碰撞开关的两种解决方法
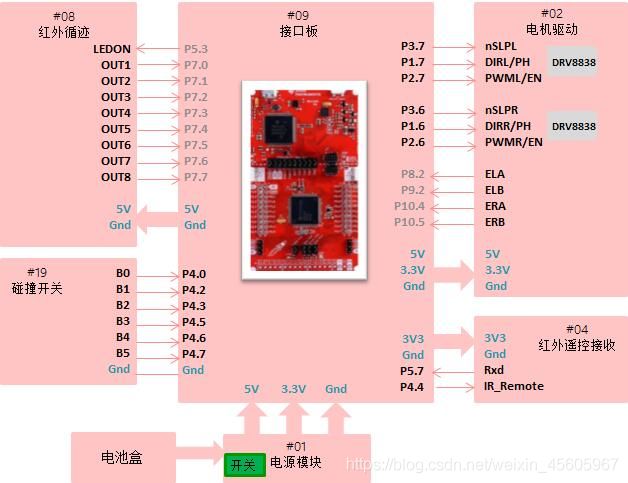
这是接口板以及相应的电路连接。
可以发现MSP432主控板外接了一个接口板,接口板与另外的模块之间有连接。包括红外循迹,电机驱动以及电源模块,碰撞开关的接入。
碰撞开关指的是在小车前端的六个可触碰开关。这里的需求是【当6个碰撞开关其中任意一个遭受撞击后,接口板上的灯开始闪烁起提示作用,但需要是不同颜色】
由于接口板和主控板已经封装好,碰撞模块又算的上外设,所以这里的输入为P4.0-P4.7中的6个接口。输出当然是LED灯
至于以不同的颜色闪烁,考虑到此主控板上LED2.0-LED2.2是不同的颜色,且可以单色三灯+任意两个三原色进行排列组合,这样就可以达到预期效果。
具体实现流程大致为:
定义输出LED → \rightarrow → 定义输入包含上拉电阻的接口 → \rightarrow → 当按下(低电平有效时)将灯点亮(即加一段延时),注意点亮灯地址的分配
需要用到的函数:
GPIO_setAsOutputPin()——将端口设置为输出
GPIO_setAsInputPinWithPullUpResistor()——将端口定义为上拉电阻输入
GPIO_INPUT_PIN_LOW()——表示GPIO接口低电平时
GPIO_getInputPinValue()——检测高低电平的函数
注意要用一个大循环给框着
具体代码如下:
/* DriverLib Includes */
#include 有些凌乱。定义引脚依旧了最前面。
现在考虑用中断相关知识来实现这个效果。因为对中断过程不了解,现找出相应的例程函数看看
/* DriverLib Includes */
#include 同样的包括引脚设置,中断请求,中断服务程序三项。
中断请求这里包括设置上拉电阻,清理中断标志位和打开中断允许端口三项
这里解释一下什么是中断标志位。一般中断程序执行有两个必要条件,一个是标志位置1,另外一个是中断允许端口打开。而中断允许端口日常打开,中断程序中也有相应的ENABLE指令,为:
MAP_GPIO_enableInterrupt(GPIO_PORT_P1, GPIO_PIN1);
具体怎么搞,根据给出的模板套应该就行了。大致分为这几个部分,且很多地方是不变的。
现在给出相应的通过中断实现的代码:
/*
* 文件说明: rslk碰撞开关的相关函数
*
* */
/* DriverLib Includes */
#include `