HDFS NameNode HA架构分析
为什么要实现HDFS NameNode HA(High Availability)?
NameNode 保存了整个 HDFS 的元数据信息,一旦 NameNode 挂掉,整个 HDFS 就无法访问,同时 Hadoop 生态系统中依赖于 HDFS 的各个组件,包括 MapReduce、Hive、Pig 以及 HBase 等也都无法正常工作,并且重新启动 NameNode 和进行数据恢复的过程也会比较耗时。
HDFS NameNode HA(High Availability)是什么?
通过JN集群共享NameNode节点状态,通过ZKFC选举active NameNode,自动监控NameNode节点状态,自动切换。
Namenode HA 如何实现,关键技术难题是什么?
- 如何保持主和备NameNode的状态同步,并让Standby在Active挂掉后迅速提供服务,namenode启动比较耗时,包括加载fsimage和editlog(获取file to block信息),处理所有datanode第一次blockreport(获取block to datanode信息),保持NN的状态同步,需要这两部分信息同步。
- 脑裂(split-brain),指在一个高可用(HA)系统中,当联系着的两个节点断开联系时,本来为一个整体的系统,分裂为两个独立节点,这时两个节点开始争抢共享资源,结果会导致系统混乱,数据损坏。
- NameNode切换对外透明,主Namenode切换到另外一台机器时,不应该导致正在连接的客户端失败,主要包括Client,Datanode与NameNode的链接。
HDFS NameNode HA架构分析
HDFS HA 架构
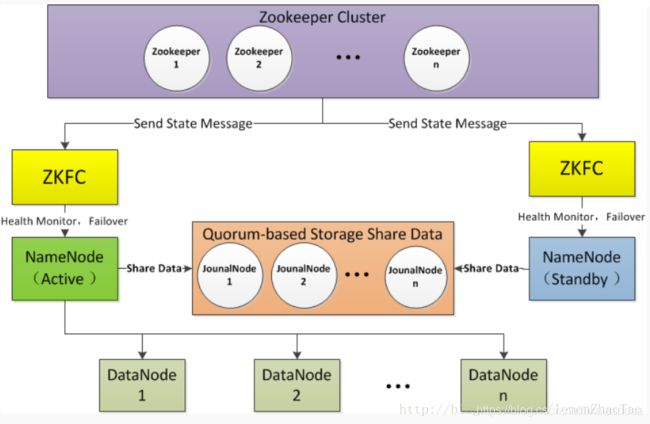
ZK:Zookeeper集群。为主备切换控制器提供主备选举支持。
ZKFC:主备切换控制器ZKFailoverController。ZKFailoverController作为独立的进程运行,对NameNode的主备切换进行总体控制(ZKFailoverController是抽象类,它的实现类是DFSZKFailoverController)。ZKFailoverController通过HealthMonitor线程能及时检测到NameNode的健康状况,在主NameNode故障时借助Zookeeper实现自动的主备选举和切换,当然NameNode目前也支持不依赖于Zookeeper的手动主备切换。
ZKFailoverController主要包括三个组件,
(1) HealthMonitor 监控NameNode是否处于unavailable或unhealthy状态。当前通过RPC调用NN相应的方法完成。
(2) ActiveStandbyElector 管理和监控自己在ZK中的状态。
(3) ZKFailoverController 它订阅HealthMonitor 和ActiveStandbyElector 的事件,并管理NameNode的状态
Active NameNode和Standby NameNode:两台NameNode形成互备,一台处于Active状态,为主NameNode,另外一台处于Standby状态,为备NameNode,只有主NameNode才能对外提供读写服务。
ZKFC和NN 是同一台机器上的两个进程。为什么要作为一个deamon进程从NN分离出来?
(1) 防止因为NN的GC失败导致心跳受影响。
(2) FailoverController功能的代码应该和应用的分离,提高的容错性。
(3) 使得主备选举成为可插拔式的插件。
共享存储系统:共享存储系统是实现NameNode的高可用最为关键的部分,共享存储系统保存了NameNode在运行过程中所产生的HDFS的元数据。只有active namenode才能往共享存储系统中写数据,active NameNode和standby NameNode通过共享存储系统实现元数据同步。在进行主备切换的时候,新的主NameNode在确认元数据完全同步之后才能继续对外提供服务。
DataNode节点:除了通过共享存储系统共享HDFS的元数据信息之外,主NameNode和备NameNode还需要共享HDFS的数据块和DataNode之间的映射关系。DataNode会同时向主NameNode和备NameNode上报数据块的位置信息,但只接收来自active namenode的读写命令。
整个架构流程:集群启动后一个NN处于active状态,并提供服务,处理客户端和datanode的请求,并把editlog写到本地和share editlog(可以是NFS,QJM等)中。另外一个NN处于Standby状态,它启动的时候加载fsimage,然后周期性的从share editlog中获取editlog,保持与active的状态同步。为了实现standby在sctive挂掉后迅速提供服务,需要DN同时向两个NN汇报,使得Stadnby保存block to datanode信息,因为NN启动中最费时的工作是处理所有datanode的blockreport。为了实现热备,增加FailoverController和ZK,FailoverController与ZK通信,通过ZK选主,FailoverController通过RPC让NN转换为active或standby。
NameNode 的主备切换实现
NameNode 主备切换主要由 ZKFailoverController、HealthMonitor 和 ActiveStandbyElector 这 3 个组件来协同实现:
ZKFailoverController 作为 NameNode 机器上一个独立的进程启动 (在 hdfs 启动脚本之中的进程名为 zkfc),启动的时候会创建 HealthMonitor 和 ActiveStandbyElector 这两个主要的内部组件,ZKFailoverController 在创建 HealthMonitor 和 ActiveStandbyElector 的同时,也会向 HealthMonitor 和 ActiveStandbyElector 注册相应的回调方法。
HealthMonitor 主要负责检测 NameNode 的健康状态,如果检测到 NameNode 的状态发生变化,会回调 ZKFailoverController 的相应方法进行自动的主备选举。
ActiveStandbyElector 主要负责完成自动的主备选举,内部封装了 Zookeeper 的处理逻辑,一旦 Zookeeper 主备选举完成,会回调 ZKFailoverController 的相应方法来进行 NameNode 的主备状态切换。
NameNode 实现主备切换的流程如图 2 所示,有以下几步:
- HealthMonitor 初始化完成之后会启动内部的线程来定时调用对应 NameNode 的 HAServiceProtocol RPC 接口的方法,对 NameNode 的健康状态进行检测。
- HealthMonitor 如果检测到 NameNode 的健康状态发生变化,会回调 ZKFailoverController 注册的相应方法进行处理。
- 如果 ZKFailoverController 判断需要进行主备切换,会首先使用 ActiveStandbyElector 来进行自动的主备选举。
- ActiveStandbyElector 与 Zookeeper 进行交互完成自动的主备选举。
- ActiveStandbyElector 在主备选举完成后,会回调 ZKFailoverController 的相应方法来通知当前的 NameNode 成为主 NameNode 或备 NameNode。
- ZKFailoverController 调用对应 NameNode 的 HAServiceProtocol RPC 接口的方法将 NameNode 转换为 Active 状态或 Standby 状态。

图2 NameNode 的主备切换实现
防止脑裂
脑裂出现的原因
Zookeeper 在工程实践的过程中经常会发生的一个现象就是 Zookeeper 客户端“假死”,所谓的“假死”是指如果 Zookeeper 客户端机器负载过高或者正在进行 JVM Full GC,那么可能会导致 Zookeeper 客户端到 Zookeeper 服务端的心跳不能正常发出,一旦这个时间持续长,超过了配置的 Zookeeper Session Timeout 参数的话,Zookeeper 服务端就会认为客户端的 session 已经过期从而将客户端的 Session 关闭。“假死”有可能引起分布式系统常说的双主或脑裂 (brain-split) 现象。具体到本文所述的 NameNode,假设 NameNode1 当前为 Active 状态,NameNode2 当前为 Standby 状态。如果某一时刻 NameNode1 对应的ZKFailoverController 进程发生了“假死”现象,那么 Zookeeper 服务端会认为 NameNode1 挂掉了,根据前面的主备切换逻辑,NameNode2 会替代 NameNode1 进入 Active 状态。但是此时 NameNode1 可能仍然处于 Active 状态正常运行,即使随后 NameNode1 对应的 ZKFailoverController 因为负载下降或者 Full GC 结束而恢复了正常,感知到自己和Zookeeper 的 Session 已经关闭,但是由于网络的延迟以及 CPU 线程调度的不确定性,仍然有可能会在接下来的一段时间窗口内 NameNode1 认为自己还是处于 Active 状态。这样 NameNode1 和 NameNode2 都处于 Active 状态,都可以对外提供服务。这种情况对于 NameNode 这类对数据一致性要求非常高的系统来说是灾难性的,数据会发生错乱且无法恢复。Zookeeper 社区对这种问题的解决方法叫做 fencing,中文翻译为隔离,也就是想办法把旧的 Active NameNode 隔离起来,使它不能正常对外提供服务。
Fencing的实现
ActiveStandbyElector 为了实现 fencing,会在成功创建 Zookeeper 节点 hadoopha/ d f s . n a m e s e r v i c e s / A c t i v e S t a n d b y E l e c t o r L o c k 从 而 成 为 A c t i v e N a m e N o d e 之 后 , 创 建 另 外 一 个 路 径 为 / h a d o o p − h a / {dfs.nameservices}/ActiveStandbyElectorLock 从而成为 Active NameNode 之后,创建另外一个路径为/hadoop-ha/ dfs.nameservices/ActiveStandbyElectorLock从而成为ActiveNameNode之后,创建另外一个路径为/hadoop−ha/{dfs.nameservices}/ActiveBreadCrumb 的持久节点,这个节点里面保存了这个Active NameNode 的地址信息。Active NameNode 的ActiveStandbyElector 在正常的状态下关闭 Zookeeper Session 的时候 (注意由于/hadoop-ha/ d f s . n a m e s e r v i c e s / A c t i v e S t a n d b y E l e c t o r L o c k 是 临 时 节 点 , 也 会 随 之 删 除 ) , 会 一 起 删 除 节 点 / h a d o o p − h a / {dfs.nameservices}/ActiveStandbyElectorLock 是临时节点,也会随之删除),会一起删除节点/hadoop-ha/ dfs.nameservices/ActiveStandbyElectorLock是临时节点,也会随之删除),会一起删除节点/hadoop−ha/{dfs.nameservices}/ActiveBreadCrumb。但是如果ActiveStandbyElector 在异常的状态下 Zookeeper Session 关闭 (比如前述的 Zookeeper 假死),那么由于/hadoop-ha/${dfs.nameservices}/ActiveBreadCrumb是持久节点,会一直保留下来。后面当另一个 NameNode 选主成功之后,会注意到上一个 Active NameNode 遗留下来的这个节点,从而会回调 ZKFailoverController的方法对旧的 Active NameNode 进行 fencing。在进行 fencing 的时候,会执行以下的操作:首先尝试调用这个旧 Active NameNode 的 HAServiceProtocol RPC 接口的 transitionToStandby 方法,看能不能把它转换为 Standby 状态。如果 transitionToStandby 方法调用失败,那么就执行 Hadoop 配置文件之中预定义的隔离措施.
Hadoop 目前主要提供两种隔离措施,通常会选择 sshfence:
sshfence:通过 SSH 登录到目标机器上,执行命令 fuser 将对应的进程杀死;
shellfence:执行一个用户自定义的 shell 脚本来将对应的进程隔离;
NameNode 的共享存储实现
NameNode 的元数据存储概述
一个典型的 NameNode 的元数据存储目录结构如图 3 所示 ,这里主要关注其中的 EditLog 文件和 FSImage 文件:
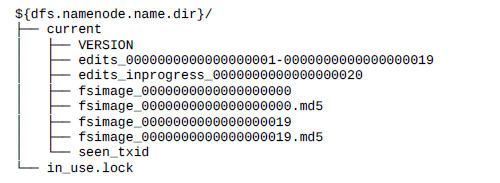
图3 NameNode 的元数据存储目录结构
NameNode 在执行 HDFS 客户端提交的创建文件或者移动文件这样的写操作的时候,会首先把这些操作记录在 EditLog 文件之中,然后再更新内存中的文件系统镜像。内存中的文件系统镜像用于 NameNode 向客户端提供读服务,而 EditLog 仅仅只是在数据恢复的时候起作用。记录在 EditLog 之中的每一个操作又称为一个事务,每个事务有一个整数形式的事务 id 作为编号。EditLog 会被切割为很多段,每一段称为一个 Segment。正在写入的 EditLog Segment 处于 in-progress 状态,其文件名形如 edits_inprogress_ s t a r t t x i d , 其 中 {start_txid},其中 starttxid,其中{start_txid} 表示这个 segment 的起始事务 id,例如上图中的edits_inprogress_0000000000000000020。而已经写入完成的 EditLog Segment 处于 finalized 状态,其文件名形如 edits_ s t a r t t x i d − {start_txid}- starttxid−{end_txid},其中 s t a r t t x i d 表 示 这 个 s e g m e n t 的 起 始 事 务 i d , {start_txid} 表示这个 segment 的起始事务 id, starttxid表示这个segment的起始事务id,{end_txid} 表示这个 segment 的结束事务 id,例如上图中的 edits_0000000000000000001-0000000000000000019。
NameNode 会定期对内存中的文件系统镜像进行 checkpoint 操作,在磁盘上生成 FSImage 文件,FSImage 文件的文件名形如 fsimage_ e n d t x i d , 其 中 {end_txid},其中 endtxid,其中{end_txid} 表示这个 fsimage 文件的结束事务 id,例如上图中的fsimage_0000000000000000020。在 NameNode 启动的时候会进行数据恢复,首先把 FSImage 文件加载到内存中形成文件系统镜像,然后再把 EditLog 之中 FsImage 的结束事务 id 之后的 EditLog 回放到这个文件系统镜像上。
基于 QJM 的共享存储系统的总体架构
基于 QJM 的共享存储系统主要用于保存 EditLog,并不保存 FSImage 文件。FSImage 文件还是在 NameNode 的本地磁盘上。QJM 共享存储的基本思想来自于 Paxos 算法,采用多个称为 JournalNode 的节点组成的 JournalNode 集群来存储 EditLog。每个 JournalNode 保存同样的 EditLog 副本。每次 NameNode 写 EditLog 的时候,除了向本地磁盘写入 EditLog 之外,也会并行地向 JournalNode 集群之中的每一个 JournalNode 发送写请求,只要大多数 (majority) 的 JournalNode 节点返回成功就认为向 JournalNode 集群写入 EditLog 成功。如果有 2N+1 台 JournalNode,那么根据大多数的原则,最多可以容忍有 N 台 JournalNode 节点挂掉。
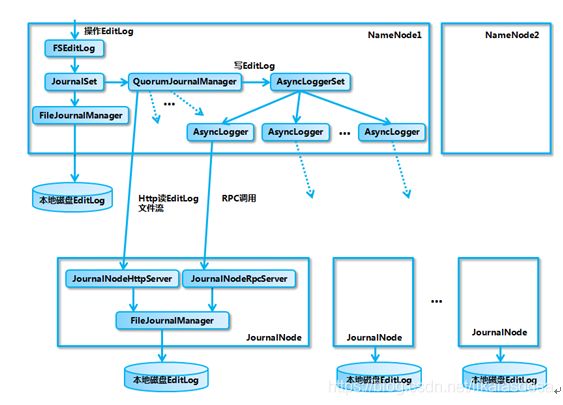
图 4 基于 QJM 的共享存储系统的内部实现架构图
基于 QJM 的共享存储系统的内部实现架构图如图 4 所示,主要包含下面几个主要的组件:
JournalSet: 这个类封装了对本地磁盘和 JournalNode 集群上的 EditLog 的操作,内部包含了两类 JournalManager,一类为 FileJournalManager,用于实现对本地磁盘上EditLog 的操作。一类为 QuorumJournalManager,用于实现对 JournalNode 集群上共享目录的 EditLog 的操作。FSEditLog 只会调用 JournalSet 的相关方法,而不会直接使用 FileJournalManager 和 QuorumJournalManager。
FileJournalManager:封装了对本地磁盘上的 EditLog 文件的操作,不仅 NameNode 在向本地磁盘上写入 EditLog 的时候使用 FileJournalManager,JournalNode 在向本地磁盘写入 EditLog 的时候也复用了 FileJournalManager 的代码和逻辑。
QuorumJournalManager:封装了对 JournalNode 集群上的 EditLog 的操作,它会根据 JournalNode 集群的 URI 创建负责与 JournalNode 集群通信的类 AsyncLoggerSet,QuorumJournalManager 通过 AsyncLoggerSet 来实现对 JournalNode 集群上的 EditLog 的写操作,对于读操作,QuorumJournalManager 则是通过 Http 接口从 JournalNode上的 JournalNodeHttpServer 读取 EditLog 的数据。
AsyncLoggerSet:内部包含了与 JournalNode 集群进行通信的 AsyncLogger 列表,每一个 AsyncLogger 对应于一个 JournalNode 节点,另外 AsyncLoggerSet 也包含了用于等待大多数 JournalNode 返回结果的工具类方法给QuorumJournalManager 使用。
AsyncLogger:具体的实现类是 IPCLoggerChannel,IPCLoggerChannel 在执行方法调用的时候,会把调用提交到一个单线程的线程池之中,由线程池线程来负责向对应的 JournalNode 的 JournalNodeRpcServer 发送 RPC 请求。
JournalNodeRpcServer:运行在 JournalNode 节点进程中的 RPC 服务,接收 NameNode 端的 AsyncLogger 的 RPC 请求。
JournalNodeHttpServer:运行在 JournalNode 节点进程中的 Http 服务,用于接收处于 Standby 状态的 NameNode 和其它 JournalNode 的同步 EditLog 文件流的请求。
基于 QJM 的共享存储系统的数据同步机制分析
Active NameNode 和 StandbyNameNode 使用 JouranlNode 集群来进行数据同步的过程如图 5 所示,Active NameNode 首先把 EditLog 提交到 JournalNode 集群,然后 Standby NameNode 再从 JournalNode 集群定时同步 EditLog:
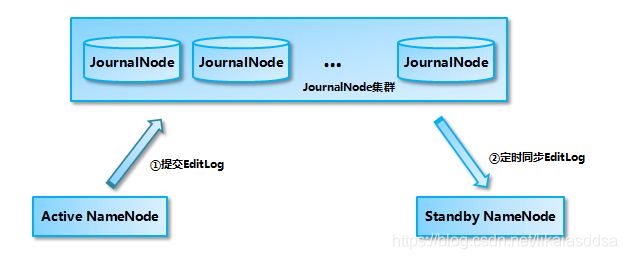
图 5 基于 QJM 的共享存储的数据同步机制
Active NameNode 提交 EditLog 到 JournalNode 集群
当处于 Active 状态的 NameNode 调用 FSEditLog 类的 logSync 方法来提交 EditLog 的时候,会通过 JouranlSet 同时向本地磁盘目录和 JournalNode 集群上的共享存储目录写入EditLog。写入 JournalNode 集群是通过并行调用每一个 JournalNode 的 QJournalProtocol RPC 接口的 journal 方法实现的,如果对大多数 JournalNode 的 journal 方法调用成功,那么就认为提交 EditLog 成功,否则 NameNode 就会认为这次提交 EditLog 失败。提交 EditLog 失败会导致 Active NameNode 关闭 JournalSet 之后退出进程,留待处于 Standby 状态的 NameNode 接管之后进行数据恢复。
从上面的叙述可以看出,Active NameNode 提交 EditLog 到 JournalNode 集群的过程实际上是同步阻塞的,但是并不需要所有的 JournalNode 都调用成功,只要大多数 JournalNode调用成功就可以了。如果无法形成大多数,那么就认为提交 EditLog 失败,NameNode 停止服务退出进程。如果对应到分布式系统的 CAP 理论的话,虽然采用了 Paxos 的“大多数”思想对C(consistency,一致性) 和 A(availability,可用性) 进行了折衷,但还是可以认为 NameNode 选择了 C 而放弃了 A,这也符合NameNode 对数据一致性的要求。
Standby NameNode 从 JournalNode 集群同步 EditLog
当 NameNode 进入 Standby 状态之后,会启动一个 EditLogTailer 线程。这个线程会定期调用 EditLogTailer 类的 doTailEdits 方法从 JournalNode 集群上同步 EditLog,然后把同步的 EditLog 回放到内存之中的文件系统镜像上 (并不会同时把 EditLog 写入到本地磁盘上)。这里需要关注的是:从 JournalNode 集群上同步的 EditLog 都是处于 finalized 状态的 EditLogSegment。“NameNode 的元数据存储概述”一节说过 EditLog Segment 实际上有两种状态,处于 in-progress 状态的 Edit Log 当前正在被写入,被认为是处于不稳定的中间态,有可能会在后续的过程之中发生修改,比如被截断。Active NameNode
在完成一个 EditLog Segment 的写入之后,就会向 JournalNode 集群发送 finalizeLogSegment RPC 请求,将完成写入的EditLog Segment finalized,然后开始下一个新的 EditLog Segment。一旦 finalizeLogSegment 方法在大多数的 JournalNode 上调用成功,表明这个 EditLog Segment 已经在大多数的 JournalNode 上达成一致。一个 EditLog Segment 处于 finalized 状态之后,可以保证它再也不会变化。
从上面描述的过程可以看出,虽然 Active NameNode 向 JournalNode 集群提交 EditLog 是同步的,但 Standby NameNode 采用的是定时从 JournalNode 集群上同步 EditLog 的方式,那么 Standby NameNode 内存中文件系统镜像有很大的可能是落后于 Active NameNode 的,所以 Standby NameNode 在转换为 Active NameNode 的时候需要把落后的 EditLog 补上来。
总结
本文主要分析了HA模式下,active与standby进行切换的流程,其大致流程是active nn通过HealthMonitor线程检测到磁盘空间不足或者rpc调用没有响应,捕获到SERVICE_UNHEALTHY或者SERVICE_NOT_RESPONDING状态,将退出选举,关闭zk连接,此时zk上ActiveStandbyElectorLock临时节点自动删除,standby节点上的watcher监听到NODEDELETED事件,进行抢锁,去zk上创建ActiveStandbyElectorLock节点,创建成功之后进行状态的转换becomActive,在becomeActive时会判断zk上是否存有原active节点创建的ActiveBreadCrumb节点,如果有则进行fence操作,先由FailoverController执行gracefullFence,如果不成功则执行NodeFence的fence方法(fence method有两个,分别是SSHFence和ShellFence),fence成功之后将当前节点的信息写入ActiveBreadCrumb节点,并将当前节点的状态转换为active。原active节点的HealthMonitor线程一直循环检测nn的健康状况,等到nn健康之后再将其加入选举,加入选举也就是创建于zk的连接。
参考:原博客地址:https://www.ibm.com/developerworks/cn/opensource/os-cn-hadoop-name-node/index.html