一文搞懂ADC裸机和基于Linux驱动编写方法
前言
在嵌入式开发中,ADC应用比较频繁,本文主要讲解ADC的基本原理以及如何编写基于ARM的裸机程序和基于Linux的驱动程序。
ARM架构:Cortex-A9
Linux内核:3.14
在讲述ADC之前,我们需要先了解什么是模拟信号和数字信号。
模拟信号
主要是与离散的数字信号相对的连续的信号。模拟信号分布于自然界的各个角落,如每天温度的变化,而数字信号是人为的抽象出来的在时间上不连续的信号。电学上的模拟信号是主要是指幅度和相位都连续的电信号,此信号可以被模拟电路进行各种运算,如放大,相加,相乘等。
模拟信号是指用连续变化的物理量表示的信息,其信号的幅度,或频率,或相位随时间作连续变化,如目前广播的声音信号,或图像信号等。
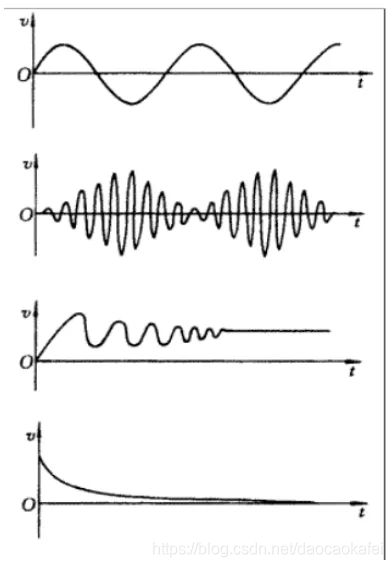
如下图所示从上到下一次是正弦波、 调幅波、 阻尼震荡波、 指数衰减波 。
数字信号
数字信号指幅度的取值是离散的,幅值表示被限制在有限个数值之内。二进制码就是一种数字信号。二进制码受噪声的影响小,易于有数字电路进行处理,所以得到了广泛的应用。
数字信号:高清数字电视,MP3,JPG,PNG文件等等。

优点:
1. 抗干扰能力强、无噪声积累
在模拟通信中,为了提高信噪比,需要在信号传输过程中及时对衰减的传输信号进行放大,信号在传输过程中不可避免地叠加上的噪声也被同时放大。
随着传输距离的增加,噪声累积越来越多,以致使传输质量严重恶化。
对于数字通信,由于数字信号的幅值为有限个离散值(通常取两个幅值),在传输过程中虽然也受到噪声的干扰,但当信噪比恶化到一定程度时,
即在适当的距离采用判决再生的方法,再生成没有噪声干扰的和原发送端一样的数字信号,所以可实现长距离高质量的传输。
2. 便于加密处理
信息传输的安全性和保密性越来越重要,数字通信的加密处理的比模拟通信容易得多,以话音信号为例,经过数字变换后的信号可用简单的数字逻辑运算进行加密、解密处理。
3. 便于存储、处理和交换
数字通信的信号形式和计算机所用信号一致,都是二进制代码,因此便于与计算机联网,也便于用计算机对数字信号进行存储、处理和交换,
可使通信网的管理、维护实现自动化、智能化。
4. 设备便于集成化、微型
数字通信采用时分多路复用,不需要体积较大的滤波器。设备中大部分电路是数字电路,可用大规模和超大规模集成电路实现,因此体积小、功耗低。
5. 便于构成综合数字网和综合业务数字网
采用数字传输方式,可以通过程控数字交换设备进行数字交换,以实现传输和交换的综合。
另外,电话业务和各种非话业务都可以实现数字化,构成综合业务数字网。
6. 占用信道频带较宽
一路模拟电话的频带为4kHz带宽,一路数字电话约占64kHz,这是模拟通信目前仍有生命力的主要原因。随着宽频带信道(光缆、数字微波)的大量利用(一对光缆可开通几千路电话)以及数字信号处理技术的发展(可将一路数字电话的数码率由64kb/s压缩到32kb/s甚至更低的数码率),数字电话的带宽问题已不是主要问题了。
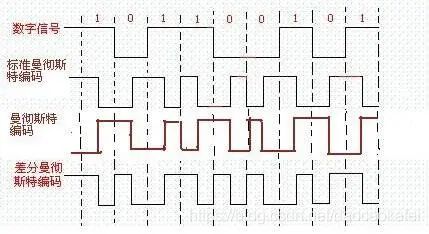
常用的数字信号编码有不归零(NRZ)编码、 曼彻斯特(Manchester)编码和差分曼彻斯特(Differential Manchester)编码。
数字信号与模拟信号的转化
模拟信号和数字信号之间可以相互转换:模拟信号一般通过PCM脉码调制(Pulse Code Modulation)方法量化为数字信号,
即让模拟信号的不同幅度分别对应不同的二进制值,例如采用8位编码可将模拟信号量化为2^8=256个量级,实用中常采取24位或30位编码;
数字信号一般通过对载波进行移相(Phase Shift)的方法转换为模拟信号。计算机、计算机局域网与城域网中均使用二进制数字信号,
目前在计算机广域网中实际传送的则既有二进制数字信号,也有由数字信号转换而得的模拟信号。但是更具应用发展前景的是数字信号。
PCM脉冲编码调制
脉冲编码调制就是把一个时间连续,取值连续的模拟信号变换成时间离散,取值离散的数字信号后在信道中传输。
脉冲编码调制就是对模拟信号先抽样,再对样值幅度量化, 编码的过程。
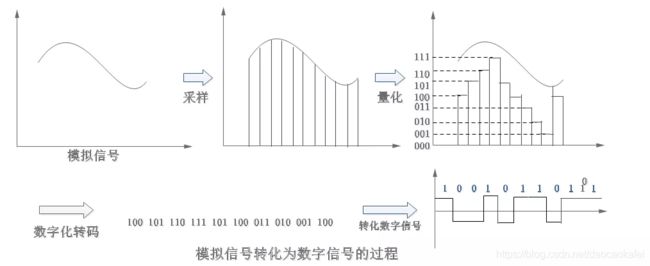
抽样:
就是对模拟信号进行周期性扫描,把时间上连续的信号变成时间上离散的信号。
该模拟信号经过抽样后还应当包含原信号中所有信息,也就是说能无失真的恢复原模拟信号。
量化:
就是把经过抽样得到的瞬时值将其幅度离散,即用一组规定的电平,把瞬时抽样值用最接近的电平值来表示,通常是用二进制表示。
编码:
就是用一组二进制码组来表示每一个有固定电平的量化值。然而,实际上量化是在编码过程中同时完成的,故编码过程也称为模/数变换,可记作A/D。
ADC
ADC,Analog-to-Digital Converter的缩写,指模/数转换器或者模数转换器。是指将连续变化的模拟信号转换为离散的数字信号的器件。真实世界的模拟信号,例如温度、压力、声音或者图像等,需要转换成更容易储存、处理和发射的数字形式。模/数转换器可以实现这个功能,在各种不同的产品中都可以找到它的身影。
ADC最早用于对无线信号向数字信号转换。如电视信号,长短播电台发接收等。
与之相对应的DAC,Digital-to-Analog Converter,它是ADC模数转换的逆向过程。
现在市场上的电子产品都集成了传感器,传感器要采集数据,他的内部结构里就一定要用到ADC,常见的传感器如下:
温湿度:温度传感器,DHT11
声音:音频芯片进行录音,WM8906
图像:索尼IMX386/IMX283传感器
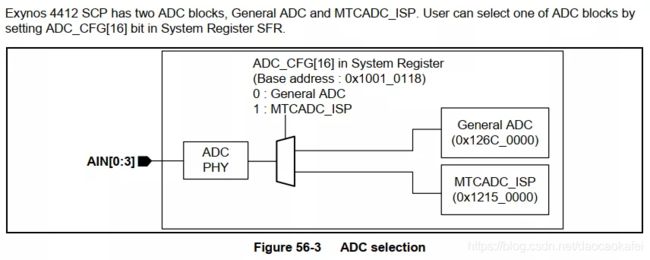
Exynos4412 A/D转换器
三星的Exynos4412模块结构图如下所示:
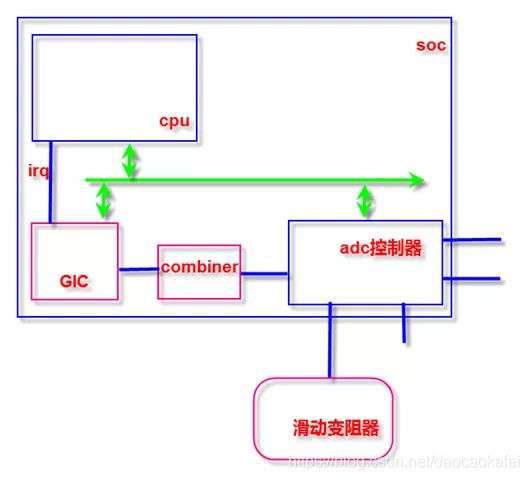
Adc控制器集成在exynos4412 soc中,控制器内部有一根中断线连接到中断控制器combiner,然后路由到GIC(Generic Interrupt Controller),滑动变阻器连接到adc控制器的通道3。
ADC控制器
参考《Exynos 4412 SCP》 的datasheet。
ADC控制器是10位或12位CMOS再循环式模拟数字转换器,它具有10个通道输入,并可将模拟量转换至10位或12位二进制数。5Mhz A/D 转换时钟,最大1Msps的转换速度。A/D转换具备片上采样保持功能,同时也支持待机工作模式。
ADC接口包括如下特性。
- 10bit/12bit输出位可选。
-
微分误差 1.0LSB。 -
积分误差 2.0LSB。 -
最大转换速率5Msps. -
功耗少,电压输入1.8V。 -
电压输入范围 0~1.8V。 -
支持偏上样本保持功能。 -
通用转换模式。
模块图
4412 A/D转换器的控制器接口框图如下:

原理我们并不需要关注,知道即可。
通道选择
由上图可知,A/D控制器一共有4个通道,通用寄存器地址为0x126c0000。
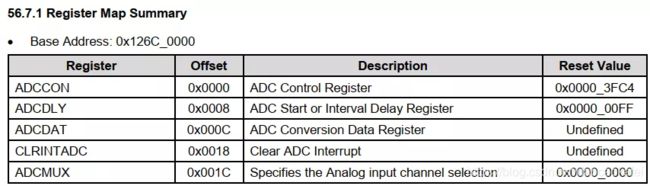
A/D控制器寄存器
对ADC控制器的操作主要是通过配置寄存器来实现的,查看datasheet,必须掌握寄存器的使用。
以下是A/D控制器寄存器汇总。
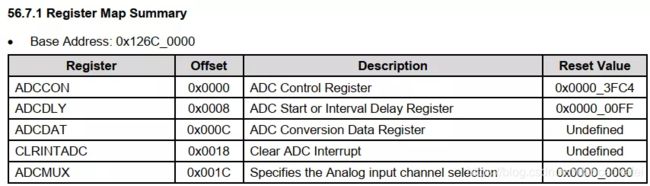
1、A/D控制寄存器ADCCON

RES : 选择A/D转换精度,0:划分成1024份 1:划分成4096份
ECFLG :转换是否结束 0:转换中 1:转换完毕;对于轮询模式需要根据该位判断数据是否转换完毕。
PRSCEN:A/D转换预分频是否使能
PRSCVL:预分频的值,转换公式见下面
STANDBY:待机模式 0:正常工作模式 1:待机模式。处于待机模式时要将PRSCEN设置为0
READ_START: A/D转换由读操作触发,设置为1后,每次读取A/D值的操作都会触发一次A/D转换。
ENABLE_START: 单次开启A/D转换,转换完毕后该位自动清零,当READ_START设置为1的时候,该位无效。
通常设置值为(1 << 16 | 1 << 14 | 99 <<6 | 1 << 1)。
2、A/D转换数据寄存器ADCDAT0
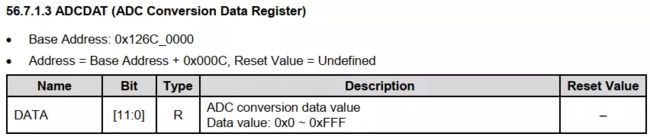
注意该寄存器的值只有低12位有效。
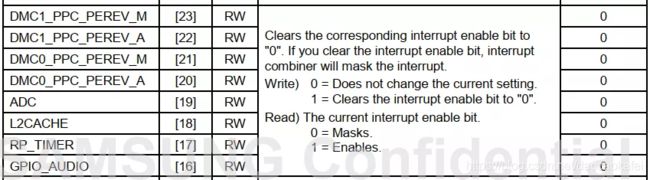
3、A/D清中断寄存器CLRINTADC

黄色部分可知,中断例程负责清中断,中断结束后写入任意值就可以清中断。
4、A/D通道选择寄存器ADCMUX

每次操作都要先设置通道,因为 4个通道是共用同一套寄存器,如果有其他任务也在使用A/D,就会产生混乱。
在此我们选择通道3,置3即可。
5、ADC中断ID
参见9.2.2GIC Interrupt Table

由此可知,ADC中断号对应的SPI值是10,inturrupt ID 为42。
对于终端查询方式和编写终端的驱动需要知道SPI id和inturrupt ID,后面讲解基于Linux驱动还会再分析设备树节点如何填写。
6、Combiner中断控制器

combiner的配置寄存器:IMSRn、IECRn、ISERn、ISTRn,类似于GPIO 对中断源分组。只有中断模式才需要考虑combiner中断控制器的操作。
7、Combiner分组
参考章节:10.2.1Interrupt Combiner
Table 10-1Interrupt Groups of Interrupt Combiner
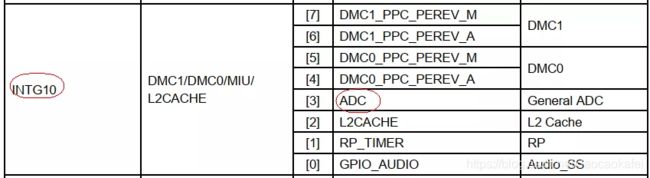
可见ADC在INTG10,即第10组。
8、Combiner IESR2
参考章节:10.4.2.9IESR2

如果要用中断模式设置为1即可。
9、Combiner IECR2
参考章节:10.4.2.10IECR2
此处用于关闭中断,采用默认值即可,注意,如果设置了1,那么中断功能就关闭了。
10、A/D转换的转换时间计算
例如:PCLK为100MHz,PRESCALER = 65 ;所有10位转换时间为
100MHz/(99+1) = 1MHz
转化时间为1/(1MHz/5 cycles) = 5us。
完成一次A/D转换需要5个时钟周期。A/D转换器的最大工作时钟为5MHz,所以最大采样率可以达到1Mit/s.
电路连接图

由该电路图可知,外设是一个滑动变阻器,根据接触点的不同,会导致输入电压的模拟值不同。连接的A/D控制器通道为3。
该电路利用一个电位计输出电压到4412的AIN3管脚。输入的电压范围为0~1.8V。
ADC裸机开发程序实例
ADC数据的读取通常由2种方法:中断模式、轮训模式。
轮训模式
轮询模式读取数据步骤如下:
-
1.要读取数据首先向ADC寄存器ADCCON的bit:1写1,发送转换命令,采用读-启动模式来开启转换。
-
2.当ADC控制器转换完毕会将ADCCON的bit:15设置为1,
-
3.轮询检测ADCCON的bit:15是否设置为1,如果设置为1,就读走数据,否则继续等待。
这种方式比较占用CPU资源。
//注:这里使用读-启动模式
/***********************ADC ******************/
#define ADC_CFG __REG(0x10010118)
#define ADCCON __REG(0x126C0000)
#define ADCDLY __REG(0x126C0008)
#define ADCDAT __REG(0x126C000C)
#define CLRINTADC __REG(0x126C0018)
#define ADCMUX __REG(0x126C001C)
#include "exynos_4412.h"
#include "pwm.h"
#include "uart.h"
unsigned char table[10] = {
'0','1','2','3','4','5','6','7','8','9'};
void mydelay_ms(int time)
{
int i, j;
while(time--)
{
for (i = 0; i < 5; i++)
for (j = 0; j < 514; j++);
}
}
adc_init(int temp)
{
ADCCON = (1 << 16 | 1 << 14 | 99 <<6 | 1 << 1);
ADCMUX = 3;
temp = ADCDAT & 0xfff;
}
/*
* 裸机代码,不同于LINUX 应用层, 一定加循环控制
*/
int main (void)
{
unsigned char bit4,bit3,bit2,bit1;
unsigned int temp = 0;
uart_init();
adc_init(temp);
puts("开始转换\n");
while(1)
{
while(!(ADCCON & 0x8000));
temp = ADCDAT & 0xfff;
printf("U = %d\n",temp);
temp = 1.8 * 1000 * temp/0xfff;
bit4 = temp /1000;
putc(table[bit4]);
bit3 = (temp % 1000)/100?;
putc(table[bit3]);
bit2 = ((temp % 1000)%100)/10;
putc(table[bit2]);
bit1 = ((temp % 1000)%100)%10;
putc(table[bit1]);
puts("mV");
putc('\n');
mydelay_ms(1000);
}
return 0;
}
中断模式
中断模式读取数据步骤如下:
- 1.要读取数据首先向ADC寄存器ADCCON的bit:0写1,发送转换命令;
- 2.当ADC控制器转换完毕会通过中断线向CPU发送中断信号;
- 3.在中断处理函数中,读走数据,并清中断.
注:中断对应寄存器的设置,后续会更新对应的文档。
void do_irq(void)
{
int irq_num;
irq_num = CPU0.ICCIAR &0x3ff;
switch(irq_num)
{
case 42:
adc_num = ADCDAT&0xfff;
printf("adc = %d\n",adc_num);
CLRINTADC = 0;
// IECR2 = IECR2 | (1 << 19); 打开的话只能读取一次,
//42/32
ICDICPR.ICDICPR1 = ICDICPR.ICDICPR1 | (1 << 10);【清GIC中断标志位类似于 ICDISER】
break;
}
CPU0.ICCEOIR = CPU0.ICCEOIR & (~0x3ff) | irq_num;
}
void adc_init(void)
{
//12bit 使能分频 分频值 手动
ADCCON = (1 << 16) | (1 << 14) | (0xff << 6) | (1 << 0);
ADCMUX = 3;
}
void adcint_init(void)
{
IESR2 = IESR2 | (1 << 19);
ICDDCR = 1; //使能分配器
//42/32
ICDISER.ICDISER1 = ICDISER.ICDISER1 | (1 << 10);//使能相应中断到分配器
ICDIPTR.ICDIPTR10 = ICDIPTR.ICDIPTR10 &(~(0xff << 16)) | (0x1 << 16);//发送到相应CPU接口
CPU0.ICCPMR = 255;//设置中断屏蔽优先级
CPU0.ICCICR = 1; //全局使能开关
}
int main (void)
{
adc_init();
adcint_init();
while(1)
{
ADCCON = ADCCON | 1;
delay_ms(1000);
}
return 0;
}
基于Linux驱动编写
设备树
编写基于Linux的ADC外设驱动,首先需要编写设备树节点信息,在裸机程序中,我们只用到了寄存器地址,而编写基于Linux的驱动,我们需要用到中断功能。所以编写设备树节点需要知道ADC要用到的硬件资源主要包括:寄存器资源和中断资源。
关于中断的使用我们在后续文章中会继续分析,现在我们只需要知道中断信息如何填写即可。
ADC寄存器信息填写
由上可知,寄存器基地址为0x126c0000,其他寄存器只需要根据基地址做偏移即可获取,所以设备树的reg属性信息如下:
reg = <0x126C0000 0x20>;
ADC中断信息填写
描述中断连接需要四个属性:
父节点提供以下信息
interrupt-controller - 一个空的属性定义该节点作为一个接收中断信号的设备。
interrupt-cells - 这是一个中断控制器节点的属性。它声明了该中断控制器的中断指示符中【interrupts】 cell 的个数(类似于 #address-cells 和 #size-cells)。
子节点描述信息
interrupt-parent - 这是一个设备节点的属性,包含一个指向该设备连接的中断控制器的 phandle。那些没有 interrupt-parent 的节点则从它们的父节点中继承该属性。
interrupts - 一个设备节点属性,包含一个中断指示符的列表,对应于该设备上的每个中断输出信号。【设备的中断信息放在该属性中】
父节点

首先我们必须知道ADC控制器的中断线的父节点:
由上图可知ADC控制器位于soc内,4个ADC通道公用一根中断线,该中断线连接在combiner上,所以我们需要查找到combiner这个父节点的说明:
进入设备树文件所在目录:arch\arm\boot\dts
grep combiner *.* -n
经过筛选得到以下信息,

因为我们使用的板子是exynos4412,而exynos系列通用的平台设备树文件是exynos4.dtsi,查看该文件:

上图列举了combiner控制器的详细信息:
interrupt-cells ;
interrupt-cells =<2>;
所以ADC控制器中断控制器的interrupts属性应该有两个cell。
interrupts属性填写
而设备的中断信息填写方式由内核的以下文档提供:
Documentation\devicetree\bindings\interrupt-controller\interrupts.txt
69. b) two cells
70. ------------
71. The #interrupt-cells property is set to 2 and the first cell 72. defines the
73. index of the interrupt within the controller, while the second cell is used
74. to specify any of the following flags:
75. - bits[3:0] trigger type and level flags
76. 1 = low-to-high edge triggered
77. 2 = high-to-low edge triggered
78. 4 = active high level-sensitive
79. 8 = active low level-sensitive
由以上信息可知,中断的第一个cell是该中断源所在中断控制器的index,第二个cell表示中断的触发方式
*. 1:上升沿触发
*. 2:下降沿触发
*. 3:高电平触发
*. 4:低电平触发
那么index应该是多少呢?
详见datasheet的9.2.2 GIC Interrupt Table 节:

此处我们应该是填写左侧的SPI ID:10 还是填写INTERRUPT ID:42呢?
此处我们可以参考LCD节点的interrupts填写方法:
通过查找父节点为combiner的设备信息。
继续grep combiner . -n
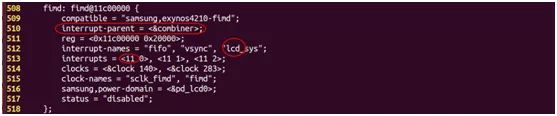
由此可见lcd这个设备的interrupts属性index值是11,所以可知ADC控制器中断线的index是10。
中断信息如下:
interrupt-parent = <&combiner>;
interrupts = <10 3>;
ADC外设设备树信息
fs4412-adc{
compatible = "fs4412,adc";
reg = <0x126C0000 0x20>;
interrupt-parent = <&combiner>;
interrupts = <10 3>;
};
本文默认大家会使用设备树,不知道如何使用设备树的朋友,后续会开一篇单独讲解设备树。
【注意】
在不支持设备树内核中,以Cortex-A8为例,中断信息填写在以下文件中
内部中断,Irqs.h (arch\arm\mach-s5pc100\include\mach)
外部中断在Irqs.h (arch\arm\plat-s5p\include\plat)
ADC属于内部中断,位于arch\arm\mach-s5pc100\include\mach\Irqs.h中。
寄存器信息填写在以下位置:
arch\arm\mach-s5pc100\Mach-smdkc100.c
static struct platform_device *smdkc100_devices[] __initdata = {
&s3c_device_adc,
&s3c_device_cfcon,
&s3c_device_i2c0,
&s3c_device_i2c1,
&s3c_device_fb,
&s3c_device_hsmmc0,
&s3c_device_hsmmc1,
&s3c_device_hsmmc2,
&samsung_device_pwm,
&s3c_device_ts,
&s3c_device_wdt,
&smdkc100_lcd_powerdev,
&s5pc100_device_iis0,
&samsung_device_keypad,
&s5pc100_device_ac97,
&s3c_device_rtc,
&s5p_device_fimc0,
&s5p_device_fimc1,
&s5p_device_fimc2,
&s5pc100_device_spdif,
};
结构体s3c_device_adc定义在以下文件:
\arch\arm\plat-samsung\Devs.c
#ifdef CONFIG_PLAT_S3C24XX
static struct resource s3c_adc_resource[] = {
[0] = DEFINE_RES_MEM(S3C24XX_PA_ADC, S3C24XX_SZ_ADC),
[1] = DEFINE_RES_IRQ(IRQ_TC),
[2] = DEFINE_RES_IRQ(IRQ_ADC),
};
struct platform_device s3c_device_adc = {
.name = "s3c24xx-adc",
.id = -1,
.num_resources = ARRAY_SIZE(s3c_adc_resource),
.resource = s3c_adc_resource,
};
#endif /* CONFIG_PLAT_S3C24XX */
#if defined(CONFIG_SAMSUNG_DEV_ADC)
static struct resource s3c_adc_resource[] = {
[0] = DEFINE_RES_MEM(SAMSUNG_PA_ADC, SZ_256),
[1] = DEFINE_RES_IRQ(IRQ_TC),
[2] = DEFINE_RES_IRQ(IRQ_ADC),
};
struct platform_device s3c_device_adc = {
.name = "samsung-adc",
.id = -1,
.num_resources = ARRAY_SIZE(s3c_adc_resource),
.resource = s3c_adc_resource,
};
#endif /* CONFIG_SAMSUNG_DEV_ADC */
由代码可知,平台驱动对应的platform_device具体内容由宏CONFIG_PLAT_S3C24XX、CONFIG_SAMSUNG_DEV_ADC来控制。
驱动编写架构和流程如下
read()
{
1、向adc设备发送要读取的命令
ADCCON 1<<0 | 1<<14 | 0X1<<16 | 0XFF<<6
2、读取不到数据就休眠
wait_event_interruptible();
3、等待被唤醒读数据
havedata = 0;
}
adc_handler()
{
1、清中断 ADC使用中断来通知转换数据完毕的
2、状态位置位;
havedata=1;
3、唤醒阻塞进程
wake_up()
}
probe()
{
1、读取中断号,注册中断处理函数
2、读取寄存器的地址,ioremap
3、字符设备的操作
}
驱动需要首先捕获中断信号后再去寄存器读取相应的数据,在ADC控制器没有准备好数据之前,应用层需要阻塞读取数据,所以在读取数据的函数中,需要借助等待队列来实现驱动对应用进程的阻塞。
驱动程序
驱动程序对寄存器的操作参考裸机程序,只是基地址需要通过ioremap()做映射,对寄存器的读写操作需要用readl、writel。
driver.c
#include 测试程序
test.c
#include 更多嵌入式资料,请关注公众号: 一口Linux。