Trajectory Clustering(DBSCAN算法进行轨迹聚类)
Trajectory Clustering
- 1. 步骤
- 2. 提取轨迹特征点
-
-
- 2.1 算法思想
- 2.2 计算MDLpar和MDLnopar
- 2.3 代码
-
- 2.3.1 一些计算距离的函数
- 2.3.2 计算MDLpar和MDLnopar
- 2.3.3 提取轨迹特征点
-
- 3. DBSCAN聚类
- 4. 参考
数据及代码
1. 步骤
- 提取轨迹特征点
- 使用DBSCAN算法聚类
2. 提取轨迹特征点
2.1 算法思想
一段轨迹,比如 {p1,p2,p3,p4,p5},遍历这个轨迹的所有点,计算每一个点的MDLpar和MDLnopar,如果MDLpar > MDLnopar,那么这个点就是特征点(MDL就是最小描述原则,有兴趣可以自行搜索)
算法伪代码

2.2 计算MDLpar和MDLnopar
轨迹 {pc1,pc2,pc3,pc4,ppari}

比如

MDLpar = L(H) + L(D|H)
MDLnopar = L(H)(轨迹总长度,上图为len(p1,p2)+len(p2,p3)+len(p3,p4))
两条线段Lj,Li(短的为Lj,长的为Li)

2.3 代码
2.3.1 一些计算距离的函数
def calc_distance(p1, p2):
"""计算p1,p2的直线距离"""
return math.sqrt((p1[0] - p2[0]) ** 2 + (p1[1] - p2[1]) ** 2)
def calc_straight_line(p1, p2):
"""计算p1 p2的直线方程"""
try:
k = (p1[1] - p2[1]) / (p1[0] - p2[0])
except ZeroDivisionError:
k = 0
b = p1[1] - k * p1[0]
return k, b
def calc_projection(p1, p2, p3):
"""计算 p1 在 线段(p2,p3)上的投影点"""
k, b = calc_straight_line(p2, p3)
x = (k * (p1[1] - b) + p1[0]) / (k ** 2 + 1)
y = k * x + b
return [x, y]
def calc_point_line_distance(p1, p2, p3):
"""计算点 p1 到 线段(p2,p3)的距离"""
a = p3[1] - p2[1]
b = p2[1] - p3[1]
c = p3[0] * p2[1] - p2[0] * p2[1]
try:
distance = (math.fabs(a * p1[0] + b * p1[1] + c)) / (math.pow(a * a + b * b, 0.5))
except ZeroDivisionError:
distance = 0
return distance
def calc_angel_sin(p1, p2, p3, p4):
"""计算两条线段之间夹角的sin"""
dx1 = p1[0] - p2[0]
dy1 = p1[1] - p2[1]
dx2 = p3[0] - p4[0]
dy2 = p3[1] - p4[1]
angle1 = math.atan2(dy1, dx1)
angle2 = math.atan2(dy2, dx2)
if angle1 * angle2 >= 0:
angle = abs(angle1 - angle2)
else:
angle = abs(angle1) + abs(angle2)
sin = abs(math.sin(angle))
return sin
def calc_li_and_lj(p1, p2, p3, p4):
"""
短的为Lj,长的为Li
:return: Lj,Li
"""
if calc_distance(p1, p2) < calc_distance(p3, p4):
return [p1, p2], [p3, p4]
else:
return [p3, p4], [p1, p2]
def calc_d_vertical(p1, p2, p3, p4):
"""计算 d垂直"""
Lj, Li = calc_li_and_lj(p1, p2, p3, p4)
L1 = calc_point_line_distance(Lj[0], Li[0], Li[1])
L2 = calc_point_line_distance(Lj[1], Li[0], Li[1])
try:
d = (L1 ** 2 + L2 ** 2) / (L1 + L2)
except ZeroDivisionError:
d = 0
return d
def calc_d_parallel(p1, p2, p3, p4):
"""计算d平行,取Lj在Li上的投影点到两端的距离中短的一部分"""
Lj, Li = calc_li_and_lj(p1, p2, p3, p4)
point1 = calc_projection(Lj[0], Li[0], Li[1])
point2 = calc_projection(Lj[1], Li[0], Li[1])
d1 = calc_distance(point1, Li[0])
d2 = calc_distance(point1, Li[1])
d3 = calc_distance(point2, Li[0])
d4 = calc_distance(point2, Li[1])
return min(d1, d2, d3, d4)
def calc_d_sin(p1, p2, p3, p4):
"""Lj * sin"""
Lj, Li = calc_li_and_lj(p1, p2, p3, p4)
sin = calc_angel_sin(p1, p2, p3, p4)
return calc_distance(Lj[0], Lj[1]) * sin
def calc_line_distance(p1, p2, p3, p4):
"""计算两条线段的距离"""
return calc_d_parallel(p1, p2, p3, p4) + calc_d_vertical(p1, p2, p3, p4) + calc_d_sin(p1, p2, p3, p4)
2.3.2 计算MDLpar和MDLnopar
def calc_mdl_pair(points):
"""计算某个节点的MDL_pair = L(H) + L(D|H)"""
distance = calc_distance(points[0], points[-1])
if distance == 0:
return -float('inf')
LH = math.log(distance, 2)
d_vertical = 0 # d垂直
d_sin = 0
for i in range(len(points) - 1):
d_vertical += calc_d_vertical(points[0], points[-1], points[i], points[i + 1])
d_sin += calc_d_sin(points[0], points[-1], points[i], points[i + 1])
if d_vertical == 0 or d_sin == 0:
return -float('inf')
LDH = math.log(d_vertical, 2) + math.log(d_sin, 2)
return LDH + LH
def calc_mdl_no_pair(points):
"""计算某个节点的MDL_no_pair = L(H) (轨迹总长度)"""
total_length = 0
for i in range(len(points) - 1):
total_length += calc_distance(points[i], points[i + 1])
if total_length == 0:
return -float('inf')
return math.log(total_length, 2)
2.3.3 提取轨迹特征点
def trajectory_division(points):
"""
:param points: 轨迹点的数组
:return: 轨迹的特征点
"""
result = [points[0]]
start = 0
length = 1
while start + length <= len(points):
current = start + length
cost_pair = calc_mdl_pair(points[start:current + 1])
cost_no_pair = calc_mdl_no_pair(points[start:current + 1])
if cost_pair > cost_no_pair:
result.append(points[current])
start = current
length = 1
else:
length += 1
result.append(points[-1])
return result
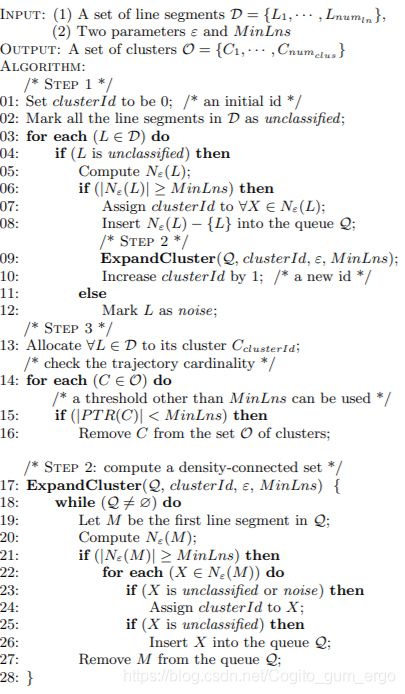
3. DBSCAN聚类
(直接上代码,注释里面有思路,下图是论文里面的伪代码)
UNCLASSIFIED = -1 # 未分类的cluster_id
NOISE = 9999 # noise的cluster_id
def compute_area(L, line_segment, e):
"""
:param L: 线段
:param line_segment: 所有线段集合
:param e: 半径
:return: 邻域
计算线段邻域
"""
area_L = [L]
for i in range(len(line_segment)):
line = line_segment[i].copy()
distance = calc_line_distance(L['line'][0], L['line'][1], line['line'][0], line['line'][1])
# print(distance)
if distance <= e:
line['index'] = i
area_L.append(line)
return area_L
def expand_cluster(Q, cluster_id, e, min_lns, line_segment):
"""
while len(Q) > 0:
M = Q.pop(0)
计算 M 的邻域 area_M
if len(area_M) >= min_lns:
for X in area_M:
if X is unclassified or noise:
给 X 分配一个 cluster_id
if X is unclassified:
Q.append(X)
"""
Q.pop(0) # 删除L
while len(Q) > 0:
M = Q.pop(0)
# line_segment[M['index']]['cluster_id'] = cluster_id
area_M = compute_area(M, line_segment, e)
if len(area_M) >= min_lns:
for X in area_M:
if X['cluster_id'] == UNCLASSIFIED or X['cluster_id'] == NOISE:
line_segment[X['index']]['cluster_id'] == cluster_id
# if X['cluster_id'] == UNCLASSIFIED:
# Q.append(X)
def assign_cluster_id(area_L, line_segment, cluster_id):
for line in area_L:
cur_id = line_segment[line['index']]['cluster_id']
if cur_id == UNCLASSIFIED or cur_id == NOISE:
line_segment[line['index']]['cluster_id'] = cluster_id
def line_segment_clustering(line_segments, e, min_lns):
"""
:param line_segments: 线段集合
:param e: 邻域半径
:param min_lns: 邻域需包含的最小线段数
:return: 簇集合 O
初始化cluster_id为0
标记线段集合中的所有线段为未分类
for L in line_segments:
if L is unclassified:
计算 L 的邻域 area_L
if len(area_L) >= min_lns:
给 area_L 中的所有线段分配cluster_id
将 area_L - L 插入队列 Q
expand_cluster(Q, cluster_id, e, min_lns)
cluster_id++
else:
将 L 标记为 noise
分配line_segments中所有线段,得到簇集合O
for C in O:
if |PTR(C)| < min_lns:
将C从O中移除
"""
cluster_id = 0
O = {
}
for i in range(len(line_segments)):
print('簇:', cluster_id)
L = line_segments[i].copy()
L['index'] = i
if L['cluster_id'] == UNCLASSIFIED:
area_L = compute_area(L, line_segments, e)
if len(area_L) >= min_lns:
assign_cluster_id(area_L, line_segments, cluster_id)
expand_cluster(area_L, cluster_id, e, min_lns, line_segments)
cluster_id += 1
else:
line_segments[i]['cluster_id'] = NOISE
for line in line_segments:
if line['cluster_id'] not in O:
O[line['cluster_id']] = [line]
else:
O[line['cluster_id']].append(line)
for cluster_id in O.copy():
if len(O[cluster_id]) < min_lns:
del O[cluster_id]
return O
其实之后还有计算每个簇的代表轨迹,轨迹的可视化,聚类评估等,但我能力有限,后面实现的不是很对,有兴趣可以自己去看论文或者其它文章
4. 参考
- 论文
- 轨迹聚类(一):分段及归组框架