openCV cvHoughLines2 函数源码解析(CV_HOUGH_PROBABILISTIC 基于概率的霍夫变换)
霍夫变换:
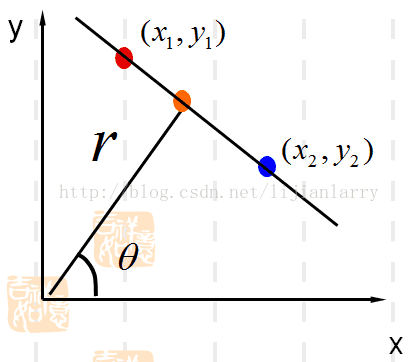
为了能够正确识别和检测任意方向的和任意位置的直线,使用Duda和Hart提出的直线极坐标方程:
![]()
这就是霍夫变换的公式。
openCV 的基于概率的算法是根据“Robust Detection of Lines Using the Progressive Probabilistic Hough Transform”写的,我们看一下算法源码:
/*
Image
输入图像
rho
与象素相关单位的距离精度
theta
弧度测量的角度精度
threshold
阈值参数。如果相应的累计值大于 threshold, 则函数返回的这个线段
lineLength
它是最小线段长度
lineGap
表示在同一条直线上进行碎线段连接的最大间隔值
lines
保存直线两端的坐标
linesMax
直线的个数阈值(常数 INT_MAX)
*/
static void
icvHoughLinesProbabalistic( CvMat* image,
float rho, float theta, int threshold,
int lineLength, int lineGap,
CvSeq *lines, int linesMax )
{
CvMat* accum = 0;//累加器
CvMat* mask = 0;//保存0,1图像
CvMat* trigtab = 0;//保存cos、sin与距离精度(irho)的乘积
CvMemStorage* storage = 0;
CV_FUNCNAME( "icvHoughLinesProbalistic" );
__BEGIN__;
CvSeq* seq;
CvSeqWriter writer;
int width, height;
int numangle, numrho;
float ang;
int r, n, count;
CvPoint pt;
float irho = 1 / rho;
CvRNG rng = cvRNG(-1);//产生随机数
const float* ttab;
uchar* mdata0;
CV_ASSERT( CV_IS_MAT(image) && CV_MAT_TYPE(image->type) == CV_8UC1 );
width = image->cols;
height = image->rows;
numangle = cvRound(CV_PI / theta);
numrho = cvRound(((width + height) * 2 + 1) / rho);
CV_CALL( accum = cvCreateMat( numangle, numrho, CV_32SC1 ));
CV_CALL( mask = cvCreateMat( height, width, CV_8UC1 ));
CV_CALL( trigtab = cvCreateMat( 1, numangle, CV_32FC2 ));
cvZero( accum );
CV_CALL( storage = cvCreateMemStorage(0) );
for( ang = 0, n = 0; n < numangle; ang += theta, n++ )
{
trigtab->data.fl[n*2] = (float)(cos(ang) * irho);
trigtab->data.fl[n*2+1] = (float)(sin(ang) * irho);
}
ttab = trigtab->data.fl;
mdata0 = mask->data.ptr;
CV_CALL( cvStartWriteSeq( CV_32SC2, sizeof(CvSeq), sizeof(CvPoint), storage, &writer ));
//第一步生成0,1图像,即:选择非零的点
// stage 1. collect non-zero image points
//count = 0 在这里毫无意义
for( pt.y = 0, count = 0; pt.y < height; pt.y++ )
{
const uchar* data = image->data.ptr + pt.y*image->step;
uchar* mdata = mdata0 + pt.y*width;
for( pt.x = 0; pt.x < width; pt.x++ )
{
if( data[pt.x] )
{
mdata[pt.x] = (uchar)1;
CV_WRITE_SEQ_ELEM( pt, writer );//存入链表
}
else
mdata[pt.x] = 0;
}
}
seq = cvEndWriteSeq( &writer );
count = seq->total;
//随机处理
// stage 2. process all the points in random order
for( ; count > 0; count-- )
{
// choose random point out of the remaining ones
int idx = cvRandInt(&rng) % count;//生成随机数
int max_val = threshold-1, max_n = 0;
CvPoint* pt = (CvPoint*)cvGetSeqElem( seq, idx );
CvPoint line_end[2] = {{0,0}, {0,0}};
float a, b;
int* adata = accum->data.i;
int i, j, k, x0, y0, dx0, dy0, xflag;
int good_line;
const int shift = 16;
i = pt->y;
j = pt->x;
//注意这行代码是为了覆盖pt指向的内容,也就是说pt指向的链表seq的内容被count-1位置上的内容覆盖了
// "remove" it by overriding it with the last element
*pt = *(CvPoint*)cvGetSeqElem( seq, count-1 );
// check if it has been excluded already (i.e. belongs to some other line)
if( !mdata0[i*width + j] )
continue;
//更新 累加器,查找最大概率的线
// update accumulator, find the most probable line
for( n = 0; n < numangle; n++, adata += numrho )
{
r = cvRound( j * ttab[n*2] + i * ttab[n*2+1] );
r += (numrho - 1) / 2;//这行程序没有意义
int val = ++adata[r];
if( max_val < val )
{
max_val = val;
max_n = n;
}
}
//如果点的个数max_val < threshold 就被认为是不符合条件的候选点(i,j)
// if it is too "weak" candidate, continue with another point
if( max_val < threshold )
continue;
//如果点的个数max_val >= threshold 就被认为是符合条件的候选点(i,j)
// from the current point walk in each direction
// along the found line and extract the line segment
//极坐标中的方向角是直线的垂线与极轴正向的夹角,在图像中夹角是第四象限的角
//(极轴正向逆时针旋转,极轴就是在平面直角坐标系中的x轴正方向,对于图像来说,y轴正向是向下的)
//所以sin取负值,cos不变
a = -ttab[max_n*2+1];
b = ttab[max_n*2];
x0 = j;
y0 = i;
//计算步长dx0,dy0
if( fabs(a) > fabs(b) )
{
xflag = 1;
dx0 = a > 0 ? 1 : -1;
dy0 = cvRound( b*(1 << shift)/fabs(a) );
y0 = (y0 << shift) + (1 << (shift-1));
//1 << shift这是为了把浮点数计算转化为整数计算
}
else
{
xflag = 0;
dy0 = b > 0 ? 1 : -1;
dx0 = cvRound( a*(1 << shift)/fabs(b) );
x0 = (x0 << shift) + (1 << (shift-1));
}
//当点的位置和cos、sin确定后,每条直线都有两个方向
for( k = 0; k < 2; k++ )
{
int gap = 0, x = x0, y = y0, dx = dx0, dy = dy0;
if( k > 0 ) //控制两个方向(正好相反)
dx = -dx, dy = -dy;
// walk along the line using fixed-point arithmetics,
// stop at the image border or in case of too big gap
for( ;; x += dx, y += dy )
{
uchar* mdata;
int i1, j1;
if( xflag )
{
j1 = x;
i1 = y >> shift;
}
else
{
j1 = x >> shift;
i1 = y;
}
if( j1 < 0 || j1 >= width || i1 < 0 || i1 >= height )
break;
mdata = mdata0 + i1*width + j1;
// for each non-zero point:
// update line end,
// clear the mask element
// reset the gap
if( *mdata )
{
gap = 0;
line_end[k].y = i1;
line_end[k].x = j1;
}
else if( ++gap > lineGap )//像素间隙大于lineGap 则退出
break;
}
}
//分别计算X、Y方向距离
good_line = abs(line_end[1].x - line_end[0].x) >= lineLength ||
abs(line_end[1].y - line_end[0].y) >= lineLength;
for( k = 0; k < 2; k++ )
{
int x = x0, y = y0, dx = dx0, dy = dy0;
if( k > 0 )
dx = -dx, dy = -dy;
// walk along the line using fixed-point arithmetics,
// stop at the image border or in case of too big gap
for( ;; x += dx, y += dy )
{
uchar* mdata;
int i1, j1;
if( xflag )
{
j1 = x;
i1 = y >> shift;
}
else
{
j1 = x >> shift;
i1 = y;
}
mdata = mdata0 + i1*width + j1;
// for each non-zero point:
// update line end,
// clear the mask element
// reset the gap
//如果*mdata == 1则设置为0,去除已经检测过的点
if( *mdata )
{
//如果是直线,则去除累加器里面的值
if( good_line )
{
adata = accum->data.i;
for( n = 0; n < numangle; n++, adata += numrho )
{
r = cvRound( j1 * ttab[n*2] + i1 * ttab[n*2+1] );
r += (numrho - 1) / 2;//这行程序没有意义
adata[r]--;
}
}
*mdata = 0;
}
if( i1 == line_end[k].y && j1 == line_end[k].x )
break;
}
}
if( good_line )
{
//哎,openCV 也有这样的乱用情况
CvRect lr = { line_end[0].x, line_end[0].y, line_end[1].x, line_end[1].y };
cvSeqPush( lines, &lr );
if( lines->total >= linesMax )
EXIT;
}
}
__END__;
cvReleaseMat( &accum );
cvReleaseMat( &mask );
cvReleaseMat( &trigtab );
cvReleaseMemStorage( &storage );
}问题:
1)for( pt.y = 0, count = 0; pt.y < height; pt.y++ )// count = 0;毫无意义可言,为什么加这个代码?
2)r += (numrho - 1) / 2;//感觉这句话也是多余,去掉之后,效果完全一样
3)CvRect lr = { line_end[0].x, line_end[0].y, line_end[1].x, line_end[1].y };//不是保存四个点吗?怎么会使用CvRect?来个数组不行吗?CvPoint points[4];
4)openCV的程序基本上是C++编译的,为什么这么说呢?是因为还有相当一部分代码是C语言风格(函数指针或大段的宏定义等等)。但是这个函数的风格有点太随便了些。所有变量定义都在函数开始处,都C++编译了,为什么还保留这种写法?比如:int r, n, count;中的变量n,完全可以拿到算法里面去临时定义
5)变量mdata0 和变量mdata的定义!是不是mdata应该在外层,mdata0应该在内层啊。
读完这个函数之后,发现程序写的如此“随便”。