NRF24L01P(nrf24l01+)从入门到使用
目录
NRF24L01+硬件资源
工作模式
接收地址与发送地址的理解
一对一模式(一收一发)
多对一模式(六发一收)
使用ACK自动回复带数据功能
NRF24L01+硬件资源

运行条件:
电压:最小值=1.9V;典型值=3.0V;最大值=3.6V; 有一些反映不小心接入5V的电,烧模块,只是经验,值得注意。如果要接入5V,需要使用电阻进行分压,可通过U=RI进行计算。 工作温度:-40℃——85℃。典型值=27℃
工作模式

上电之后,要等待100ms的时间让其渡过上电不稳定状态,进入TX/RX模式时,有130微秒的等待时间,一定要让PLL准备好,不然数据有可能乱码。
下图中,黑色粗框是官方推荐的模式转换线路,虚框是过渡状态,该状态下一定会转换到下一个状态。
接收地址与发送地址的理解
PTX端(发射端)需要用到的地址:TX_ADDR和RX_ADDR_P0。(使用P0通道进行通信,使用其他通道x,地址就写:RX_ADDR_Px。)
PRX端(接收端)需要用到的地址:RX_ADDR_P0。(使用P0通道进行通信或者Px)
PTX的职责:1、发送数据给接收端(PRX);2、接收PRX的应答信号(ACK)
PRX的职责:1、接收发送端的发送数据;2、发送应答信号(ACK)给PTX
所以:
①当我们写入5个字节的地址在TX_ADDR中时,PTX以TX_ADDR中的地址为目标,把FIFO中的数据发送到空中;
②PRX在空中收到信号后,把目的地址拿出来与RX_ADDR_P0中的地址对比(自动进行),匹配则说明时发送给自己的,并接收;
③PRX通道RX_ADDR_P0回复ACK;
④PTX接收ACK,目的地址与自身的RX_ADDR_P0对比,一致,则说明ACK发送给自己,最后确认收到ACK应答信号,通讯完成。
一对一模式(一收一发)
拿stm32f103为例,其他芯片可以参考其思路。
1、启用外设时钟:SPI1、GPIOA、AFIO(开启中断时)、USART1(使用串口时)
2、初始化SPI1的IO引脚,外部中断,串口
void GPIO_SPI1_Init(void) //SPI1引脚初始化
{
GPIO_InitTypeDef pa;
pa.GPIO_Mode=GPIO_Mode_AF_PP; //SCK(pa5)、MOSI(pa7)推挽复用
pa.GPIO_Pin=GPIO_Pin_5|GPIO_Pin_7;
pa.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&pa);
pa.GPIO_Mode=GPIO_Mode_IPU;
pa.GPIO_Pin=GPIO_Pin_6|GPIO_Pin_1; //MISO(pa6)、IRQ(pa1)上拉输入
pa.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&pa);
pa.GPIO_Mode=GPIO_Mode_Out_PP;
pa.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_4; //CE(pa2)、CSN(pa4)推挽输出
pa.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&pa);
GPIO_SetBits(GPIOA,GPIO_Pin_7|GPIO_Pin_4);
GPIO_ResetBits(GPIOA,GPIO_Pin_5);
}void EXTI1_Init(void) //外部中断初始化相关
{
EXTI_InitTypeDef exti1;
NVIC_InitTypeDef nvic;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource1);
exti1.EXTI_Line=EXTI_Line1;
exti1.EXTI_LineCmd=ENABLE;
exti1.EXTI_Mode=EXTI_Mode_Interrupt;
exti1.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&exti1);
nvic.NVIC_IRQChannel=EXTI1_IRQn;
nvic.NVIC_IRQChannelCmd=ENABLE;
nvic.NVIC_IRQChannelPreemptionPriority=2;
nvic.NVIC_IRQChannelSubPriority=2;
NVIC_Init(&nvic);
}void USART1_Init(void) //串口初始化相关
{
GPIO_InitTypeDef pa9,pa10;
USART_InitTypeDef usart1;
pa9.GPIO_Mode=GPIO_Mode_AF_PP;
pa9.GPIO_Pin=GPIO_Pin_9;
pa9.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&pa9);
pa10.GPIO_Mode=GPIO_Mode_IN_FLOATING;
pa10.GPIO_Pin=GPIO_Pin_10;
pa10.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&pa10);
usart1.USART_BaudRate=9600;
usart1.USART_HardwareFlowControl=USART_HardwareFlowControl_None;
usart1.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;
usart1.USART_Parity=USART_Parity_No;
usart1.USART_StopBits=USART_StopBits_1;
usart1.USART_WordLength=USART_WordLength_8b;
USART_Init(USART1,&usart1);
USART_Cmd(USART1,ENABLE);
}3、初始化SPI1,并使能。
void SPI1_Init(void)
{
SPI_InitTypeDef spi1;
spi1.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_16;
spi1.SPI_CPHA=SPI_CPHA_1Edge;
spi1.SPI_CPOL=SPI_CPOL_Low;
spi1.SPI_CRCPolynomial=7;
spi1.SPI_DataSize=SPI_DataSize_8b;
spi1.SPI_Direction=SPI_Direction_2Lines_FullDuplex;
spi1.SPI_FirstBit=SPI_FirstBit_MSB;
spi1.SPI_Mode=SPI_Mode_Master;
spi1.SPI_NSS=SPI_NSS_Soft;
SPI_Init(SPI1,&spi1);
SPI_Cmd(SPI1,ENABLE);
}4、初始化模块,进入Standby-I模式
void NRF24L01_TX_Init(void)
{
TX_CE=0;
TX_CSN=1;
}
/*
*TX_CE、TX_CSN已经通过宏定义到指定F103上的引脚。CE为工作模式选择,CSN为片选
*
/5、配置模块工作状态,根据CONFIG寄存器的不同,有PTX,PRX模式可选
PTX_Mode初始化步骤 24L01 相关寄存器(节点地址、通信频率、发射参数、有效数据宽度、CRC、EN_AA都要与PRX一致)
1)写 Tx 节点的地址 TX_ADDR
2)写 Rx 节点的地址(主要是为了使能 Auto Ack) RX_ADDR_P0
3)使能 AUTO ACK EN_AA
4)使能 PIPE 0 EN_RXADDR
5)配置自动重发次数 SETUP_RETR
6)选择通信频率 RF_CH
7)配置发射参数(低噪放大器增益、发射功率、无线速率) RF_SETUP
8 ) 选择通道 0 有效数据宽度 Rx_Pw_P0
9)配置 24L01 的基本参数以及切换工作模式 CONFIG
PRX_Mode初始化步骤 24L01 相关寄存器
1)写 Rx 节点的地址 RX_ADDR_P0
2)使能 AUTO ACK EN_AA
3)使能 PIPE 0 EN_RXADDR
4)选择通信频率 RF_CH
5) 选择通道 0 有效数据宽度 Rx_Pw_P0
6)配置发射参数(低噪放大器增益、发射功率、无线速率) RF_SETUP
7)配置 24L01 的基本参数以及切换工作模式 CONFIG
void NRF24L01_TX_Mode(void)
{
TX_CE=0;
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x01);
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1A);
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40);
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0F);
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0E);
TX_CE=1;
delay_us(10); //如果是连续发射,在初始化阶段就要拉高CE10us以上,一个一个包发送等到发送在拉高
}void NRF24L01_RX_Mode(void)
{
RX_CE=0;
NRF24L01_RX_WRITE_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+EN_AA,0x01);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+EN_RXADDR,0x01);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RF_CH,40);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RF_SETUP,0x0F);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+CONFIG,0x0F);
RX_CE=1;
delay_us(130); //开始进入接收模式,等待130us
}6、处理中断,并发送/接收信号
/*这是PTX端的中断函数*/
void EXTI1_IRQHandler(void)
{
u8 status;
if(EXTI_GetITStatus(EXTI_Line1)!=RESET)
{
status=NRF24L01_Read_Reg(STATUS);
NRF24L01_Write_Reg(NRF_WRITE_REG+STATUS,status);
if(status&MAX_TX)
{
NRF24L01_Write_Reg(FLUSH_TX,NOP);
printf("\r\nMAX_TX");
}
else if(status&TX_OK)
{
printf("\r\nTX_OK");
}
else
{
printf("\r\n0xF5");
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}/*这是PRX端的中断函数*/
void EXTI1_IRQHandler(void)
{
u8 status;
u8 rxbuf[32]; //在main.c文件中引用该rxbuf变量
if(EXTI_GetITStatus(EXTI_Line1)!=RESET)
{
status=NRF24L01_RX_READ_Reg(STATUS);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+STATUS,status);
printf("\r\nZD");
if(status&RX_OK)
{
NRF24L01_RX_READ_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH);
NRF24L01_RX_WRITE_Reg(FLUSH_RX,NOP);
printf("\r\n%s",rxbuf);
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
}多对一模式(六发一收)
初始化阶段,跟一对一通讯一样。唯一的区别就是在与接收通道不一样。
通道0(PX_ADDR_P0)可以写入32字节的任意地址;
通道1(PX_ADDR_P1)也可以写入32字节的任意地址,但是会对之后的P2~P5有影响;
通道2~通道5(PX_ADDR_P2~PX_ADDR_P5),在写入地址之前,一定要先写入P1的通道的地址,P2~P5高4字节地址跟P1的地址一致,低1字节可以自己手动写入。
如果要开启ACK应答,设置EN_AA与EN_RXADDR寄存器,要使用通道x,前面的x-1通道也要开启。如要使用通道3,那么通道0~通道2都要开启功能。
/*PTX端使用P2通道通讯*/
void NRF24L01_TX_Mode(void)
{
TX_CE=0;
// NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS,TX_ADR_WIDTH);
// NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
/*P1通道,TX_ADDRESS_P1是自定义的32字节数组*/
// NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS_P1,TX_ADR_WIDTH);
// NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)TX_ADDRESS_P1,RX_ADR_WIDTH);
/*P2*/
NRF24L01_Write_Buf(NRF_WRITE_REG+TX_ADDR,(u8*)TX_ADDRESS_P2,TX_ADR_WIDTH);
NRF24L01_Write_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)TX_ADDRESS_P2,TX_ADR_WIDTH);
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_AA,0x3F);
NRF24L01_Write_Reg(NRF_WRITE_REG+EN_RXADDR,0x3F);
NRF24L01_Write_Reg(NRF_WRITE_REG+SETUP_RETR,0x1A);
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_CH,40);
NRF24L01_Write_Reg(NRF_WRITE_REG+RF_SETUP,0x0F);
NRF24L01_Write_Reg(NRF_WRITE_REG+CONFIG,0x0E);
TX_CE=1;
delay_us(10); //如果是连续发射,在初始化阶段就要拉高CE10us以上,一个一个包发送就除外
}/*进入接收模式*/
void NRF24L01_RX_Mode(void)
{
RX_CE=0;
NRF24L01_RX_WRITE_Buf(NRF_WRITE_REG+RX_ADDR_P0,(u8*)RX_ADDRESS,RX_ADR_WIDTH);
NRF24L01_RX_WRITE_Buf(NRF_WRITE_REG+RX_ADDR_P1,(u8*)RX_ADDRESS_P1,RX_ADR_WIDTH); //新增P1通道地址
NRF24L01_RX_WRITE_Buf(NRF_WRITE_REG+RX_ADDR_P2,(u8*)RX_ADDRESS_P2,1); //设置P2通道地址
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+EN_AA,0x3F); //使能所有通道自动应答
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+EN_RXADDR,0x3F); //使能所有通道接收地址
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RF_CH,40);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RF_SETUP,0x0F);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+DYNPD,0x3F);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+FEATURE,0x06);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RX_PW_P0,RX_PLOAD_WIDTH);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RX_PW_P1,RX_PLOAD_WIDTH); //新增P1通道有效数据宽度
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+RX_PW_P2,RX_PLOAD_WIDTH); //新增P2通道有效数据宽度
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+CONFIG,0x0F);
RX_CE=1;
delay_us(130);
}使用ACK自动回复带数据功能
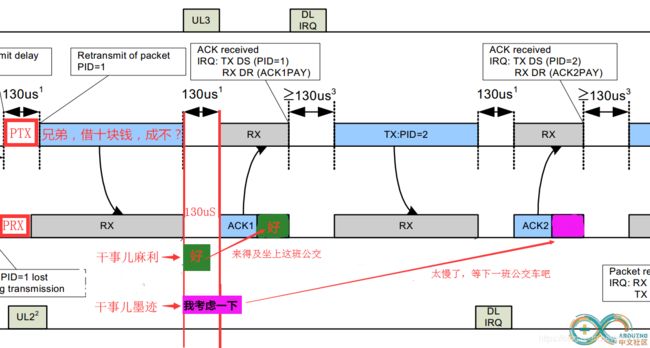
使用ACK带数据回复,是一个十分有用的功能,让PTX/PRX能交换一些数据,而不用来回切换收/发角色。
在PRX端收到数据后,MCU如果能在130us内将数据写入到FIFO寄存器中,那么在回复ACK信号时,会将FIFO内的数据带上,传输回去给PTX,以下图形象的说明了经过。
配置过程,其他跟上面一样,区别在于启用ACK回复带数据功能
发送端和接收端配置要一致:
▝ 启用DPL功能,DYNPD寄存器写0x3F,开启所有通道
▝ 启用FEATURE寄存器,写0x06,激活DPL,EN_ACK_PAY
以下接收端设置:
使用W_ACK_PAYLOAD命令(10101xxx)在130us内,在对应通道写入回复数据
0xA8:通道0 0xAB:通道3
0xA9:通道1 0xAC:通道4
0xAA:通道2 0xAD:通道5
/*进入接收模式*/
void NRF24L01_RX_Mode(void)
{
RX_CE=0;
......
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+DYNPD,0x3F); //开启所有通道
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+FEATURE,0x06); //激活DPL,EN_ACK_PAY
......
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+CONFIG,0x0F);
RX_CE=1;
delay_us(130);
}
/*PRX端的ACK回复*/
void EXTI1_IRQHandler(void)
{
u8 status,receive_length;
u8 ack_buf[32]={0x41,0x42,0x43,0x44,0x45,0x46,0x47,0x48,0x49,0x4A,0x4B,0x4C,0x4D,0x4E,0x4F,0x50,0x51,0x52,0x53,0x54,0x55,0x56,0x57,0x58,0x59,0x5A,0x5B,0x5C,0x5D,0x5E,0x60,0x61};
if(EXTI_GetITStatus(EXTI_Line1)!=RESET)
{
status=NRF24L01_RX_READ_Reg(STATUS);
NRF24L01_RX_WRITE_Reg(NRF_WRITE_REG+STATUS,status);
printf("\r\nZD");
if(status&RX_OK)
{
NRF24L01_RX_WRITE_Buf(0xAA,ack_buf,32); //在P2通道写入ack_buf
NRF24L01_RX_READ_Buf(RD_RX_PLOAD,rxbuf,RX_PLOAD_WIDTH); //读取接收数据
NRF24L01_RX_WRITE_Reg(FLUSH_RX,NOP); //刷新接收缓存
printf("\r\n%s",rxbuf); //打印接收到的数据
}
EXTI_ClearITPendingBit(EXTI_Line1);
}
} ART回复时间
在2Mbps模式下,ack有效载荷大于15字节,则ARD必须大于500us
在1Mbps模式下,ack有效载荷大于5字节,则ARD必须大于500us
在250kbps模式下,不论有没有有效载荷,ARD必须大于500us
对于250kbps模式,ART时间表如下:
| ART |
ACK有效载荷 |
| 1500us |
全部有效载荷 |
| 1250us |
≦24 |
| 1000us |
≦16 |
| 750us |
≦8 |
| 500us |
空载荷也要预留时间 |