Linux进程通信 之 信号灯(semphore)
一. 信号灯简介
信号灯与其他进程间通信方式不大相同,它主要提供对进程间共享资源访问控制机制。
相当于内存中的标志,进程可以根据它判定是否能够访问某些共享资源,同时,进程
也可以修改该标志。除了用于访问控制外,还可用于进程同步。
信号灯有以下两种类型:
二值信号灯:最简单的信号灯形式,信号灯的值只能取0或1,类似于互斥锁。
注:二值信号灯能够实现互斥锁的功能,但两者的关注内容不同。信号灯强调共享资源,
只要共享资源可用,其他进程同样可以修改信号灯的值;互斥锁更强调进程,占用资源
的进程使用完资源后,必须由进程本身来解锁。
计算信号灯:信号灯的值可以取任意非负值(当然受内核本身的约束)。
系统V信号灯是随内核持续的,只有在内核重起或者显示删除一个信号灯集时,该信号
灯集才会真正被删除。
二. 信号灯的基本操作
对信号灯的操作无非有下面三种类型:
1、打开或创建信号灯
2、信号灯值操作
linux可以增加或减小信号灯的值,相应于对共享资源的释放和占有。具体参见后面的
semop系统调用。
3、获得或设置信号灯属性:
系统中的每一个信号灯集都对应一个struct sem_array结构,该结构记录了信号灯集
的各种信息,存在于系统空间。为了设置、获得该信号灯集的各种信息及属性,在用户
空间有一个重要的联合结构与之对应,即union semun。

三、系统V信号灯API
系统V消息队列API只有三个,使用时需要包括几个头文件:
#include
#include
#include
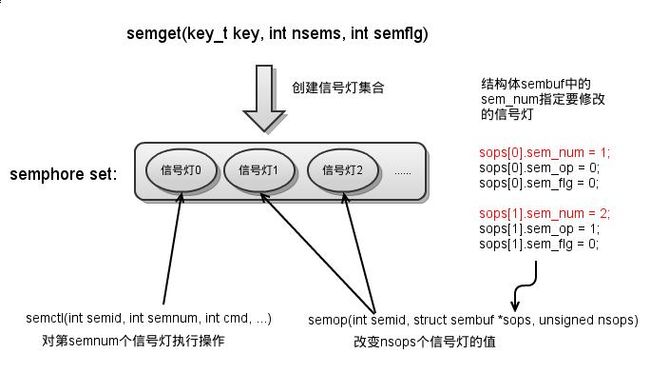
1)int semget(key_t key, int nsems, int semflg)
参数key是一个键值,由ftok获得,唯一标识一个信号灯集.
参数nsems指定信号灯集包含信号灯的数目;
semflg参数是一些标志位。
该调用返回与健值key相对应的信号灯集id
调用返回:成功返回信号灯集描述字,否则返回-1。
2)int semop(int semid, struct sembuf *sops, unsigned nsops);
semid是信号灯集ID,sops数组的每一个sembuf结构都刻画一个在特定信号灯上的操作。
nsops为sops数组的大小。 sembuf结构如下:
struct sembuf {
unsigned short sem_num; /* semaphore index in array */
short sem_op; /* semaphore operation */
short sem_flg; /* operation flags */
};
sem_num对应集合中的信号灯,0对应第一个信号灯, 以此类推...
sem_flg可取IPC_NOWAIT以及SEM_UNDO两个标志。如果设置了SEM_UNDO标志,
那么在进程结束时,相应的操作将被取消,这是比较重要的一个标志位。如果设置了该标
志位,那么在进程没有释放共享资源就退出时,内核将代为释放。如果为一个信号灯设置
了该标志,内核都要分配一个sem_undo结构来记录它,为的是确保以后资源能够安全释
放。事实上,如果进程退出了,那么它所占用就释放了,但信号灯值却没有改变,此时,
信号灯值反映的已经不是资源占有的实际情况,在这种情况下,问题的解决就靠内核来完
成。这有点像僵尸进程,进程虽然退出了,资源也都释放了,但内核进程表中仍然有它的
记录,此时就需要父进程调用waitpid来解决问题了。
sem_op的值大于0,等于0以及小于0确定了对sem_num指定的信号灯进行的三种操作。
这里需要强调的是semop可以同时操作多个信号灯,在实际应用中,对应多种资源的申请
或释放。semop保证操作的原子性,这一点尤为重要。尤其对于多种资源的申请来说,要
么一次性获得所有资源,要么放弃申请,要么在不占有任何资源情况下继续等待,这样,
一方面避免了资源的浪费;另一方面,避免了进程之间由于申请共享资源造成死锁。
也许从实际含义上更好理解这些操作:信号灯的当前值记录相应资源目前可用数目;sem_op>0对应相应进程要释放sem_op数目的共享资源;sem_op=0可以用于对共享资
源是否已用完的测试;sem_op<0相当于进程要申请-sem_op个共享资源。再联想操作的
原子性,更不难理解该系统调用何时正常返回,何时睡眠等待。
调用返回:成功返回0,否则返回-1。
3) int semctl(int semid,int semnum,int cmd,union semun arg)
该系统调用实现对信号灯的各种控制操作,参数semid指定信号灯集,参数cmd指定具体的
操作类型;参数semnum指定对哪个信号灯操作,只对几个特殊的cmd操作有意义;arg用
于设置或返回信号灯信息。
该系统调用详细信息请参见其手册页,这里只给出参数cmd所能指定的操作。
IPC_STAT 获取信号灯信息,信息由arg.buf返回;
IPC_SET 设置信号灯信息,待设置信息保存在arg.buf中.
GETALL 返回所有信号灯的值,结果保存在arg.array中,参数sennum被忽略;
GETNCNT 返回等待semnum所代表信号灯的值增加的进程数,相当于目前有多少
进程在等待semnum代表的信号灯所代表的共享资源;
GETPID 返回最后一个对semnum所代表信号灯执行semop操作的进程ID;
GETVAL 返回semnum所代表信号灯的值;
GETZCNT 返回等待semnum所代表信号灯的值变成0的进程数;
SETALL 通过arg.array更新所有信号灯的值;同时,更新与本信号集相关的
semid_ds结构的sem_ctime成员;
SETVAL 设置semnum所代表信号灯的值为arg.val;
调用返回:调用失败返回-1,成功返回与cmd相关:
Cmd return value
GETNCNT Semncnt
GETPID Sempid
GETVAL Semval
GETZCNT Semzcnt
semctl函数使用到的结构体:
union semun {
int val; /* value for SETVAL */
struct semid_ds *buf; /* buffer for IPC_STAT & IPC_SET */
unsigned short *array; /* array for GETALL & SETALL */
struct seminfo *__buf; /* buffer for IPC_INFO */ //test!!
void *__pad;
};
struct seminfo {
int semmap;
int semmni;
int semmns;
int semmnu;
int semmsl;
int semopm;
int semume;
int semusz;
int semvmx;
int semaem;
};
四、范例
这个范例使用信号灯来同步共享内存的操作, 程序创建一块共享内存, 然后父子进程共同
修改共享内存. 父子进程采用信号灯来同步操作.
#include#include #include #include #define SHM_KEY 0x33 #define SEM_KEY 0x44 union semun { int val; struct semid_ds *buf; unsigned short *array; }; int P(int semid) { struct sembuf sb; sb.sem_num = 0; sb.sem_op = -1; sb.sem_flg = SEM_UNDO; if(semop(semid, &sb, 1) == -1) { perror("semop"); return -1; } return 0; } int V(int semid) { struct sembuf sb; sb.sem_num = 0; sb.sem_op = 1; sb.sem_flg = SEM_UNDO; if(semop(semid, &sb, 1) == -1) { perror("semop"); return -1; } return 0; } int main(int argc, char **argv) { pid_t pid; int i, shmid, semid; int *ptr; union semun semopts; /* 创建一块共享内存, 存一个int变量 */ if ((shmid = shmget(SHM_KEY, sizeof(int), IPC_CREAT | 0600)) == -1) { perror("msgget"); } /* 将共享内存映射到进程, fork后子进程可以继承映射 */ if ((ptr = (int *)shmat(shmid, NULL, 0)) == (void *)-1) { perror("shmat"); } *ptr = 0; /* 创建一个信号量用来同步共享内存的操作 */ if ((semid = semget(SEM_KEY, 1, IPC_CREAT | 0600)) == -1) { perror("semget"); } /* 初始化信号量 */ semopts.val = 1; if (semctl(semid, 0, SETVAL, semopts) < 0) { perror("semctl"); } if ((pid = fork()) < 0) { perror("fork"); } else if (pid == 0) { /* Child */ /* 子进程对共享内存加1 */ for (i = 0; i < 100000; i++) { P(semid); (*ptr)++; V(semid); printf("child: %d\n", *ptr); } } else { /* Parent */ /* 父进程对共享内存减1 */ for (i = 0; i < 100000; i++) { P(semid); (*ptr)--; V(semid); printf("parent: %d\n", *ptr); } waitpid(pid); /* 如果同步成功, 共享内存的值为0 */ printf("finally: %d\n", *ptr); } return 0; }
| Systm V | POSIX |
| semctl() | sem_getvalue() |
| semget() | sem_post() |
| semop() | sem_timedwait() |
| sem_trywait() | |
| sem_wait() | |
| sem_destroy() | |
| sem_init() | |
| sem_close() | |
| sem_open() | |
| sem_unlink() |
另外一个区别是,对于POSIX信号量,你可以有命名的信号量,例如,信号量有一个文件
Posix的无名信号量一般用于线程同步, 无名信号量是进程持续的, 无名信号量的api为
sem_init
sem_destroy
下面一个范例使用Posix的有名信号量来同步父子进程的共享内存操作:
#include#include #include #include #include /* For O_* constants */ #include /* For mode constants */ #include #define SHM_KEY 0x33 int main(int argc, char **argv) { pid_t pid; int i, shmid; int *ptr; sem_t *sem; /* 创建一块共享内存, 存一个int变量 */ if ((shmid = shmget(SHM_KEY, sizeof(int), IPC_CREAT | 0600)) == -1) { perror("msgget"); } /* 将共享内存映射到进程, fork后子进程可以继承映射 */ if ((ptr = (int *)shmat(shmid, NULL, 0)) == (void *)-1) { perror("shmat"); } *ptr = 0; /* posix的有名信号量是kernel persistent的 * 调用sem_unlink删除以前的信号量 */ sem_unlink("/mysem"); /* 创建新的信号量, 初值为1, sem_open会创建共享内存 * 所以信号量是内核持续的 */ if ((sem = sem_open("/mysem", O_CREAT, 0600, 1)) == SEM_FAILED) { perror("sem_open"); } if ((pid = fork()) < 0) { perror("fork"); } else if (pid == 0) { /* Child */ /* 子进程对共享内存加1 */ for (i = 0; i < 100000; i++) { sem_wait(sem); (*ptr)++; sem_post(sem); printf("child: %d\n", *ptr); } } else { /* Parent */ /* 父进程对共享内存减1 */ for (i = 0; i < 100000; i++) { sem_wait(sem); (*ptr)--; sem_post(sem); printf("parent: %d\n", *ptr); } waitpid(pid); /* 如果同步成功, 共享内存的值为0 */ printf("finally: %d\n", *ptr); sem_unlink("/mysem"); } return 0; }