直流、步进电机综合控制系统设计
一、实验项目名称
直流、步进电机综合控制系统设计
二、实验目的
1、 初步熟悉实验GPIO口的初始化设置,并熟悉实验箱各个模块的功能
2、 掌握步进机的控制原理及利用延时脉冲来改变步进电机速度
3、 掌握直流电机的控制原理及利用pwm占空比控制来改变速度
4、 学习IIC总线读取和写数据原理,掌握对CAT1025、E2PROOM操作方法
三、实验基本原理及设计思路
基于S3C2440处理器分别控制LED灯闪烁,串口打印,RTC显示,步进电机控制和直流电机控制以及EEPROM的读写。
(一) GPIO口设置
S3C2410芯片共计有117个GPIO口,每个GPIO口都至少有三个功能。
每个GPIO口都有三个寄存器:

CON寄存器设置其功能,DAT寄存器设置其高低电平,UP寄存器设置其是否使能上拉电阻。具体设置可参考用户手册。
程序中写了setpin的函数,void setpin(char port,int x,char level),port是端口,x是位,level是高低电平,这样便于对已经初始化的IO口进行指定端口的指定位高低电平设置。让4个LED根据十六进制亮灭主要思路是通过局部变量i,对for(i=0;i<16;i++)进行分类讨论,if(i/8)、if(i/4%2)、if(i/2%2)、if(i%2)进行setpin操作。因为i在芯片中是以二进制存储的,亦可直接让GPIO的GPxDAT寄存器相应的位对i进行与操作来直接控制LED亮灭,能有效提高程序效率。
(二) RTC设置
RTC能够提供时分秒,年月日的计时功能,还具备定时报警功能。RTC单元使用后备电池供电,独立的时钟源(32.768khz)。
部分寄存器如下:

由上图可知对RTC的配置先要对RTCEN位置1,修改对应年月日寄存器后再置0禁止修改,最后在读取,通过串口打印出来。
(三) 步进电机
步进电机是将电脉冲转化为角位移的数据控制电机,电机步距18度。
方向控制:改变ABCD四相高低电平顺序即可控制。(正转AB-BC-CD-DA,反转AD-DC-CB-BA)
速度控制:即改变ABCD四相顺序变化的速度从而改变步进电机速度。
其硬件电路如下图所示:

(四) 直流电机
直流电机的控制需要对照硬件电路图。如下:
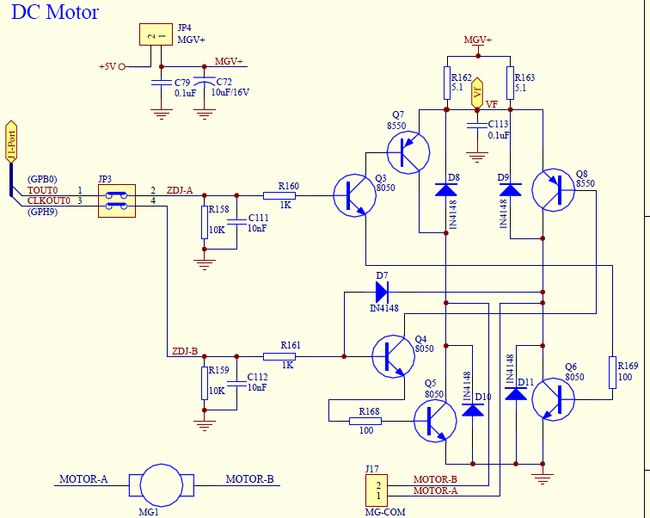
可见它是通过2个IO口和一个全桥驱动电路来控制直流电机的方向和速度的。正转可以用GPB0口的第三功能TOUT0,使用定时器0产生一个PWM波,此PWM的占空比控制电机的转速。反转程序中是将GPH9口置为输出高电平,GPB0依然做PWM输出口使用。此时若PWM占空比为50%,则直流电机不转,占空比大于50%正转,小于50%反转。
(五) IIC,按键和E2PROM
IIC总线有两根线:时钟线SCL,数据线SDA。在读写的时候,首先发送器件地址,而后选中芯片,挂起其他的芯片。之后发送器件子地址,选择读写的单元。最后发送数据。
按键电路图:


按下矩阵键盘的按键,通过I2C总线对ZLG7290读取键值,即可读到键值。值得注意的是,这里的键值是对应按键+1,按下0读取到的键值为1,无按键按下则一直为0,所以我在程序中重写了一个GetKey函数,当读到键值为0时卡死,这样读键值比较容易。有两点可以改进,一是按键的检测可以放到中断里检测,起到一个类似并行效果,能使主程序对按键反馈积极。二是读取GetKey函数里即可把键值-1,从而得到正确值了,而不用将每个值都-1处理。
E2PROM的读写操作:
i2c_opsta=ISendStr(CAT1025, suba, dat_buf1, 10,data_buf2);
i2c_opsta=IRcvStr(CAT1025, suba, recv_buf, 10);
使用以上两个函数对CAT1025数据写操作和读操作,对比写入值和读取值,通过串口打印读取值和是否正确。
部分代码:
void Calculate()
{
char a[4];
uint32 a1,a2;//计算值
uint32 h1,h2,l1,l2;//输入值高低位
uint32 plusor;//加减乘除选择值
char buf[50];
while(back!=9)
{
UART_SendStr(calcu);// "请选择你要进行的运算:\n"
UART_SendStr(add);// "1.加法运算\n"
UART_SendStr(sub);// "2.减法运算\n"
UART_SendStr(mul);// "3.乘法运算\n
UART_SendStr(divi);// "4.除法运算\n"
DelayMS1(2000);
plusor=GetKey();
switch(plusor)//可以把加减乘除写成函数来调用,程序更简洁
{
case 2:
a1= Keynum1(); //从键盘读数
a2= keynum2();//
a[0]=(a1+a2)/100;a[1]=(a1+a2)%100/10 ;a[2]=(a1+a2)%10 ;
sprintf(buf,"%d%d 加 %d%d=%d%d%d \n",h1-1,l1-1,h2-1,l2-1,a[0],a[1],a[2]);
UART_SendStr(buf);a[1]=a[2]=a[3]=0;break;
case 3:……
四、主要仪器设备及耗材
MAGIC2410开发平台,H-JTAG,PC机各一台
五、实验现象
加载程序到SDRAM,全速运行出现人机交互界面:
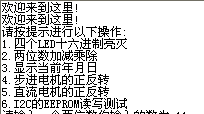
按1键,实验箱的LED按照16进制亮灭

按2键,实现加减乘除

按3键,显示当前年月日。
按4键,实现步进电机正反转和调速:
显示步进电机转动信息
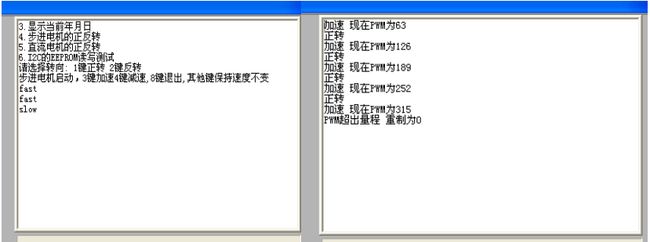
按5键,实现直流电机调速和正反转:
串口调试助手显示直流电机信息
按6键,读写EEPROM:
写入的数据和读出的数据一致
六、实验总结
通过本实验我明白了S3C2410的GPIO的配置,IIC工作时序,步进电机驱动原理、RTC寄存器配置以及直流电机驱动原理,由于原取键值函数中设置了卡死功能导致步进电机只振不转,需要再编写一个取键值函数放在步进电机函数中,另外修改了加减运算顺序不合理的问题。