stm32使用HAL库快速编写智能寻迹避障小车(附代码)
最近学校安排了一节用stm32编写寻迹避障小车的课,但无奈学校老师教的方法让作者觉得无法理解,但课程答辩时间快到了,组内小组成员又做的磕磕绊绊,于是身为组长的我就决定尝试一下用刚学的cubemx工具,完整的写完一个小车寻迹避障代码。经过长达三天的编写搭车过程,作者终于做出了一个可以稳定寻迹的小车,过程虽然非常艰辛,但是也非常有趣。好了废话不多说,下面是具体思路。
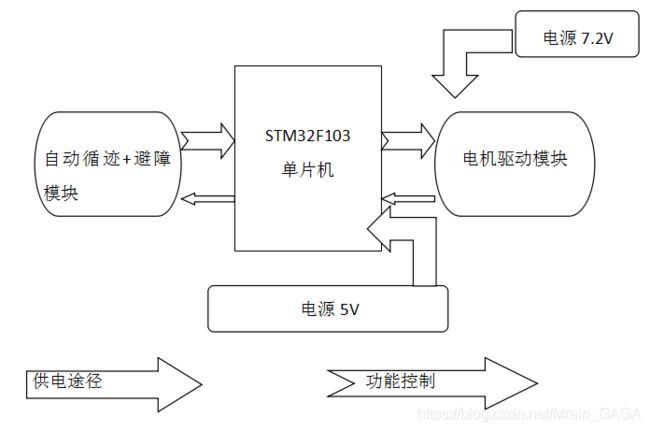
本设计主要有三个模块,包括信号检测模块、主控模块、电机驱动模块。信号检测模块采用灰度传感器和超声波,用以对有无障碍与黑线进行检测。主控电路采用STM32单片机为控制芯片。用编码器cubemx等软件进行编程控制,电机驱动模块采用意法半导体的298N专用电机驱动芯片,单片控制与传统分立元件电路相比,使整个系统有很好的稳定性。信号检测模块将采集到的路况信号传入STM32单片机,经单片机处理过后对298N发出指令进行相应的调整。通过有无光线接收来控制电动小车的转向,从而实现自动循迹避障的功能。
需要的材料:
- 电机2个和万向轮2个(也可以用4个电机)
- 小车底板
- 298n一个
- stm32
- 电池
- 灰度传感器3个
- 超声波传感器1个
- 杜邦线若干
小车整体连接思路如下,
主要元件介绍:
1. 超声波
超声波测距器可应用于汽车倒车。建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度、物体厚度等的测量。其测量范围为0.10~4.00m,测量精度为1cm。测量时与被测物体无直接接触,能够清晰、稳定地显示测量结果。
由于超声波指向性强,能量消耗慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。利用超声波检测距离设计比较方便,计算处理也比较简单,并且在测量精度方面也能达到使用的要求。
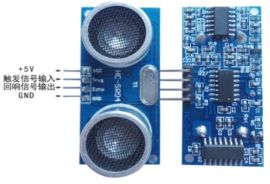
VCC 供 3.3V-5 V电源,
GND 为地线,
TRIG 触发控制信号输入,
ECHO 回响信号输出
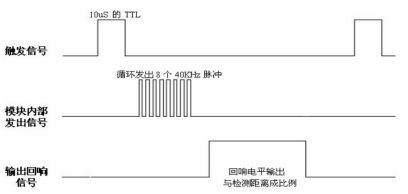
基本工作原理:
(1)采用 IO 口 TRIG 触发测距,给最少 10us 的高电平信号。
(2)模块自动发送 8 个 40khz 的方波,自动检测是否有信号返回;
(3)有信号返回,通过 IO 口 ECHO 输出一个高电平,高电平持续的时间就是超声波从发射到返回的时间。测试距离=(高电平时间*声速(340M/S))/2;
2. 灰度传感器
灰度传感器是模拟传感器,与stm32结合使用,可以感知地面或桌面不同的颜色而产生相应的信号,可实现与颜色有相关的互动作品,也可以作为巡线小车的巡线传感器或者足球机器人的场地灰度识别。电源需要和控制器一致,通常为3.3V或5V。
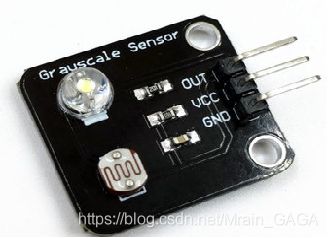
接口定义:
out:信号输出
+:电源(VCC)
-:地(GND)
基本工作原理:
灰度传感器共引出三个引脚,分别是电源正Vcc、电源地GND、信号端out,实际使用时可以直接将传感器连接到stm32的模拟接口,传感器白色高亮 LED 亮起,将传感器扣放在灰度不同的纸张上,通过stm32自带的 AD 转换进行数据的读取,然后通过串口打印出测量的模拟量即可。
3. 电机
电机采用直流减速电机,直流减速电机转动力矩大,体积小,重量轻,装配简单,使用方便。由于其内部由高速电动机提供原始动力,带动变速(减速)齿轮组,可以产生较大扭力。

4. 298n驱动模块
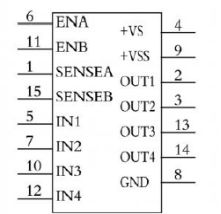
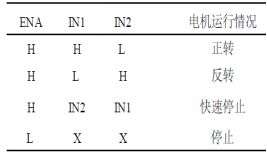
驱动模块采用专用芯片L298N 作为电机驱动芯片,L298N 是一个具有高电压大电流的全桥驱动芯片,其响应频率高,一片L298N可以分别控制两个直流电机。以下为L298N的引脚图和输入输出关系表。
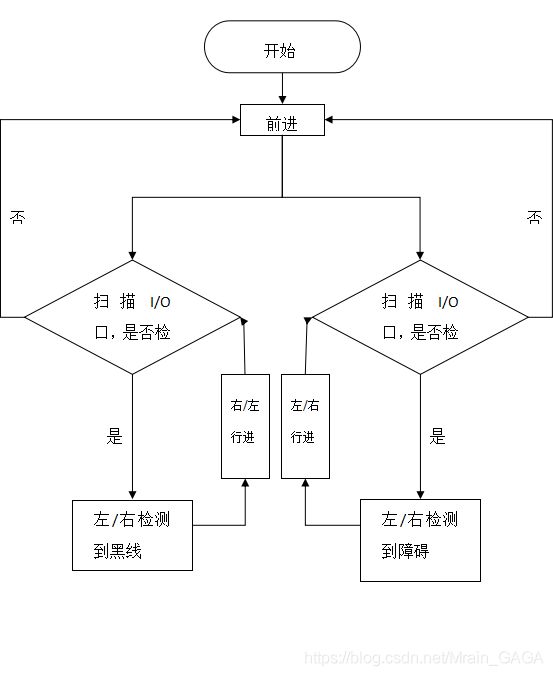
总体控制思路
主要代码:
1. 距离测算代码
uint16_t soner_gettime(void)
{
uint32_t a;
a=TIM2->CNT;
return a;
}
float soner_getdistance(void)
{
uint16_t time_node1;
uint16_t time_node2;
uint16_t measure;
soner_startrange();
while(HAL_GPIO_ReadPin(SONER_PORT,SONER_ECHO_PIN)==RESET);
time_node1=soner_gettime();
while(HAL_GPIO_ReadPin(SONER_PORT,SONER_ECHO_PIN)==SET);
time_node2=soner_gettime();
measure=time_node2-time_node1;
distance_temp = measure * 17.0/100;
if(distance_last==0)
distance_last = distance_temp;
if(distance_last-distance_temp>100 || distance_temp-distance_last>100)
{
distance_result =distance_last;
distance_last=distance_temp;
}
else
{
distance_result=distance_temp;
distance_last=distance_temp;
}
return distance_result;
}
2. 距离判断
if(distance<15){
HAL_GPIO_WritePin(ele_l1_GPIO_Port, ele_l1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_l2_GPIO_Port, ele_l2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_r1_GPIO_Port, ele_r1_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_r2_GPIO_Port, ele_r2_Pin, GPIO_PIN_SET);
}
3. ADC读取灰度传感器值:
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc1),HAL_ADC_STATE_REG_EOC))
{
ADC1_Value = HAL_ADC_GetValue(&hadc1);
lemon1=(ADC1_Value-3000);
if(lemon1<100){
a1=1;
}else{
a1=0;
}
}
//adc1
HAL_ADC_PollForConversion(&hadc2,50);
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc2),HAL_ADC_STATE_REG_EOC))
{
ADC2_Value = HAL_ADC_GetValue(&hadc2);
lemon2=(ADC2_Value-3300);
if(lemon2<40){
a2=1;
}else{
a2=0;
}
}
//adc2
HAL_ADC_PollForConversion(&hadc3,50);
if(HAL_IS_BIT_SET(HAL_ADC_GetState(&hadc3),HAL_ADC_STATE_REG_EOC))
{
ADC3_Value = HAL_ADC_GetValue(&hadc3);
lemon3=(ADC3_Value-2180);
if(lemon3<120){
a3=1;
}else{
a3=0;
}
//adc3
}
4. 灰度传感器驱动电机:
if(a2==1&&distance>15){
HAL_GPIO_WritePin(ele_l1_GPIO_Port, ele_l1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_l2_GPIO_Port, ele_l2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_r1_GPIO_Port, ele_r1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_r2_GPIO_Port, ele_r2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3,25);
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,25);
}
if(a1==1&&distance>15){
HAL_GPIO_WritePin(ele_l1_GPIO_Port, ele_l1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_l2_GPIO_Port, ele_l2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_r1_GPIO_Port, ele_r1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_r2_GPIO_Port, ele_r2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3,25);
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,0);
}
if(a3==1&&distance>15){
HAL_GPIO_WritePin(ele_l1_GPIO_Port, ele_l1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_l2_GPIO_Port, ele_l2_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(ele_r1_GPIO_Port, ele_r1_Pin, GPIO_PIN_RESET);
HAL_GPIO_WritePin(ele_r2_GPIO_Port, ele_r2_Pin, GPIO_PIN_SET);
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_3,0);
__HAL_TIM_SET_COMPARE(&htim4,TIM_CHANNEL_1,25);
}
制作过程
小车的组装还比较简单,组装小车并没有花太长时间。我们用3D打印做了一个放灰度传感器的小架子。
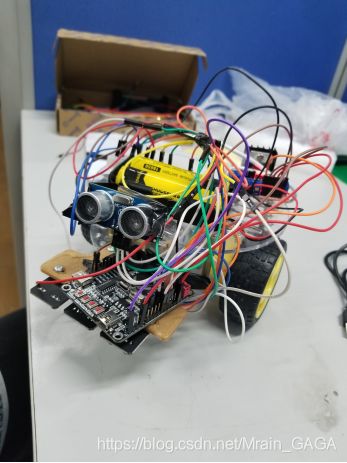
因为采用了cubemx编写程序,使得代码简洁易懂。
经过多次测试与改进,作者的智能小车能很好的完成循迹和避障功能,小车能够用灰度传感器在测试场地上沿黑线前进并在转弯处转向。通过本次编程,作者理解了智能小车避障、寻迹与自动控制的基本原理,并且学习了使用cubemx编写stm32的keil代码,十分有趣,让我明白了电控的知识与过程,慢慢领悟了其重要性,在我们的生活中也可以用到,比如可自己制作自动扫地机器人,无人机等,激发了我学习的动力,也让我接触到了电机控制、灰度传感器、298n模块、超声波模块的使用,并学习了如何烧录芯片、编写代码以及串口调试。