《强化学习Sutton》读书笔记(六)——n步Bootstrapping(n-step Bootstrapping)
此为《强化学习》第七章 n-step Bootstrapping 。
n n 步Bootstrapping是MC和TD(0)的综合。随着对参数 n n 的调整,我们可以看到TD是如何过渡到MC的。而最佳的方法往往就是介于TD和MC之间。
n n 步TD估计
在上一章的TD(0)方法中,我们有
并且,我们使用了一步后的状态值函数来估计 Gt G t ,从而得到
那么如果我们考虑 n n 步,那么显然 Gt G t 也可以使用以下等式进行估计:
在书本中,上面每个 v v 都会有一个下标,表示此处的值函数是哪一步迭代的值函数。 但实际上,我们只有一个表格用来存值函数,所以实践上应该很容易知道到底是哪一步迭代的,因此这里省略不写(可见下文伪代码即可知)。令上述表达式为 Gt:t+n G t : t + n ,则算法TD(n)为
如果 t+n=T t + n = T ,那么TD(n)将成为MC。在回溯图中,我们可以看到TD(n)包含了从TD(0)到MC的所有算法。

TD(n)的伪代码如下:
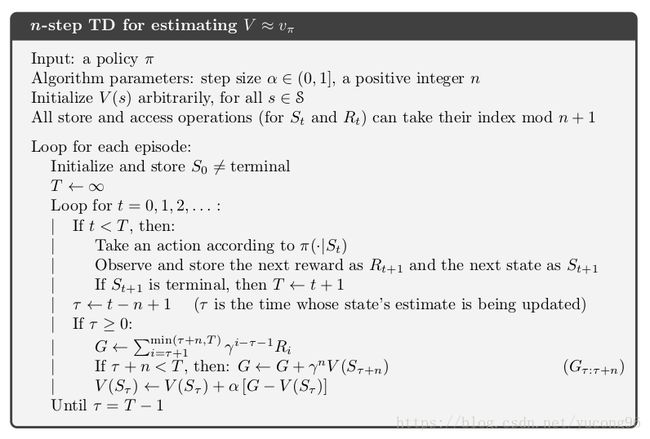
稍微解释一下。第一个循环当然是针对episode,第二个循环是在一个episode中产生样本。第一个if表示如果该episode没有结束,那么就继续采样;if后的 τ τ 表示已经执行的步数和 n−1 n − 1 的差。如果 τ<0 τ < 0 ,就说明 n n 步还没有走完,当然没有任何可以迭代的;如果 τ≥0 τ ≥ 0 ,则进入第二个if,使用 n n 步后的状态值函数 v(Sτ+n) v ( S τ + n ) 来更新 v(Sτ) v ( S τ ) 。
n n 步Sarsa
考虑完状态值函数,下一步当然是行为值函数。过程几乎完全一样,先定义 Gt:t+n G t : t + n :
因此 n n 步Sarsa更新表达式为:
它的回溯图如下:

伪代码如下:

和之前TD(n)相比,除了值函数的变化,唯一的不同是增加了策略改良的步骤(倒数第二行),但这只是一个非常熟悉的 ϵ ϵ -贪心而已,毕竟Sarsa只是一个On-Policy的算法。
我们也可以尝试扩展Expected Sarsa到 n n 步。从下面的回溯图中可以看到,Expected Sarsa仅仅在最后一步使用了值函数的期望,并没有每一步都使用。我猜想可能是因为如果每一步都做成期望,那么随着树的展开,计算量将指数级增长。不过我不清楚是否存在两步使用期望的Expected Sarsa算法。

表达式如下:
n n 步Off-Policy学习
在MC一章中第一次提出Off-Policy方法的时候,我们需要求解一个重要性采样系数。当时由于是MC方法,因此需要求 ρt:T−1 ρ t : T − 1 ,而在 n n 步的方法中,只需要求解 ρt:t+n−1 ρ t : t + n − 1 ,但过程是极其类似的。
在每次更新值函数的时候,我们需要乘上 ρt+1:t+n ρ t + 1 : t + n ,即
在MC一章中,我们提到过普通重要性采样和加权重要性采样。我个人认为,这里这样的更新式应该是基于普通重要性采样的。照抄一下第四篇里基于加权重要性的公式:
这里的 W W 几乎就是这章中的 ρ ρ ,但显然没有对应的 Cn=∑nk=1Wn C n = ∑ k = 1 n W n 。如果考虑基于普通重要性采样,那么把上式中的分母去掉就好了,另外 α α 实际上对应这经过状态 s s 的次数,这样两边就说得通了。
n n 步Off-Policy方法的伪代码如下:

注意决策(目标策略)使用的是纯贪心,而数据生成(行为策略)使用的是探索性的策略。
* 单次决策法与决策变量
略。
不带重要性采样的 n n 步Off-Policy学习
在上一章中,我们已经看到像Q-Learning或者Off-Policy的Expected Sarsa都没有重要性采样的步骤,这能在 n n 步Off-Policy中实现吗?本节中我们将介绍具有这样性质的树回溯 (Tree Backup) 算法。
树回溯算法的回溯图如下所示(以3步为例)。

可以看到,树回溯的最后一步和一步Expected Sarsa是一致的,即一层的树回溯法得到的回报为
两层的树回溯法就有点不同了,在倒数第二层的分支中,每个实际中不会被选择的行为值函数将被计入回报,而实际中选择的行为将作为下一层的回报间接计入,即
这里的表达式启示我们可以用递归的方法来定义和求解 Gt:t+n G t : t + n ,即
于是更新行为值函数的表达式为
在阅读这一节时,我有好几个疑问。首先,注意到 π π 是纯贪心得到的,因此上述式子中许多 π(a|s) π ( a | s ) 将等于0,一方面树看起来将变成棍子,另一方面由于行为策略 b b 不一定选择了 π π 认定最优的路线,因此树高也可能发生变化。我一度认为这看起来是不合理的,把它们都改成了 b b 。然而,改成 b b 之后,这将不再是一个Off-Policy的方法了。因此,我认为这里确实应该是 π π ,也确实会出现许多的0,使用 π(a|s) π ( a | s ) 只是另一种形式的最大化。
第二个问题是,为什么树回溯法是Off-Policy的?在每一步选择中,数据(具体的行为)都是由行为策略 b b 来生成的,但更新的算法隐含了最大化,因此和Q-Learning一样,它是按照目标策略 π π 来更新值函数的。假如 n n 步的中间某一步不是最优的,那么它下面的树的权重将全是0,不会对值函数产生影响。需要注意的是,在2017年草稿及以前的版本中,伪代码里使用了 ϵ ϵ -贪心的算法来生成 π π ,我认为这是不对的(这样就是On-Policy方法了),且已在2018年草稿中得到更正。
第三个问题是,为什么这样就不需要重要性采样了?我个人的理解是,和Q-Learning类似,采用重要性采样的根本原因是避免行为策略 b b 做出一些非常差的行为,从而拉低了上一行为的值函数,而实际上目标策略 π π 却根本不会考虑这样差的行为(可见上一章)。这里,我们使用了目标策略 π π 作为更新的算法,通过隐含的最大化去掉了可能的差行为对上一行为的影响,所以就不需要重要性采样了。
n步树回溯法伪代码如下:

* 一种统一的算法:n步Q( σ σ )
略。
参考文献
《Reinforcement Learning: An Introduction (second edition)》Richard S. Sutton and Andrew G. Barto
上一篇:《强化学习Sutton》读书笔记(五)——时序差分学习(Temporal-Difference Learning)
下一篇:暂无