分类和回归树,随机森林,霍夫森林(CART,random forests,hough forests)
1. 分类和回归树(CART,classification and regression tree)
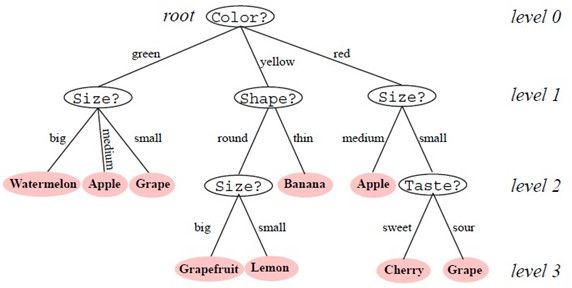
基于树的方法的思路:把特征空间划分成一系列的矩形区域,然后在每个区域中拟合一个简单的模型(例如:常量)。下图是决策树(decision tree)的一个简单示意:
下面分别介绍回归树和分类树。
1.1 回归树(regression tree)
如何逐步生成回归树?给定(输入、响应)组成的N个观测,如何自动确定分裂变量、分裂点,以及树的结构。
第一步:搜索分裂变量和分裂点。假设将空间划分为M个区域,每个区域用对响应建模。在二叉划分中,假设搜索分裂变量j和分裂点s,定义一对半平面:
搜索分裂变量j和分裂点s的目标函数为:
内部极小化可以用下式求解:
第二步:树结构的控制。涉及两个方面,一个是何时停止分裂,另一个是对树进行剪枝。
何时停止分裂有两种方法:一种是仅当分裂是平方和的降低超过某个阈值时,才分裂;另一种是仅当达到最小节点大小时停止分裂。
对树进行剪枝:思路是定义树的一些子树,从它们中找到在“对数据拟合程度 + 树模型的复杂度”准则下最优的一个,如下式:
其中:
参数来控制树的大小和对数据拟合程度之间的折中,对它的估计用5或10折交叉验证实现。
1.2 分类树(classification tree)
跟回归树相比,主要是分裂节点和修剪树的准则不同。首先定义节点m中类k的观测比例为:
分裂准则常用下面三个“误分类不纯度”、“Gini不纯度”、“熵不纯度”:
分裂时,找到使不纯度下降最快的分裂变量和分裂点。不纯度的下降落差可以直观的定义为:
剪枝时,最常用的是“误分类不纯度”准则。
另外:三个准则在2类分类时节点不纯度的函数图为:
从图中可以看出“Gini不纯度”、“熵不纯度”可微,更适合数值优化。
1.3 优缺点
树的主要优点是:直观,有可以理解的规则;计算量相对来说不大等等。
主要缺点:
(1)有较高的方差,数据较小的变化会导致完全不同的分裂。Bagging通过对许多树求平均来降低方差。
(2)预测面缺乏光滑性,这点主要影响回归的效果,改进的方法为:MARS(多元自适应回归样条)。
2. 随机森林(random forests)
随机森林是一个用随机方式建立的,包含多个决策树的分类器。其输出的类别是由各个树输出的类别的众数而定。
随机性主要体现在两个方面:(1)训练每棵树时,从全部训练样本中选取一个子集进行训练(即bootstrap取样)。用剩余的数据进行评测,评估其误差;(2)在每个节点,随机选取所有特征的一个子集,用来计算最佳分割方式。
随机森林的主要优点:(1)在大的、高维数据训练时,不容易出现过拟合而且速度较快;(2)测试时速度很快;(3)对训练数据中的噪声和错误鲁棒。
OpenCV 中提供了Random forest 的函数:CvRTrees::train,CvRTrees::predict等。
3. 霍夫森林(hough forests)
霍夫森林是随机森林和霍夫投票在计算机视觉中的应用,用在物体检测,跟踪和动作识别。主要特点是:
(1) 每个叶子节点都是一个判别性的码本,对到达这个叶子节点的patch做出一个预测:它来自前景的概率是多少?它距离物体中心有多远?
(2) 在节点分裂的时候,随机选择类别不纯度或是偏移量不纯度:
4. Bagging vs. Random forests
tong zhang老师课件中对二者的表述,言简意赅。
参考:
《模式分类》 第二版
The Elements of Statistical Learning
Wiki : Decision tree Random forest
决策树模型组合之随机森林与GBDT
Class-Specific Hough Forests for Object Detection
Random Forest and Its Applications , Liang Wang
龙星计划: 机器学习