Dijkstra算法是计算图中节点之间最短路径的经典算法,网上关于Dijkstra算法原理介绍比较多,这里不再多讲。值得一提的是,当图中节点之间的权重都为1时,Dijkstra算法就变化为一般意义上的广度优先搜索算法(Breadth-first search algorithm)。
Dijkstra算法流程如下:
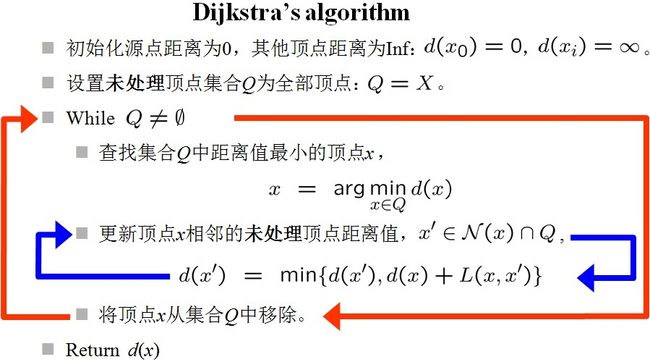
Dijkstra算法流程
在介绍Fast marching算法之前先提下Eikonal方程,Eikonal方程属于非线性偏微分方程,可以认为是一种近似波动方程,它的形式如下:
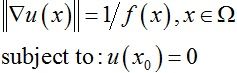
Eikonal方程解u(x)的物理含义是从源点x0以速度f(x)到达计算域Ω内x点所需要消耗的最短时间。当f(x) = 1的特殊情况下,方程解就代表计算域Ω内的距离场。
[Sethian et al. 1999]提出的Fast marching算法是一种求解Eikonal方程的数值方法。下面首先以二维正交栅格(栅格间距为h)为例,将方程左边的梯度项用一阶近似代替后可以得到:
max(U – UA, U – UB, 0)2 + max(U – UC, U – UD, 0)2 = h2/f(x)2
假设UA = min(UA, UB),UC = min(UC, UD),那么:
(U – UA)2 + (U – UC)2 = h2/f(x)2
当||UA – UC || ≤ h/f(x)时, 。
。
当||UA – UC || > h/f(x)时,U = min(UA, UC) + h/f(x)。

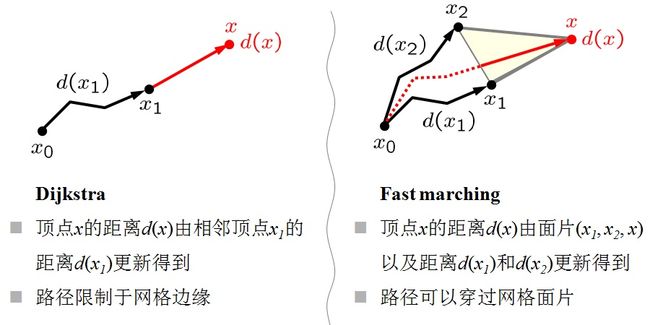
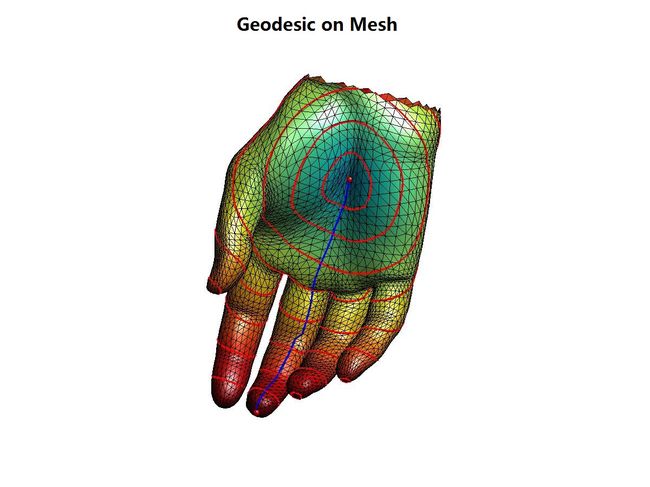
Fast marching算法也可以用于计算三角网格上的测地距离。对于三角面片x1x2x,![]() ,因此,Eikonal方程可以近似变为如下二次方程:
,因此,Eikonal方程可以近似变为如下二次方程:
(aTQa)U(x)2 + (2aTQb)U(x) + bTQb = 1/f(x)2,
其中:a = [1;1],b = –[Ux1;Ux2],M = [x – x1; x – x2],Q = (MMT) –1。通过求解上式方程可以得到x点的测地距离。
Fast marching算法流程如下:

Fast marching算法流程
Dijkstra算法和Fast marching算法思想相似,不同之处在于Dijkstra算法利用节点之间的欧式距离进行更新,而Fast marching算法利用由Eikonal方程化简得到的近似偏微分方程进行更新。
本文为原创,转载请注明出处:http://www.cnblogs.com/shushen。
参考文献:
[1] J. A. Sethian, A. Vladimirsky. Fast methods for the eikonal and related Hamilton-Jacobi equations on unstructured meshes. (1999). Proceedings of the National Academy of Sciences, 97(11), 5699-5703.