水声定位中的CBF波束形成原理
水声定位系统的系统结构
使用水声定位对水下目标进行定位时,定位信号发送时间可以由同步信标或者应答器得到,之后与声速相乘就可得到两者之间的距离。
目标方位估计则要通过计算声信号到达不同声传感器阵元的时间延迟或者相位延迟来估计。
水声定位的系统结构如图所示,定位过程如下:

(1)接收阵列:整个信号接收模块由若干个子阵组成,各个子阵接收待处理的水声信号,每个子阵包含一定数量的水听器基元。
(2)波束形成:波束形成处理,用来形成阵列的空间指向性,从而达到对接收信号进行空域滤波的目的,获得空间处理增益,提高信噪 比,改善测量精度。
(3)方位估计:各个子阵的输出信号送入到后端的信号处理单元,由线阵测向算法进行波达方位估计。
波束形成(Beamforming)
Beamforming: conjunction with an array of sensors to provide a versatile form of spatial filtering.
为什么要使用波束形成?
我们以移动通信为例:思考一下生活中是否遇到过,在某个地方人少时候信号很好,但是人特别多的地方手机信号变得特别差,这个就是因为当无线信号在空间中全方面辐射时候,只有一小部分信号被接收成为有用信号,大部分信号并没有被相应接收机制接收到,而是辐射到其他的接收机成为了干扰信号,而将无线信号(电磁波)只按照特定方向传播的技术叫做波形成(beamforming)。有了波束形成,众多小伙伴就可以在同一个地方欢快的玩手机上网而不用担心没有信号的问题了。

在声呐系统应用:目前世界各国都致力于水下目标定位算法的研究,采用声呐进行水下定位可分为主动声呐和被动声呐。主动是声呐本身需要辐射声波,把接收目标反射波作为检测估计的基础,虽然现在主动声呐仍然是海军主力声设备,但是主动声呐存在着隐蔽性差的缺点。而被动声呐不向外发波,隐蔽性好,不易被发现水下工作时间长等优点,在实际应用中作用越来越大所以必须加大研究被动声呐探测定位技术。对被动声定位的研究主要是对波束形成算法的研究。波束形成大致可分为两类:传统波束形(Conventional Beamforming, CBF)成和自适应波束形成(Adaptive Beamforming ,ABF )。
波束成形源于自适应天线的一个概念。接收端的信号处理,可以通过对多天线阵元接收到的各路信号进行加权合成,成形所需的理想信号。从天线方向图视角来看,这样做相当于成形了规定指向上的波束。在水声环境中,接收阵元接收信号信噪比低,不利于水声定位精度的提升,而利用波束成形技术,可以抵消干扰,提高接收信噪比。
波束形成本质:
多个传感器的数据(发射/接收) 经过一系列运算或延时、加权等处理, 得到增益加权相加使得某个方向的输出增大, 相当于指向了该方向使指定方向的信号通过,对其他一些空间方向来的噪声和干扰有所抑制,也称为空域滤波。波束形成可以用模拟方法和数字方法实现。当前已广泛使用数字方法。波束图亦称方向图,呈花瓣形,其中发射能力最集中或接收响应最高的波束称主波束(又称主瓣),在主波束旁侧一系列较低的波束称为旁瓣或副瓣。
应用场景:
雷达、 声呐、 导航、 地震波探测、 语音处理、 移动通信、 医用超声设备。
传统波束形成器(Conventional Beamforming, CBF)
对于时域的波束成形通常有两种方法:相移波束形成和时延波束形成。在基元之间插入相移使主波束极大方向控制于不同方位的方法称为相移波束成形,而插入时延使波束控制于不同方位的方法称之时延波束形成。
在主动声呐中,长应用相移波束形成;在被动声呐中,则用时延波束形成。采用时延波束形成,对接收信号进行滤波处理。
在波束形成时,只要选择合适的权值,波束图就会在所需方向上得到加强,而在其他方向上减弱。信号通过波束形成单元可以增强信号、抑制噪声,从而提高了输入信噪比。波束形成单元的具体结构如下如图所示:

本文所介绍的常规CBF算法是采用延时加权求和法,对本文阵列模型进行就按求和。通过一个加权向量w对阵列接收到的数据加权相加得到输出![]() ,所以确定
,所以确定 是Beamforming中非常重要的步骤。首先我们将所有问题简化,不存在噪声,只有单一一个信源,而且这个信源还是正弦波。我们的阵列接收对于简谐波在不同的阵元到达时间不同,造成了不同的时延,或者说是相位差。那么非常直观明确的,如果想要对这个简谐波得到最大程度的放大,只需要将这些时延给抵消。多以最优的加权向量就应该等于正弦波来波方向的方向向量。在高斯白噪声背景下,即
是Beamforming中非常重要的步骤。首先我们将所有问题简化,不存在噪声,只有单一一个信源,而且这个信源还是正弦波。我们的阵列接收对于简谐波在不同的阵元到达时间不同,造成了不同的时延,或者说是相位差。那么非常直观明确的,如果想要对这个简谐波得到最大程度的放大,只需要将这些时延给抵消。多以最优的加权向量就应该等于正弦波来波方向的方向向量。在高斯白噪声背景下,即![]() ,结论不变。
,结论不变。
波束图Bp(θ)
波束图是CBF对不同来波方向的响应。
BF的加权向量w确定后(例如CBF:w=a(30°)),该BF对θ∈R的响应Polar图即为波束图。
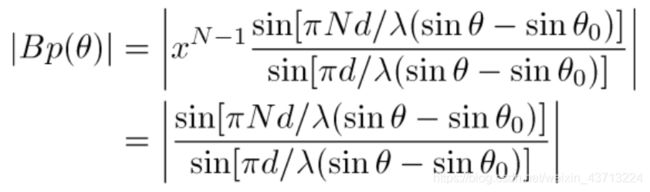
均匀线阵(ULA)CBF的波束图
方向向量:
加权向量:
波束图:


方位估计(Direction of Arrival, DOA)
DOA(direction of arrival)估计也就是方位估计, 是阵列信号处理中的重要内容,也是声呐系统中必不可少的一部分。 空间谱和波束形成的关系是:空间谱估计可以通过多个方位扫描进行多个波束形成来实现。此外,空间谱估计也可以由其他参数化和非参数化的方法来实现。
空间谱P(θ)
空间谱,即来波信号到达时,令BF在θ∈R范围搜索,得到的空间谱P(θ)。例如,在白噪声背景下,假设CBF:w=a(θ), θ=[-10°; -9°; -8°; … 10°],逐次搜索,得到响应y(θ)=w(θ)x(t)=w(θ)[as(t)+n(t)],那么波束图P(θ)=wHxHxw,即:
![]()