车载导航仪的基本机能概要
整理一下我目前知道的导航仪的基本机能概要及其基本原理
1.导航
1.1.车载导航的历史
1.2.地图构成
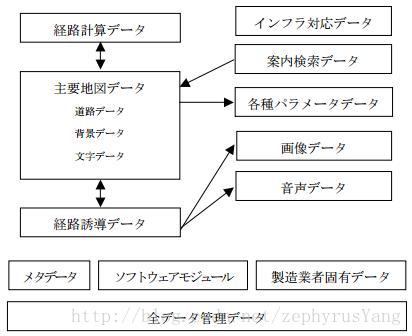
日本车载导航仪使用的地图格式主要是各厂商基于一种叫做KIWI的地图格式进行改善做成的。
(官网:http://www.kiwi-w.org/index.html)
数据的基本构成如下:
(可以在右边的地址在线浏览:http://www.jisc.go.jp/app/pager?id=1615015)
1.3.地图显示
1.4.现在地位置计算
根据当前的GPS位置,车速,加速度,角速度等情报,结合行走轨迹与地图上的道路形状的比较来进行现在地位置的计算。
进年对行走道路的画像识别技术等也被利用于提高现在地位置计算的精度。
同时,通过对行走轨迹的采集,可以实现地图上没有的新道路的发现。比如说WAZE(https://www.waze.com/)。
1.5.POI检索
1.6.路径探索
1.6.1.基本原理
1.6.2.基本道路探索(最优,第二最优,高速优先,距离优先,一般路优先,油耗优先,料金优先等)
1.6.3.偏离道路时的自动再探索
1.6.4.交通情报变更时的自动再探索
1.6.5.路径学习
1.6.6.路径提案
1.7.路径案内
1.8.交通情报
2.多媒体机能
2.1.多媒体概要
a.FM,AM,DTV
b.DVD,CD,VCD
c.IPOD,BT,VTR
d.SD,USB(MP3,WMA,ACC等格式)
2.2.设定机能
可以对EQ,SFC(临场感),POS(声音焦点),声音大小
2.3.声音,映像竞合
车载机的音声和映像基本可以分成基本型(FM,IPOD,地图)和切入型(案内,HF等)两种。
基本或者切入音声(or映像)a再生中切入音声(or映像)b发生时的动作,可以分成4类:a胜b待机,a胜b取消,b胜a复归,b胜a取消等
优先级如下:
3.车辆情报
3.1.车辆维护情报
3.2.胎压情报
3.3.油耗情报
3.4.空调等
3.5.Help Net
3.其他车载机能:
3.1.倒车摄像头
3.2.ECO
3.3.ETC
3.4.HF
3.5.软件更新
3.6.DAIG
4.与手机的连接
4.1.BT(无线蓝牙免提)
4.2.智能手机连携
4.2.1.MirrorLink
MirrorLink是可以用于实现车载机和智能手机的互联的一种协议。主要是由目前使用广泛的一些标准协议(UpnP,VNC,RTP,Bluetooth等)构成的
目的是让用户可以通过车载机直接使用智能手机上的特定APP,同时向智能手机提供汽车情报以便其实现车载应用。
其官网是:http://www.mirrorlink.com/
4.2.2.Miracast
4.2.3.CarPlay(iOS)
4.2.4.各厂商各自的协议(Sync,NaviCon等)
5.车辆连携:
5.1.辅助换挡
5.2.逆行警告
5.3.刹车助力
6.HMI(Human Machine Interface)相关:
6.1.基本概念和原则
6.1.1.能靠直觉操作的设计,支持多语言的布局
一般用户的操作可以分为4种类型:目的的选择,实现手段的选择,候选项的选择,实现目的
设计画面时,首先把画面分类,然后每类的画面进行按统一的风格设计,以让用户靠直觉知道做什么操作
6.1.2.画面层次
车载画面基本可以分为下面的四个层次
a·ONS:ONS,空调状态,时间等
b·覆盖画面:画质调整等
c·基本画面:地图操作画面,DTV画面,设定画面等
d·切入画面:倒车画面,警告画面,HF画面,路径案内画面等
6.1.3.行走时的制约
a.行走时不能显示全画面的映像,因此行走时应该自动切入地图画面(或者每个mode的基本画面?)
b.行走时不能显示过于复杂的文字
6.1.4.昼夜显示的切换
6.2.触摸屏
6.3.方向盘键
6.4.按钮,旋钮
6.5.遥控器
6.6.声音识别
6.7.AR