Binder之ProcessState和IPCThreadState类分析
ProcessState
ProcessState表示进程状态,一个进程就一个ProcessState对象。它的职责:1、打开Binder驱动;2、建立线程池。
/frameworks/native/include/binder/ProcessState.h
class ProcessState : public virtual RefBase
{
public:
static sp self();
void startThreadPool();
void spawnPooledThread(bool isMain);
private:
int mDriverFD;
void* mVMStart;
// Maximum number for binder threads allowed for this process.
size_t mMaxThreads;
bool mThreadPoolStarted;
volatile int32_t mThreadPoolSeq;
}
以上是ProcessState中Binder相关的接口和成员变量。
1)获取ProcessState实例,并打开Binder驱动
//单例模式
sp ProcessState::self()
{
Mutex::Autolock _l(gProcessMutex);
if (gProcess != NULL) {
return gProcess;
}
gProcess = new ProcessState;
return gProcess;
}
//构造函数
ProcessState::ProcessState()
: mDriverFD(open_driver())//在创建实例时就打开了Binder驱动
, mVMStart(MAP_FAILED)
……
, mMaxThreads(DEFAULT_MAX_BINDER_THREADS)
……
, mThreadPoolStarted(false)
, mThreadPoolSeq(1)
{
if (mDriverFD >= 0) {
// mmap the binder, providing a chunk of virtual address space to receive transactions.
mVMStart = mmap(0, BINDER_VM_SIZE, PROT_READ, MAP_PRIVATE | MAP_NORESERVE, mDriverFD, 0);
if (mVMStart == MAP_FAILED) {
// *sigh*
ALOGE("Using /dev/binder failed: unable to mmap transaction memory.\n");
close(mDriverFD);
mDriverFD = -1;
}
}
LOG_ALWAYS_FATAL_IF(mDriverFD < 0, "Binder driver could not be opened. Terminating.");
}
这个构造函数里面调用open_driver()打开了/dev/binder设备驱动文件,返回了Binder驱动的文件描述符。在Linux里一切皆文件,而文件描述符就相当于这个文件的句柄,可以对这个文件进行读写操作。有了Binder驱动的文件描述符就可以对Binder驱动进行读写。
2)创建线程池ProcessState::self()->startThreadPool();
void ProcessState::startThreadPool()
{
AutoMutex _l(mLock);
if (!mThreadPoolStarted) {//从这里可以看出线程池只能被创建一次
mThreadPoolStarted = true;
spawnPooledThread(true);//创建线程池时就会马上创建一个主线程
}
}
void ProcessState::spawnPooledThread(bool isMain)
{
if (mThreadPoolStarted) {
String8 name = makeBinderThreadName();
ALOGV("Spawning new pooled thread, name=%s\n", name.string());
sp t = new PoolThread(isMain);
t->run(name.string());
}
}
//PoolThread是一个继承于Thread的类,创建了PoolThread其实就是创建了一个线程。
//调用t->run()之后相当于调用PoolThread类的threadLoop()函数。
class PoolThread : public Thread
{
public:
PoolThread(bool isMain)
: mIsMain(isMain)
{
}
protected:
virtual bool threadLoop()
{
IPCThreadState::self()->joinThreadPool(mIsMain);
// 这里线程函数调用了一次IPCThreadState::self()->joinThreadPool()后就退出了
return false;
}
const bool mIsMain;
};
IPCThreadState
IPCThreadState表示进程间通信的线程状态,一个负责进程间通信的线程有且仅有一个IPCThreadState对象。它提供了与Binder驱动交互的函数:sendReply、waitForResponse、joinThreadPool、transact、talkWithDriver、writeTransactionData、getAndExecuteCommand。
1)创建IPCThreadState对象,并赋值给当前线程
static pthread_mutex_t gTLSMutex = PTHREAD_MUTEX_INITIALIZER;
static bool gHaveTLS = false;//记录线程私有数据对应的key创建与否
static pthread_key_t gTLS = 0;
IPCThreadState* IPCThreadState::self()
{
if (gHaveTLS) {//判断线程私有数据的key创建与否,
//若没有创建就先创建,然后再走下面的方法体
restart:
const pthread_key_t k = gTLS;
//取出key对应的当前线程的私有数据,
//这里将该key对应的线程私有数据设置成了IPCThreadState对象
IPCThreadState* st = (IPCThreadState*)pthread_getspecific(k);
if (st) return st;
return new IPCThreadState;//若当前线程的key对应的IPCThreadState对象不存在,则创建IPCThreadState对象
}
if (gShutdown) {
ALOGW("Calling IPCThreadState::self() during shutdown is dangerous, expect a crash.\n");
return NULL;
}
pthread_mutex_lock(&gTLSMutex);
if (!gHaveTLS) {
//创建线程私有数据的key,并赋值给gTLS
int key_create_value = pthread_key_create(&gTLS, threadDestructor);
if (key_create_value != 0) {
pthread_mutex_unlock(&gTLSMutex);
ALOGW("IPCThreadState::self() unable to create TLS key, expect a crash: %s\n",
strerror(key_create_value));
return NULL;
}
gHaveTLS = true;
}
pthread_mutex_unlock(&gTLSMutex);
goto restart;
}
线程私有数据的有关内容可以查阅以下文章:
pthread_key_create()–创建线程私有数据|pthread_key_delete()–注销线程私有数据
IPCThreadState::IPCThreadState()
: mProcess(ProcessState::self()),//获取当前进程的ProcessState对象并赋值给成员变量mProcess
mMyThreadId(gettid()),
mStrictModePolicy(0),
mLastTransactionBinderFlags(0)
{
pthread_setspecific(gTLS, this);//将当前线程的key(即gTLS)对应的私有数据设置成自己
clearCaller();
mIn.setDataCapacity(256);//mIn:输入缓冲区
mOut.setDataCapacity(256);//mOut:输出缓冲区
}
2)IPCThreadState既作为客户端,又作为服务端
作为客户端:
transact() -- writeTransactionData() -- waitForResponse() -- talkWithDriver() -- reply->ipcSetDataReference()
status_t IPCThreadState::transact(int32_t handle, uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
……
// 发送ADD_SERVICE_TRANSACTION请求
writeTransactionData(BC_TRANSACTION, flags, handle, code, data, NULL);
if(reply) // 等待响应
waitForResponse(NULL, reply);
……
}
/**
* 将data的数据写入输出缓冲区
*/
status_t IPCThreadState::writeTransactionData(int32_t cmd, uint32_t binderFlags,
int32_t handle, uint32_t code, const Parcel& data, status_t* statusBuffer)
{
binder_transaction_data tr;//创建一个结构体binder_transaction_data
tr.target.ptr = 0; /* Don't pass uninitialized stack data to a remote process */
tr.target.handle = handle;
tr.code = code;
tr.flags = binderFlags;
……
const status_t err = data.errorCheck();
if (err == NO_ERROR) {
//将Parcel类的data中的数据写入结构体tr中
tr.data_size = data.ipcDataSize();
tr.data.ptr.buffer = data.ipcData();
tr.offsets_size = data.ipcObjectsCount()*sizeof(binder_size_t);
tr.data.ptr.offsets = data.ipcObjects();
}
……
mOut.writeInt32(cmd);
mOut.write(&tr, sizeof(tr));//最后将结构体tr写入输出缓冲区
return NO_ERROR;
}
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
talkWithDriver();//与binder驱动交互
……
cmd = (uint32_t)mIn.readInt32();
……
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
……
break;
case BR_REPLY:
{
binder_transaction_data tr;//创建一个结构体binder_transaction_data
err = mIn.read(&tr, sizeof(tr));//从输入缓冲区中将数据写入结构体tr中
……
if (reply) {
if ((tr.flags & TF_STATUS_CODE) == 0) {
//最后将结构体tr中的数据写入reply
reply->ipcSetDataReference(
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t),
freeBuffer, this);
}
}
……
}
goto finish;
……
}
}
finish:
if (err != NO_ERROR) {
……
if (reply) reply->setError(err);
……
}
return err;
}
status_t IPCThreadState::talkWithDriver(bool doReceive)
{
binder_write_read bwr;
bwr.write_size = outAvail;
bwr.write_buf = (long unsigned int)mOut.data(); // 取出输出缓冲区
bwr.read_size = mIn.dataCapacity;
bwr.read_buffer = (long unsigned int)mIn.data();//取出输入缓冲区
ioctl(mProcess->mDriverFD, BINDER_WRITE_READ, &bwr); // 把mOut写到Binder,并将返回数据读入mIn
……
if (bwr.read_consumed > 0) {
mIn.setDataSize(bwr.read_consumed);
mIn.setDataPosition(0);
}
……
}
作为服务端:
joinThreadPool() -- getAndExecuteCommand() -- talkWithDriver() -- executeCommand() -- sendReply() -- writeTransactionData() -- waitForResponse()
void IPCThreadState::joinThreadPool(bool isMain) {
mOut.writeInt32(isMain ? BC_ENTER_LOOPER : BC_REGISTER_LOOPER);
status_t result;
do {
result = getAndExecuteCommand();
} while (result != -ECONNREFUSED && result != -EBADF);
mOut.writeInt32(BC_EXIT_LOOPER);
}
status_t IPCThreadState::getAndExecuteCommand() {
status_t result;
int32_t cmd;
result = talkWithDriver();//将输出缓冲区mOut的数据写入Binder驱动,并从Binder驱动把返回数据读入输入缓冲区mIn
cmd = mIn.readInt32();
result = executeCommand(cmd);
return result;
}
status_t IPCThreadState::executeCommand(int32_t cmd) {
status_t result = NO_ERROR;
switch ((uint32_t)cmd) {
case BR_TRANSACTION:
binder_transaction_data tr;//创建结构体binder_transaction_data
result = mIn.read(&tr, sizeof(tr));//将输入缓冲区中的数据读入结构体tr中
Parcel buffer;
//将结构体tr的数据写入buffer
buffer.ipcSetDataReference(
reinterpret_cast(tr.data.ptr.buffer),
tr.data_size,
reinterpret_cast(tr.data.ptr.offsets),
tr.offsets_size/sizeof(binder_size_t), freeBuffer, this);
Parcel reply;
//调用BBinder的transact(),将参数buffer传入,将返回值写入reply
reinterpret_cast(tr.cookie)->transact(tr.code, buffer,
&reply, tr.flags);
……
sendReply(reply, 0);
……
}
}
status_t IPCThreadState::sendReply(const Parcel& reply, uint32_t flags)
{
status_t err;
status_t statusBuffer;
//将返回数据reply写入输出缓冲区mOut
err = writeTransactionData(BC_REPLY, flags, -1, 0, reply, &statusBuffer);
if (err < NO_ERROR) return err;
return waitForResponse(NULL, NULL);
}
status_t IPCThreadState::waitForResponse(Parcel *reply, status_t *acquireResult)
{
uint32_t cmd;
int32_t err;
while (1) {
talkWithDriver();
……
cmd = (uint32_t)mIn.readInt32();
……
switch (cmd) {
case BR_TRANSACTION_COMPLETE:
if (!reply && !acquireResult) goto finish;
break;
}
}
finish:
if (err != NO_ERROR) {
……
if (reply) reply->setError(err);
……
}
return err;
}
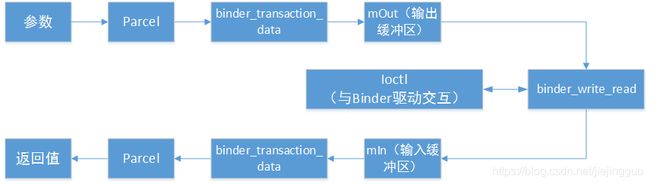
小结:IPCThreadState与Binder驱动交互可以简化为如下的读写过程:
3)BBinder与BpBinder
当IPCThreadState作为服务端时出现了BBinder,它是Binder的本地对象,相对应地存在一个BpBinder,它表示Binder的代理对象。
status_t IPCThreadState::executeCommand(int32_t cmd) {
switch ((uint32_t)cmd) {
case BR_TRANSACTION:
……
Parcel reply;
//调用BBinder的transact(),将参数buffer传入,将返回值写入reply
reinterpret_cast(tr.cookie)->transact(tr.code, buffer,
&reply, tr.flags);
……
}
}
status_t BpBinder::transact(uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
IPCThreadState::self()->transact(mHandle, code, data, reply, flags);
}
4)示例MediaPlayerService
可以通过具体示例MediaPlayerService来分析我们应用程序中怎么通过Binder通信的。关于MediaPlayerService的分析可以参考下面文章:Android开发之MediaPlayerService详解。
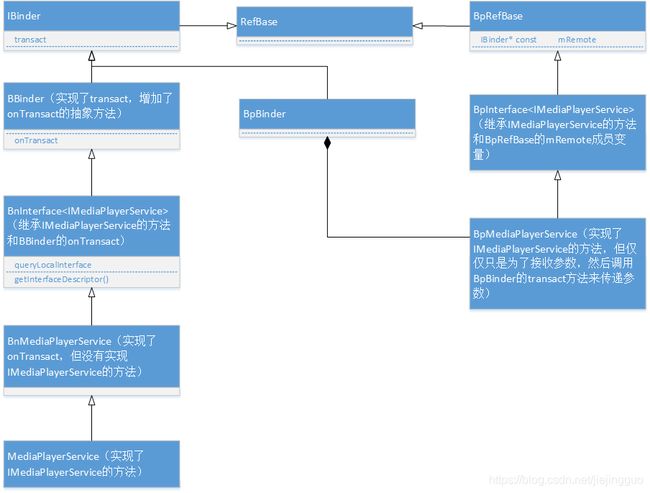
下面是MediaPlayerService中Binder通信相关的类图。
5)binder_proc和binder_thread

在用户空间中一个进程一个ProcessState,一个用于进程间通信的线程一个IPCThreadState。而在内核空间中也提供了对应的数据结构:binder_proc和binder_thread。binder_proc与ProcessState一一对应,binder_thread与IPCThreadState一一对应。
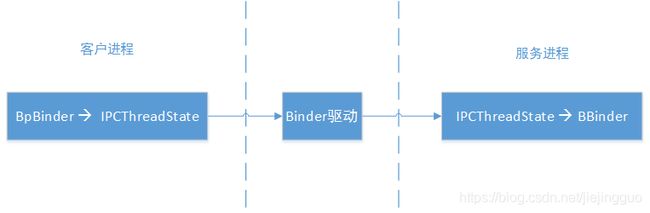
binder_thread与IPCThreadState构建了用户空间和内核空间的的通信通道。IPCThreadState将handle和参数传给了binder_thread。如下代码:
status_t BpBinder::transact(uint32_t code, const Parcel& data, Parcel* reply, uint32_t flags)
{
IPCThreadState::self()->transact(mHandle, code, data, reply, flags);
}
Binder驱动从binder_thread中取出handle和参数,根据handle找到当前进程对应的binder_proc中的binder_ref,再由binder_ref找到服务进程对应的binder_proc中binder_node。接着从binder_node从取出BBinder的地址,把该地址和参数传给服务进程的binder_thread,最后交给该binder_thread对应的IPCThreadState执行如下代码:
status_t IPCThreadState::executeCommand(int32_t cmd) {
switch ((uint32_t)cmd) {
case BR_TRANSACTION:
……
Parcel reply;
//调用BBinder的transact(),将参数buffer传入,将返回值写入reply
reinterpret_cast(tr.cookie)->transact(tr.code, buffer,
&reply, tr.flags);
……
}
}
最后执行BBinder的onTransact方法,具体怎么执行那就要看BBinder的实际对象类型,这就涉及到面向对象的多态性。