Partial differential equations and the finite element method 3-FEA1.md
This part is devoted to introduce the Galerkin method and its important special case, the Finite element method.
Consider the general framework
Let V V be a Hilbert space, a(.,.):V×V→R a ( . , . ) : V × V → R a bilinear form and l∈V′ l ∈ V ′ . It is our task to find u∈V u ∈ V such that
(1)
We assume that the bilinear form a(.,.) a ( . , . ) is bounded and V-elliptic, i.e., that there exist constants Cb,Cel>0 C b , C e l > 0 such that
and
Recall that the weak problem (1) has a unique solution by the Lax-Milgram lemma.
The Galerkin method
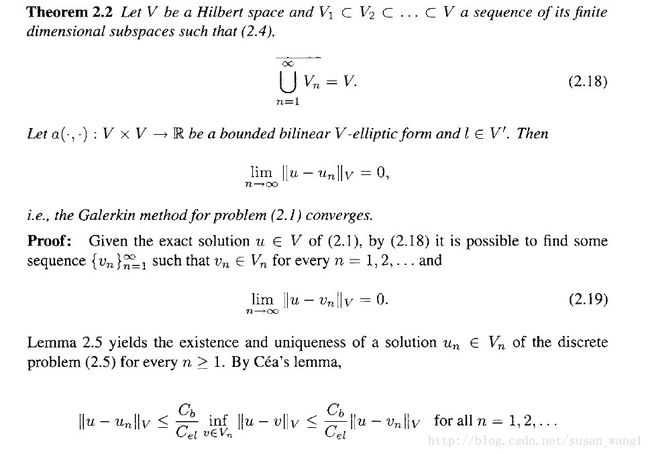
As V V is infinite dim function space. The Galerkin method is based on a sequence of finite dimensional subspaces {Vn}∞n=1⊂V { V n } n = 1 ∞ ⊂ V , Vn⊂Vn+1 V n ⊂ V n + 1 , that fill the space V V in the limit. In each finite-dimensional space Vn V n , problem (1) is solved exactly. It can be shown that under suitable assumptions the sequence of the approximate solutions {un}∞n=1 { u n } n = 1 ∞ converges to the exact solution of problem (1).
Discrete problem
Find un∈Vn u n ∈ V n such that
(2)
Lemma 1 (Unique solvability) Problem (2) has a unique solution un∈Vn u n ∈ V n ,.
Proof: Recall Lax-Milgram lemma : Let V V be a Hilbert space, a(.,.):V×V→R a ( . , . ) : V × V → R a bounded V-elliptic bilinear form and l∈V′ l ∈ V ′ Then there exists a unique solution to the problem
Suppose space V V has a finite basis {vn}Nnn=1 { v n } n = 1 N n , then
where yj y j s are unknown coefficients.
Denote Sn={a(vj,vi)}Ni,j=1 S n = { a ( v j , v i ) } i , j = 1 N , Fn={l(vi)} F n = { l ( v i ) } , Yn={yj} Y n = { y j } , then
(3)
Lemma 2 (Positive definiteness of Sn S n ) Let Vn V n be a Hilbert space and a(.,.):V×V→R a ( . , . ) : V × V → R a bilinear V-elliptic form. Then the stiffness matrix Sn S n , of the discrete problem (3) is positive definite.
About the error u−un u − u n
Lemma 3 (Orthogonality of error for elliptic problems) Let u∈V u ∈ V be the exact solution of the continuous problem (I ) and un u n the exact solution of the discrete problem (3).
Then the error en=u−un e n = u − u n , satisjies
Proof:Because Vn⊂V V n ⊂ V , then
Remark 1 (Geometrical interpretation) If the bilinear form a(.,.) a ( . , . ) is symmetric, it induces an energetic inner product, then
i.e., that the error of the Galerkin approximation en=u−un e n = u − u n is orthogonal to the Galerkin subspace Vn V n in the energetic inner product. Hence the approximate solution u, E V, is an orthogonal projection of the exact solution u u onto the Galerkin subspace Vn V n in the energetic inner product, and thus it is the nearest element in the space Vn V n to the exact solution u u in the energy norm,
FEA
Let Ω⊂Rd Ω ⊂ R d , where d d is the spatial dimension, be an open bounded set. If the Hilbert space V V consists of functions defined in Ω Ω and the Galerkin subspaces Vn V n comprise piecewise-polynomial functions, the Galerkin method is called the Finite element method (FEM).
Consider the model equation
where f∈L2(Ω) f ∈ L 2 ( Ω ) , in a bounded interval Ω=(a,b)⊂R Ω = ( a , b ) ⊂ R , equipped with the homogeneous Dirichlet boundary conditions. At the beginning let a1 a 1 and a0 a 0 be constants and assume a simple load function of the form f(x)=1 f ( x ) = 1 .
The Galerkin procedure assumes a sequence of finite-dimensional subspaces
Consider a partition
and define the finite element mesh
The open intervals
is said to be the mesh diameter.
The piecewise linear basis functions vj v j , satisfy vj(xi)=δij v j ( x i ) = δ i j .
Then by (3), we can get un u n .