【统计学习方法 • 从无到有系列】— 【三】k 近邻算法 kNN
- 本文收录于Github仓库,欢迎前来 star 呀~ https://github.com/Veal98/CS-Wiki
- 在线阅读地址/更好的阅读体验请移步:https://veal98.gitee.io/cs-wiki/

k 近邻算法 kNN
思维导图
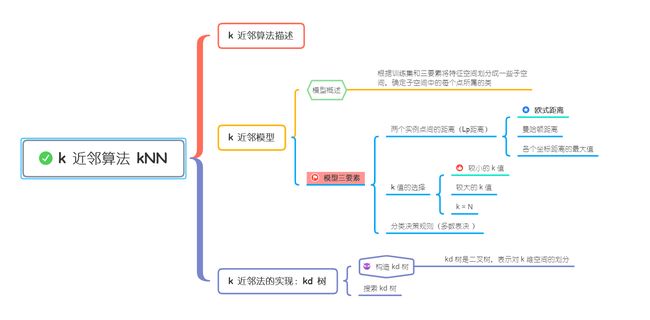
1. k 近邻算法描述
✅ k 近邻算法 k-nearest neighbor, kNN 可简单描述为:存在一个带标签的训练样本集,输入没有标签的新数据后,将新数据的每个特征和样本集中的数据对应的特征进行比较,然后算法提取样本集中 k 个特征最相似(最邻近)的分类标签(这就是 k-近邻算法中 k 的 出处,一般 k 不大于 20)。最后,选择这 k 个最相似数据中出现次数最多的分类,作为新数据的分类。
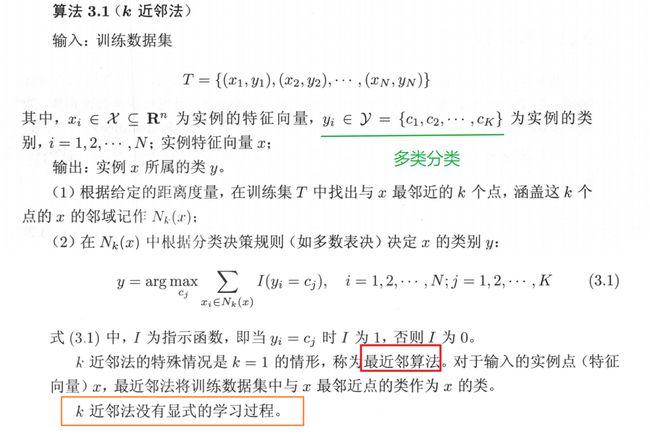
k 近邻法是基本且简单的分类与回归方法,此处我们只考虑分类问题中的 k 近邻法,k 近邻算法是一个可以取多类的分类方法
举个 kNN 算法的直观例子如下:
❓ 假如有一部未看过的电影,如何确定它是爱情片还是动作片呢?
下图显示了 6 部电影的打斗和接吻镜头数,? 就是我们要判断的电影:

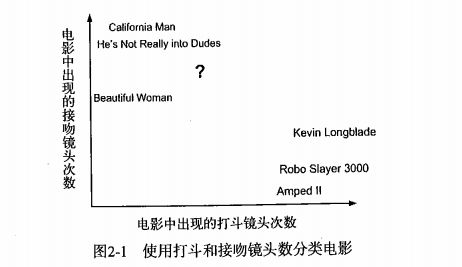
计算未知电影与样本集中其他电影的距离(此处暂时不要关心如何计算得到这些距离,下文会详细讲解)
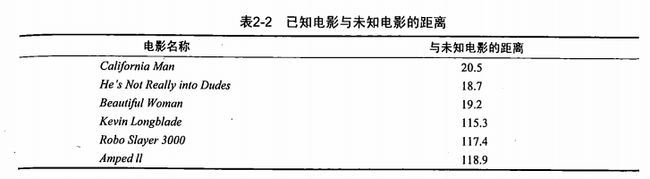
假定 k = 3,则最靠近的三个电影分别是 He's Not Really into Dudes,Beautiful Woman,California Man,这三部电影都是爱情片,所以我们判断未知电影是爱情片。
2. k 近邻模型
① 模型概述
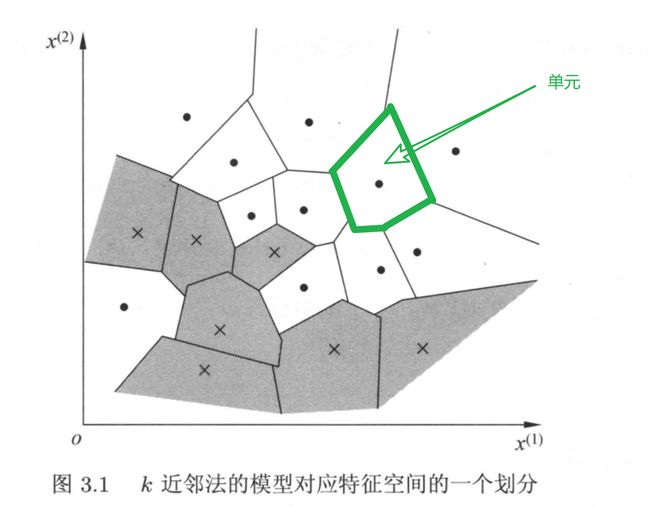
k 近邻法中,根据训练集和模型三要素(距离度量即两个实例点之间的距离,k 值,分类决策规则)可以将特征空间划分成一些子空间,确定子空间中的每个点所属的类。
特征空间中,对每个实例点,距离该点比其他点更近的所有点组成一个区域,叫作单元 cell。每个训练实例拥有一个单元。
② 模型三要素
Ⅰ 距离度量
✅ 所谓距离度量就是两个实例点之间的距离计算方法,常用的距离是欧式距离。也可以是其他距离,比如更一般的 L p L_p Lp 距离:
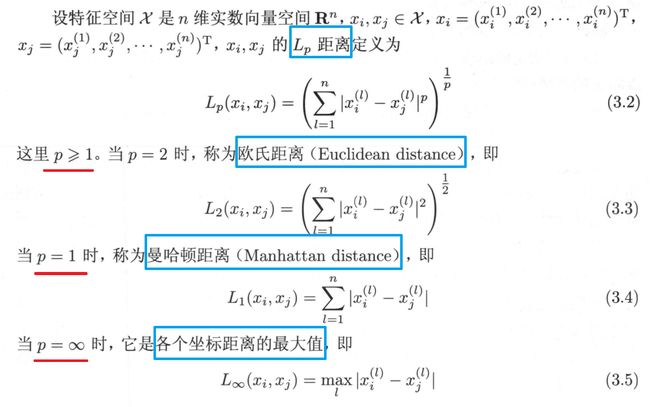
p = ∞ p = ∞ p=∞ 时的距离也称为 切比雪夫距离
计算 L p L_p Lp 距离的 Python 3 代码实现如下:
import math
# 计算点 x 和 y 之间的 Lp 距离(默认是欧式距离)
def L(x, y, p=2):
# 最少是二维空间
if len(x) == len(y) and len(x) > 1:
sum = 0
for i in range(len(x)):
sum += math.pow(abs(x[i] - y[i]), p)
return math.pow(sum, 1 / p)
else:
return 0
测试该代码:
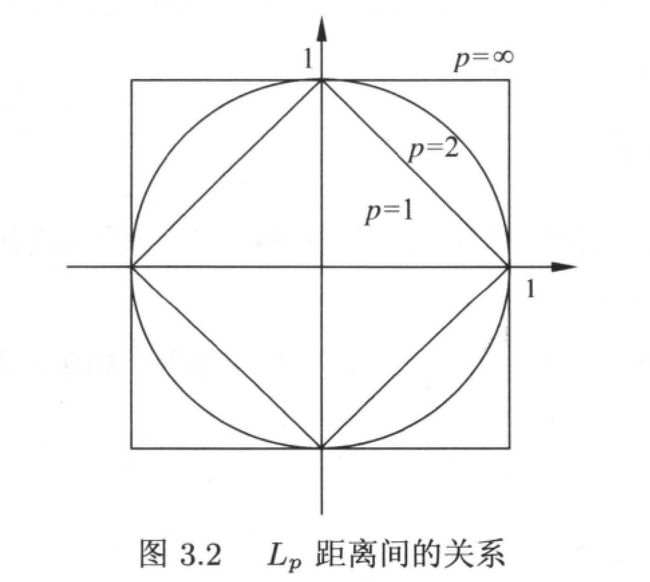
下图给出了二维空间中取值不同时,与原点的 L p L_p Lp 距离为 1 ( L p = 1 L_p = 1 Lp=1) 的点的图形:
显然,不同的距离度量所确定的最近邻点是不同的, 如下例所示:
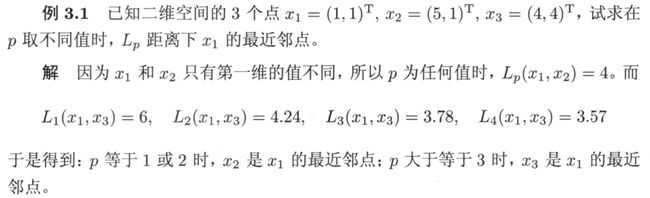
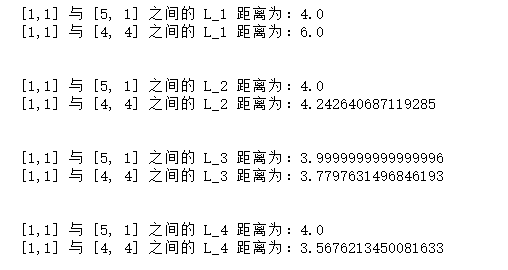
编写代码验证上例:
x1 = [1, 1]
x2 = [5, 1]
x3 = [4, 4]
for i in range(1, 5):
for c in [x2,x3]:
print('[1,1] 与 {} 之间的 L_{} 距离为:{}'.format(c,i,L(x1,c,p=i)))
print('\n')
Ⅱ k 值的选择
k 值的选择会对 k 近邻法的结果产生重大影响:
-
如果选择较小的 k 值:相当于用较小的邻域中的训练实例进行预测,学习的近似误差 approximation error会减小,只有与输入实例较近的训练实例才会对结果有影响。缺点是估计误差 estimation error会增大,预测结果会对邻近的实例点非常敏感,如果邻近的实例点是噪声,预测就会出错。
通俗来说,k 值的减小意味着模型变得复杂,容易发生过拟合。
-
如果选择较大的 k 值:相当于用较大的邻域中的训练实例进行预测,可以减少学习的估计误差,但是缺点是近似误差会增大,因为此时与输入实例较远的训练实例也会对预测结果产生影响。
通俗来说,k 值的增大意味着模型变得简单。
-
如果 k = N(训练实例的个数):无论输入实例是什么,都将简单地将其预测为整个训练实例中最多的类。显然这是不可取的
在应用中,一般选取较小的 k 值,通常采用交叉验证法来选取最优的 k 值。
Ⅲ 分类决策规则
k 近邻法中的分类决策规则往往是多数表决:即由输入实例的 k 个邻近的训练实例中的多数类决定输入实例的类。
3. k 近邻算法的实现 1:线性扫描 linear scan
① 概述
k 近邻法最简单的实现方法是线性扫描 linear scan,即计算输入实例与其他每个训练实例的距离,不过这种方法在训练集很大的时候是不可取的
② 代码详解
以欧式距离为距离度量标准,以多数表决为分类决策规则,基于线性扫描的 kNN 算法的 Python 3 代码如下所示:
def classify(inX,dataSet,labels, k):
"""
Desc:
对输入数据点 inx 使用 kNN 算法进行分类
Args:
inX: 输入数据点
dataSet: 训练数据集
labels: 训练数据集的标签集合
k: kNN 算法中的 k,即选取 k 个近邻
"""
dataSetSize = dataSet.shape[0] # 训练数据集中数据的个数
# 计算输入数据点和训练数据集中各个数据点的欧式距离
diffMat = np.tile(inX,(dataSetSize, 1)) - dataSet # 计算未知类的数据集与已知数据集的差
sqDiffMat = diffMat**2 # 差值平方化
sqDistances = sqDiffMat.sum(axis=1) # 把(未平方根化之前的)未知数据集与两个已知数据的距离分别计算出来
distances = sqDistances**0.5 # 距离平方根化
# 对距离进行排序,返回下标
sortedDistIndicies = distances.argsort()
classCount = {
} # 记录 k 个近邻点的类别(标签)
for i in range(k):
voteIlabel = labels[sortedDistIndicies[i]] # 遍历排序后的前 k 个标签
classCount[voteLabel] = classCount.get(voteIlabel,0) + 1 # 记录这 k 个标签出现的次数
sortedClassCount = sorted(classCount.items(), key = operator.itemgetter(1), reverse = True) # 按照出现次数对标签进行从大到小排序
return sortedClassCount[0][0] # 返回出现次数最多的那个标签
详解如下:
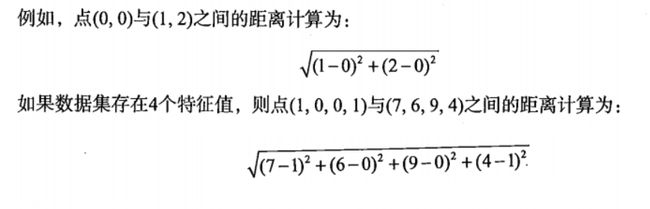
计算输入数据点和训练数据集中各个数据点的欧式距离:
使用欧式距离公式,计算两个向量点 xA 和 xB 之间的距离:

# 计算未知类的数据集与已知数据集的差,为了方便要把未知类的数据集化成矩阵计算
diffMat = np.tile(inX,(dataSetSize, 1)) - dataSet
np.tile(inX,(dataSetSize, 1)) 将未知类数据 inX 沿着 Y 轴方向扩充 dataSetSize 倍(4 倍),沿着 X 轴扩充 1 倍,即不扩充
举个例子:设未知类数据 inX 是 ([[0,3]]) 即 [ 0 3 ] \begin{bmatrix} 0 & 3\end{bmatrix} [03],数据集 dataSet是 ([[1,3],[3,4]]) 即 [ 1 3 3 4 ] \begin{bmatrix} 1 & 3 \\ 3 & 4 \end{bmatrix} [1334]
将 inx 沿着 Y 轴扩充 2 倍后: [ 0 3 0 3 ] \begin{bmatrix} 0 & 3 \\ 0 & 3 \end{bmatrix} [0033]
计算未知类数据集与已知数据集的差: [ 0 3 0 3 ] − [ 1 3 3 4 ] \begin{bmatrix} 0 & 3 \\ 0 & 3 \end{bmatrix} - \begin{bmatrix} 1 & 3 \\ 3 & 4 \end{bmatrix} [0033]−[1334] = [ − 1 0 − 3 1 ] \begin{bmatrix} -1 & 0 \\ -3 & 1 \end{bmatrix} [−1−301]
sqDiffMat = diffMat**2 # 差值平方化
s q D i f f M a t = [ − 1 0 − 3 1 ] 2 sqDiffMat = \begin{bmatrix} -1 & 0 \\ -3 & 1 \end{bmatrix}^2 sqDiffMat=[−1−301]2 = [ 1 0 9 1 ] \begin{bmatrix} 1 & 0 \\ 9 & 1 \end{bmatrix} [1901]
# 把(未平方根化之前的)未知数据集与两个已知数据的距离分别计算出来
sqDistances = sqDiffMat.sum(axis=1)
按行向量进行相加:
$sqDistances = [1, 10] $
1 是未知数据与 [1, 3] 的距离,10 是未知数据与 [3, 4] 的距离
distances = sqDistances**0.5 # 距离平方根化
将两个距离分别进行平方根化,分别得到该未知标签向量与已知点的欧式距离
sortedDistIndicies = distances.argsort() # 排序,返回下标
比如说:[3, 5, 1] 从小到大排序分别是:1,3,5,对应的索引是 2,0,1
这样我们在循环的时候, 可以将欧式距离按值从小到大遍历出来
获取距离最近的前 k 个标签出现的次数:
接下来是一个循环,用来记录前 k 个标签分别出现的次数:
classCount = {
}
for i in range(k):
voteIlabel = labels[sortedDistIndicies[i]] # 遍历排序后的前 k 个标签
classCount[voteIlabel] = classCount.get(voteIlabel,0) + 1 # 记录这 k 个标签出现的次数
classCount是一个字典,用来存储标签和标签出现的次数
classCount.get(voteIlabel,0) 返回字典 classCount中 voteIlabel 元素对应的值,若无,则进行初始化为 0,若有,则返回该值
classCount[voteIlabel] = classCount.get(voteIlabel,0) + 1
初始化 classCount = {} 时,此时输入classCount,输出为:
classCount = {}
当第一次遇到新的 label 时,将新的 label 添加到字典 classCount,并初始化其对应数值为 0
然后 +1,即该 label 已经出现过一次,此时输入classCount,输出为:
classCount = {voteIlabel: 1}
当第二次遇到同一个 label 时,classCount.get(voteIlabel,0) 返回对应的数值(此时括号内的 0 不起作用,因为已经初始化过了),然后+1,此时输入classCount,输出为:
classCount = {voteIlabel: 2}
可以看出,+1 是每一次都会起作用的, 因为不管遇到字典内已经存在的或者不存在的,都需要把这个元素记录下来
按照标签出现的次数对标签进行排序:
循环结束后,按照标签出现的次数对标签进行排序:
sortedClassCount = sorted(classCount.items(), key = operator.itemgetter(1), reverse = True) # 按照出现次数对标签进行从大到小排序
classCount.items() 返回的是一个元组 dict_items,即将 classCount转化为元组。例如:
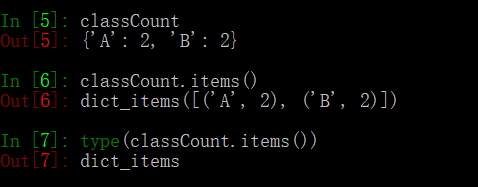
operator.itemgetter(1) 按照第二个元素的次序对元组进行排序(默认从小到大),reverse=True 是逆序,即按照从大到小的顺序排列
返回出现次数最多的标签:
排序完毕后,返回元组中的第一个元素即出现次数最多的标签:
return sortedClassCount[0][0] # 返回出现次数最多的那个标签
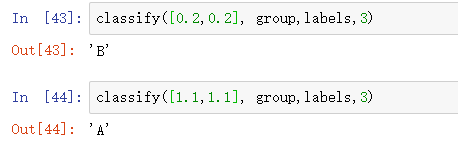
③ 运行代码
OK,测试一下上述代码:
import numpy as np
import operator # 运算符模块
import matplotlib.pyplot as plt
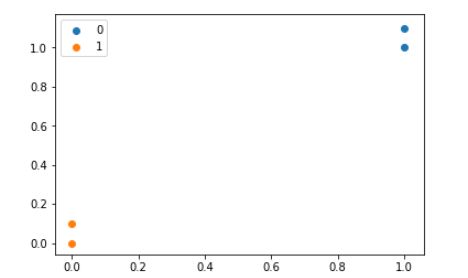
# 构造数据集
group = np.array([[1.0, 1.1],[1.0, 1.0],[0, 0],[0, 0.1]])
labels = ['A', 'A', 'B' ,'B']
plt.scatter(group[:2,0], group[:2,1], label = '0')
plt.scatter(group[2:4,0], group[2:4,1], label = '1')
plt.legend()
4. k 近邻算法的实现 2:kd 树
① 概述
实现 k 近邻算法时,主要考虑的问题就是如何对训练数据进行快速 k 近邻搜索。
k 近邻法最简单的实现方法是线性扫描 linear scan,这需要计算输入实例与其他每个训练实例的距离,在训练集很大的时候,这种方法是不可取的(上述代码中我们使用的方法都是线性扫描)
为了提高 k 近邻搜索的效率,可以考虑使用特殊的结构存储训练数据,以减少计算距离的次数,比如 kd 树
kd 树是二叉树,表示对 k 维空间的一个划分,是一种对 k 维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。
② 构造 kd 树
Ⅰ 图解构造 kd 树算法
构造 kd 树相当于不断地用垂直于坐标轴的超平面将 k 维空间切分,构成一些列的 k 维超矩形区域。kd 树的每一个结点对应于一个 k 维超矩形区域。
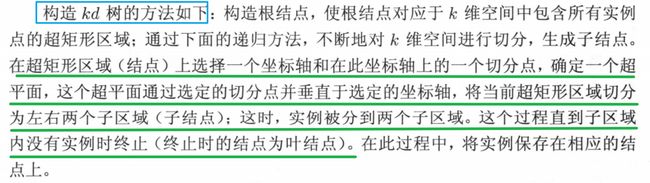
通常,依次选择坐标轴对空间切分,选择训练实例点在选定坐标轴上的中位数(median)为切分点,这样得到的 kd 树是平衡的。 注意,平衡的 kd 树搜索时的效率未必是最优的。
下面给出构造 kd 树的算法:
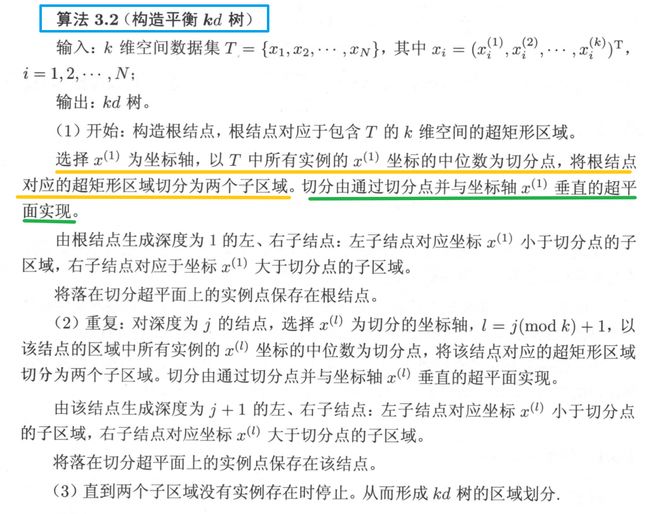
举例如下:
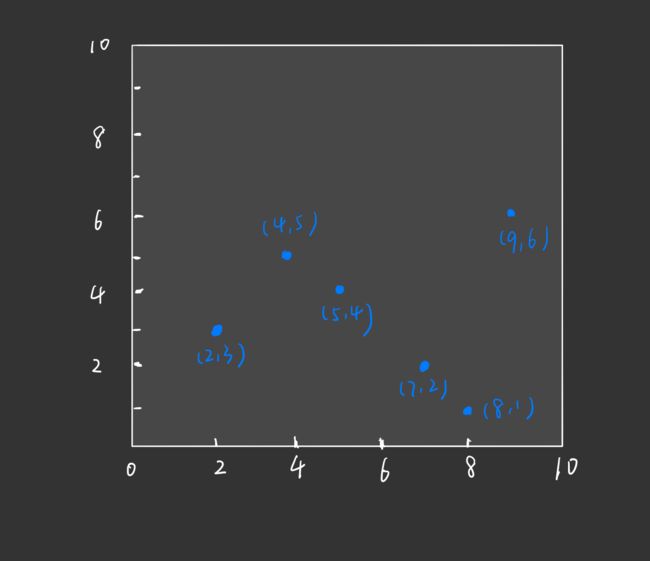
给定一个二维空间的数据集构造一个平衡 kd 树:

详细步骤如下:
-
首先,我们的数据集对应的特征空间如下:
-
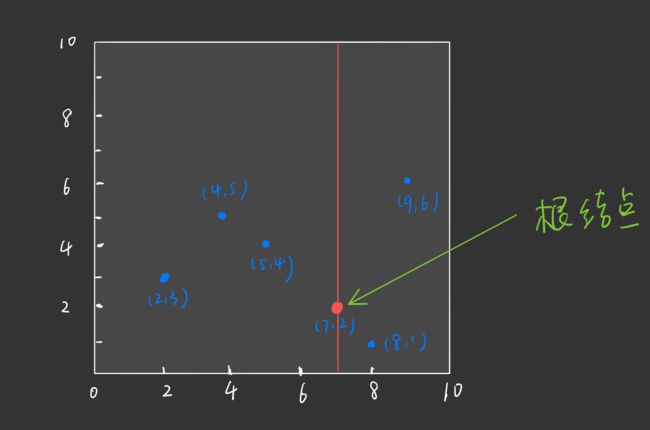
根节点对应包含数据集 T 的矩形。选择 x ( 1 ) x^{(1)} x(1) 轴,6 个数据点的 x ( 1 ) x^{(1)} x(1) 坐标依次为: 2 , 5 , 9 , 4 , 8 , 7 2,5,9,4,8,7 2,5,9,4,8,7,对应的中位数为 7(中位数本该为 6,但是数据集中没有该数据点,故选 7),即根节点为 ( 7 , 2 ) (7,2) (7,2)
⭐ 通过与 x ( 1 ) x^{(1)} x(1) 垂直的轴即 y 轴进行切分( x ( 1 ) = 7 x^{(1)} = 7 x(1)=7), 将空间分为左右两个子矩形:
对应的,构造出的 kd 树如下:
-
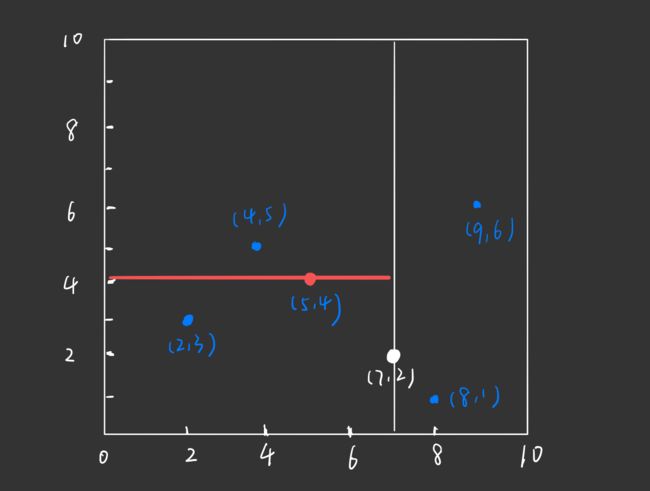
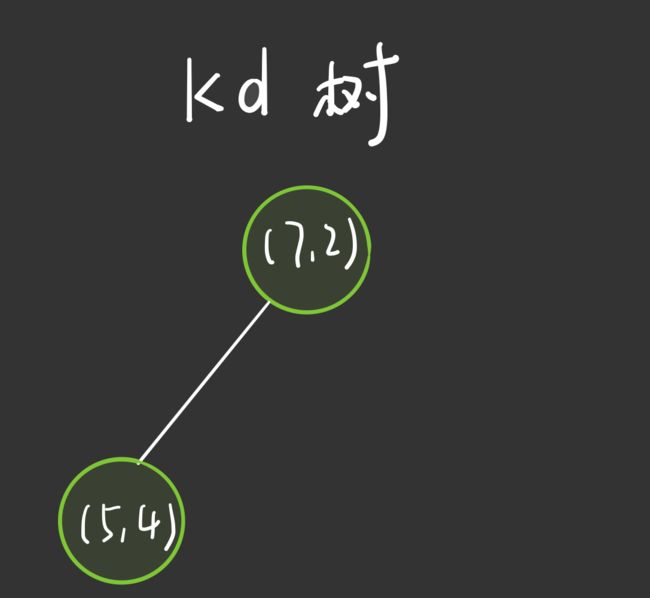
接着,左矩形以 x ( 2 ) x^{(2)} x(2) 轴 的中位数进行划分。左矩形中拥有的实例点为: ( 4 , 5 ) , ( 2 , 3 ) , ( 5 , 4 ) (4,5),(2,3),(5,4) (4,5),(2,3),(5,4), 这 3 个数据点的 x ( 2 ) x^{(2)} x(2) 坐标分别为 5 , 3 , 4 5,3,4 5,3,4,中位数为 4,即根节点的左孩子为 ( 5 , 4 ) (5,4) (5,4)
通过与 x ( 2 ) x^{(2)} x(2) 垂直的轴即 x 轴进行切分( x ( 2 ) = 4 x^{(2)} = 4 x(2)=4), 将空间分为左右两个子矩形:
对应的,构造出的 kd 树如下:
-
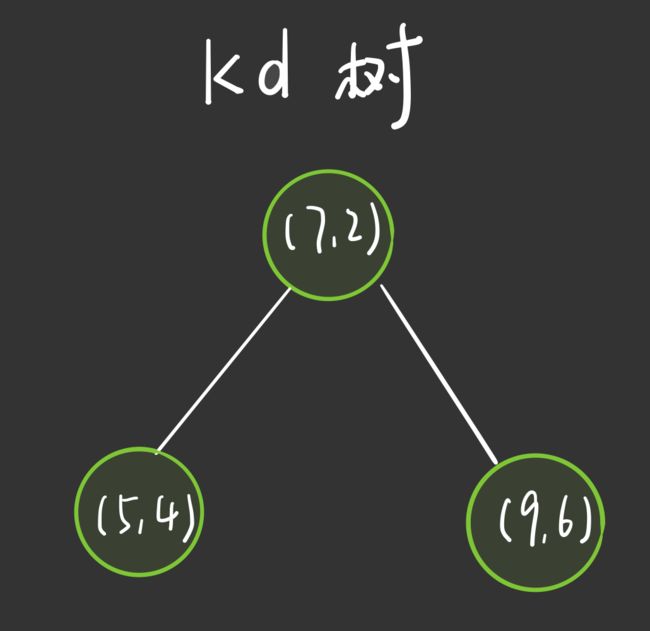
同样的,根节点切分出来的右矩形也以 x ( 2 ) x^{(2)} x(2) 轴 的中位数进行划分。右矩形中拥有的实例点为: ( 8 , 1 ) , ( 9 , 6 ) (8,1),(9,6) (8,1),(9,6), 这 3 个数据点的 x ( 2 ) x^{(2)} x(2) 坐标分别为 1 , 6 1,6 1,6,中位数为 6,即根节点的右孩子为 ( 9 , 6 ) (9,6) (9,6)
通过与 x ( 2 ) x^{(2)} x(2) 垂直的轴即 x 轴进行切分( x ( 2 ) = 6 x^{(2)} = 6 x(2)=6), 将空间分为左右两个子矩形:
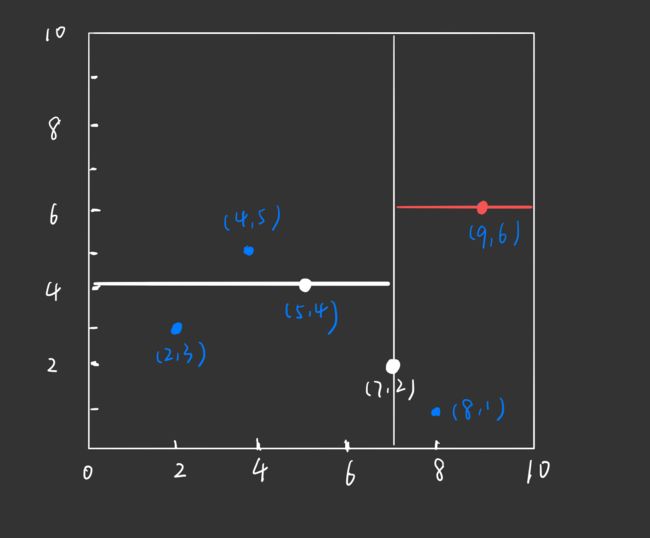
对应的,构造出的 kd 树如下:
-
OK,根节点划分出来的两个子区域处理完了,现在来看根节点的左孩子划分出来的两个子区域,每个子区域中只有一个数据点了: ( 2 , 3 ) (2,3) (2,3) 和 ( 4 , 5 ) (4,5) (4,5), 上面过程中我们依次按照 x ( 1 ) , x ( 2 ) x^{(1)}, x^{(2)} x(1),x(2) 进行选取,所以现在又回到了 x ( 1 ) x^{(1)} x(1) (如果有 $ x^{(3)}$ 则按照 $ x^{(3)}$ 进行选取)。
通过与 x ( 1 ) x^{(1)} x(1) 垂直的轴即 y 轴进行切分( x ( 1 ) = 2 x^{(1)} = 2 x(1)=2 和 x ( 1 ) = 4 x^{(1)} = 4 x(1)=4), 将空间分为左右两个子矩形:

对应的,构造出的 kd 树如下:

-
根节点的左孩子划分出来的两个子区域处理完了,现在来处理根节点的右孩子划分出来的两个子区域,只有一个子区域中有数据点 ( 8 , 1 ) (8,1) (8,1)。
通过与 x ( 1 ) x^{(1)} x(1) 垂直的轴即 y 轴进行切分( x ( 1 ) = 8 x^{(1)} = 8 x(1)=8), 将空间分为左右两个子矩形:
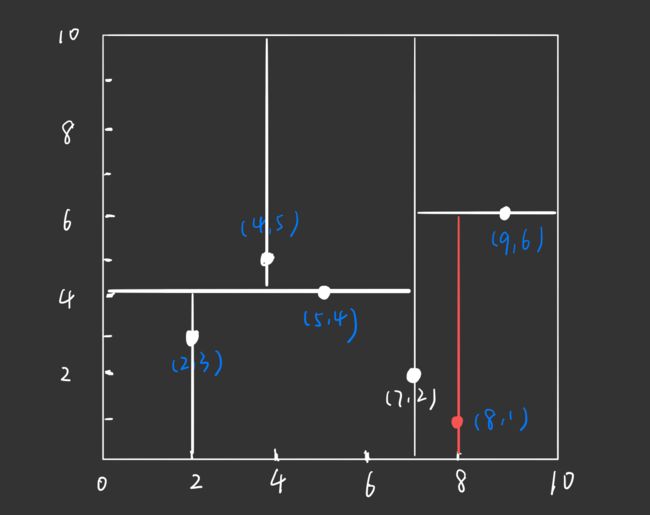
对应的,构造出的 kd 树如下:

至此,kd 树构造完毕
Ⅱ 代码实现
构造 kd 树算法的具体 Python 代码实现如下:
# kd-tree每个结点中主要包含的数据结构如下
class KdNode(object):
def __init__(self, dom_elt, split, left, right):
self.dom_elt = dom_elt # k维向量节点(k维空间中的一个样本点)
self.split = split # 整数(进行分割维度的序号)
self.left = left # 该结点分割超平面左子空间构成的kd-tree
self.right = right # 该结点分割超平面右子空间构成的kd-tree
class KdTree(object):
def __init__(self, data):
k = len(data[0]) # 数据维度
def CreateNode(split, data_set): # 按第split维划分数据集exset,并创建KdNode
if not data_set: # 数据集为空
return None
# key参数的值为一个函数,此函数只有一个参数且返回一个值用来进行比较
# operator模块提供的itemgetter函数用于获取对象的哪些维的数据,参数为需要获取的数据在对象中的序号
#data_set.sort(key=itemgetter(split)) # 按要进行分割的那一维数据排序
data_set.sort(key=lambda x: x[split])
split_pos = len(data_set) // 2 # //为Python中的整数除法,求中位数的下标
median = data_set[split_pos] # 中位数分割点
split_next = (split + 1) % k # 循环选取下一个划分的维度
# 递归的创建kd树
return KdNode(
median,
split,
CreateNode(split_next, data_set[:split_pos]), # 创建左子树
CreateNode(split_next, data_set[split_pos + 1:])) # 创建右子树
self.root = CreateNode(0, data) # 从第0维分量开始构建kd树,返回根节点
# KDTree的前序遍历
def preorder(root):
print(root.dom_elt)
if root.left: # 节点不为空
preorder(root.left)
if root.right:
preorder(root.right)
测试一下上述代码:
data = [[2,3],[5,4],[9,6],[4,7],[8,1],[7,2]]
kd = KdTree(data)
preorder(kd.root)
③ 搜索 kd 树
Ⅰ 图解搜索 kd 树算法
下面介绍如何利用 kd 树进行 k 近邻搜索。
给定一个目标点,搜索其近邻。首先找到包含目标点的叶节点,然后从该叶节点出发,依次回退到父节点;不断查找与目标点最邻近的节点,当确定不可能存在更近的节点时终止。
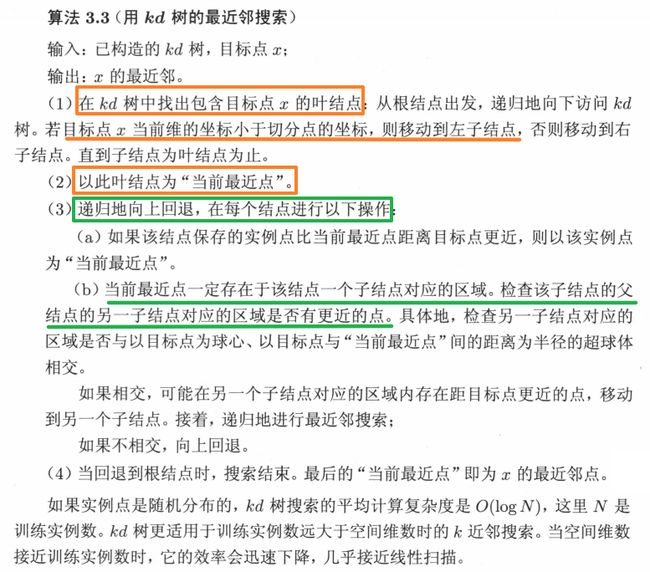
显然,利用 kd 树可以省去对大部分数据点的搜索,从而减少搜索的计算量
下面通过一个例题来说明搜索方法:
给定一个如下图所示的 kd 树,根节点为 A,树上共存储 7 个实例点,另有一个输入目标实例点 S,求 S 的最近邻。
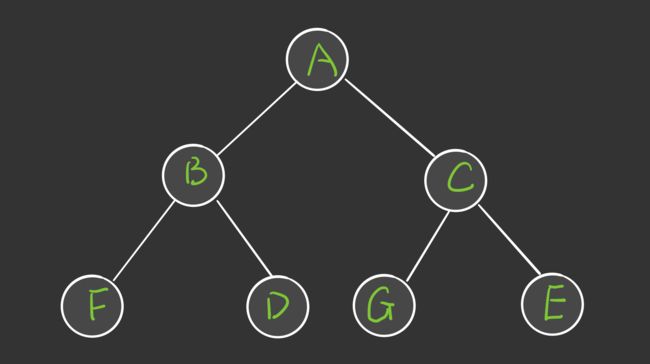

- 首先在 kd 树中找到包含点 S 的叶节点 D,以点 D 作为近似最近邻( 真正最近邻一定在以点 S 为圆心用过点 D 的圆的内部)
- 然后返回节点 D 的父节点 B,在节点 B 的另一子节点 F 的区域内搜索最近邻。节点 F 的区域与圆不相交,不可能有最近邻点
- 继续返回上一级父节点 A,在节点 A 的另一子节点 C 的区域内搜索最近邻。节点 C 的区域与圆相交,该区域在圆内的实例点有 E,且点 E 比点 D 更近,所以点 E 成为新的最近邻。
Ⅱ 代码实现
搜索 kd 树算法的具体 Python 代码实现如下:
# 对构建好的kd树进行搜索,寻找与目标点最近的样本点:
import math
from collections import namedtuple
# 定义一个namedtuple,分别存放最近坐标点、最近距离和访问过的节点数
result = namedtuple("Result_tuple",
"nearest_point nearest_dist nodes_visited")
def find_nearest(tree, point):
k = len(point) # 数据维度
def travel(kd_node, target, max_dist):
if kd_node is None:
return result([0] * k, float("inf"),0) # python中用float("inf")和float("-inf")表示正负无穷
nodes_visited = 1
s = kd_node.split # 进行分割的维度
pivot = kd_node.dom_elt # 进行分割的“轴”
if target[s] <= pivot[s]: # 如果目标点第s维小于分割轴的对应值(目标离左子树更近)
nearer_node = kd_node.left # 下一个访问节点为左子树根节点
further_node = kd_node.right # 同时记录下右子树
else: # 目标离右子树更近
nearer_node = kd_node.right # 下一个访问节点为右子树根节点
further_node = kd_node.left
temp1 = travel(nearer_node, target, max_dist) # 递归遍历找到包含目标点的区域
nearest = temp1.nearest_point # 以此叶结点作为“当前最近点”
dist = temp1.nearest_dist # 更新最近距离
nodes_visited += temp1.nodes_visited
if dist < max_dist:
max_dist = dist # 最近点将在以目标点为球心,max_dist为半径的超球体内
temp_dist = abs(pivot[s] - target[s]) # 第s维上目标点与分割超平面的距离
if max_dist < temp_dist: # 判断超球体是否与超平面相交
return result(nearest, dist, nodes_visited) # 不相交则可以直接返回,不用继续判断
#----------------------------------------------------------------------
# 计算目标点与分割点的欧氏距离
temp_dist = sqrt(sum((p1 - p2)**2 for p1, p2 in zip(pivot, target)))
if temp_dist < dist: # 如果“更近”
nearest = pivot # 更新最近点
dist = temp_dist # 更新最近距离
max_dist = dist # 更新超球体半径
# 检查另一个子结点对应的区域是否有更近的点
temp2 = travel(further_node, target, max_dist)
nodes_visited += temp2.nodes_visited
if temp2.nearest_dist < dist: # 如果另一个子结点内存在更近距离
nearest = temp2.nearest_point # 更新最近点
dist = temp2.nearest_dist # 更新最近距离
return result(nearest, dist, nodes_visited)
return travel(tree.root, point, float("inf")) # 从根节点开始递归
测试一下上述代码:

ret = find_nearest(kd, [3,4.5])
print (ret)

References
- 《统计学习方法 - 第 2 版》
- 《Machine Learning in Action》
- 《机器学习 - 周志华》
- 黄海广 — 《统计学习方法》的代码实现
- Github - AiLearning
- 【Python】get()函数作用
- np.tile()函数的作用