NanoPi M4开发opencv图像识别aruco码全过程(超详细)(一:搭环境)
NanoPi M4介绍
NanoPi M4是基于RK3399 SoC设计的一款接口尺寸与树莓派3兼容的嵌入式ARM计算机。它的尺寸只有85x56mm,接口丰富, 布局紧凑, 非常适合二次开发, 并方便嵌入到最终产品中去。
NanoPi M4板载2.4G & 5G双频WiFi蓝牙模组, 除了带有4个USB3.0 A型主口, 1个千兆以太网口, 1个HDMI 2.0 A型口, 1个3.5mm耳机输出, 和1个Type-C接口, 还带有丰富的扩展接口,包括40Pin树莓派兼容口, 双摄像头接口MIPI-CSI, PCIe x2, USB2.0, eMMC模块接口, RTC等接口

相关链接:
NanoPi M4
如何构建,安装和设置Qt 应用
Lubuntu16.04安装opencv及aruco
NanoPi M4支持运行Ubuntu Desktop 18.04 (64-bit), Lubuntu 16.04(32-bit), Ubuntu Core 18.04(64-bit), Android 7.1等多种系统,由于18.04的ubuntu系统容易出现无法解答的问题(亲身经验,深有体会),所以选用Lubuntu16.04进行编译。
同时,官方给的交叉编译工具链、使用例程以及板子背后的技术客服支持都是**非常的不到位**,在多方尝试之后,最终成功在板子上安装opencv及aruco。
0. opencv及aruco官网教程(重要参考)
https://docs.opencv.org/master/
http://www.uco.es/investiga/grupos/ava/node/26
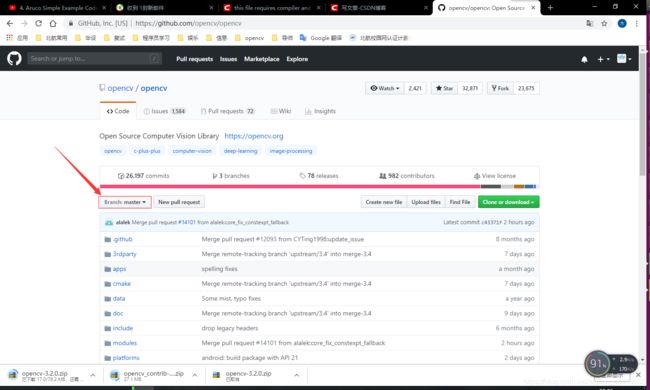
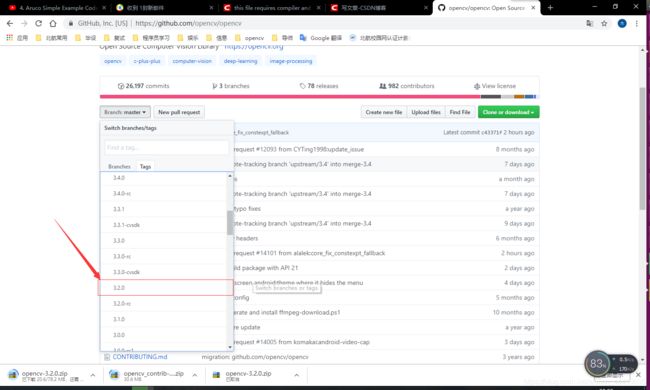
1.opencv及aruco原码下载
opencv3.2.0 + opencv_contrib 3.2.0,一定要下载对应版本的,不然会报错,官网上都有,这里给出下载链接:https://github.com/opencv
在这里插入图片描述
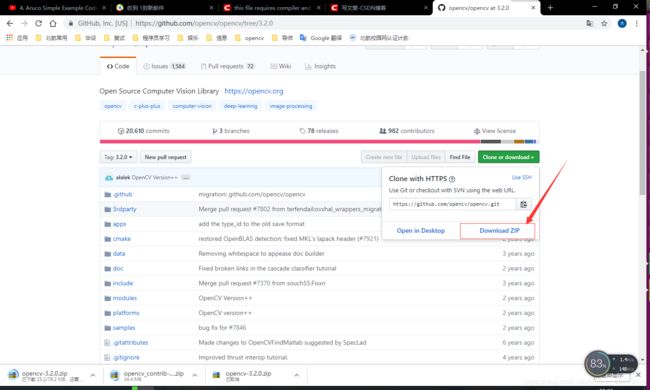

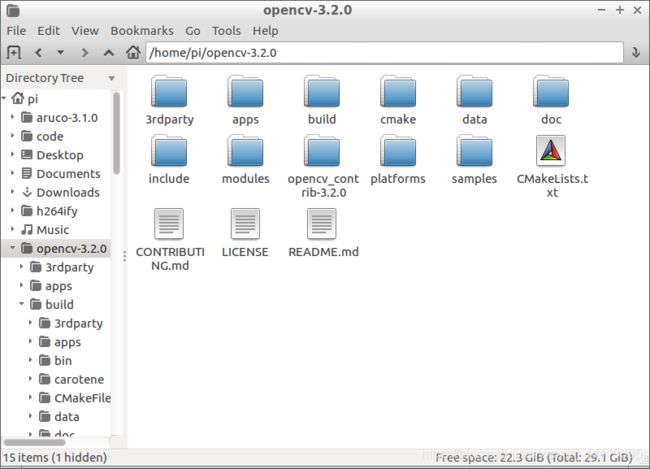
在win把opencv3.2.0及opencv_contrib 3.2.0解压,把opencv_contrib 3.2.0复制在opencv3.2.0文件夹里,用U盘复制提取到home目录下。
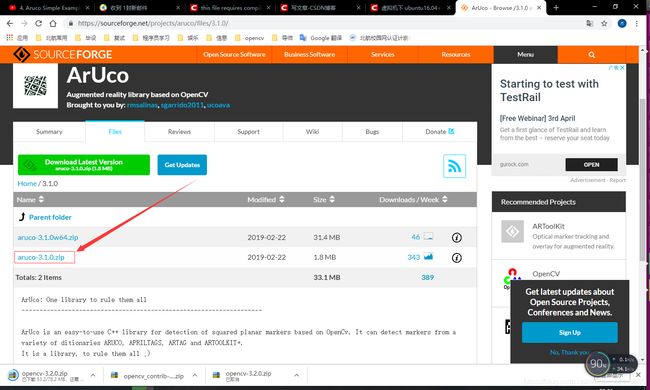
下载链接:https://sourceforge.net/projects/aruco/files/
下载aruco原码,在win把aruco解压,用U盘复制提取到home目录下。
2.安装opencv及opencv_contrib
1.进行必要的更新
sudo apt-get update
sudo apt-get upgrade
报错
pi@FriendlyELEC:~$ sudo apt-get update
sudo: unable to resolve host FriendlyELEC
[sudo] password for pi:
Reading package lists... Done
E: Could not get lock /var/lib/apt/lists/lock - open (11: Resource temporarily unavailable)
E: Unable to lock directory /var/lib/apt/lists/
解决:(自己看着来哪个不能get,rm哪个)
sudo rm /var/lib/apt/lists/lock
sudo rm /var/lib/dpkg/lock
sudo rm /var/lib/dpkg/lock-frontend
2.接下来安装依赖的库
sudo apt-get install build-essential
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
3.cmake生成makefile
3.1.将下载好的OpenCV解压到自己的目标目录中,我提取到home目录下,将opencv_contrib-3.2.0提取到opencv目录下(之前讲过),同时在该目录下新建一个文件夹build
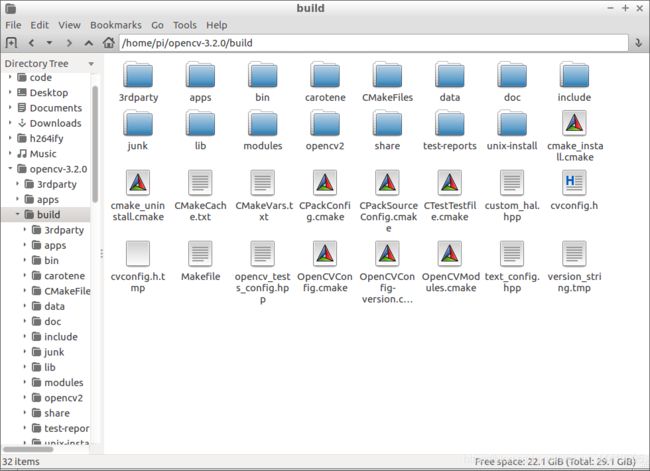
3.2.进入build目录。并且执行cmake生成makefile文件
cd opencv-3.2.0/build
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local -D OPENCV_EXTRA_MODULES_PATH=/home/pi/opencv-3.2.0/opencv_contrib-3.2.0/modules/ ..
如果不安装opencv_contrib模块,则第二步的命令为:
cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local
其中OPENCV_EXTRA_MODULES_PATH=/home/pi/opencv-3.2.0/opencv_contrib-3.2.0/modules/ …
是指opencv_contrib-3.2.0中modules所在的路径,后面的两点不可省略。
P.S.也可用cmake-gui安装,这里就不介绍了。
4.make和install
在cmake成功之后,就可以在build文件下make了。
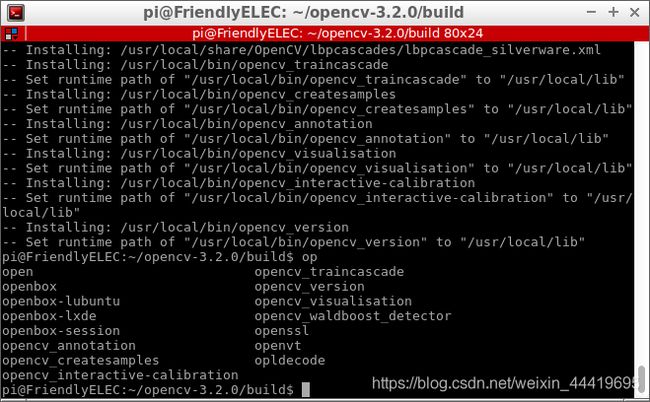
sudo make
sudo make install
安装opencv完成后,结果
3.安装aruco
下好源码后就是解压,放在home/pi界面
!](https://img-blog.csdnimg.cn/20190323145549773.png)
进入aruco目录,生cmake文件安装,代码如下
mkdir build
cd build
sudo cmake ..
sudo make
sudo make install
进入这个文件夹即代表安装完成了