常使用效率更加稳定的Dijkstra算法。