锁相环APLL仿真介绍
上次发你的文件中有以上几个文件,我们对这几个文件进行详细的研究,当然理论部分不做介绍了,我们对设计的各个模块进行介绍。
![]()
![]()
其电路结构主要包括鉴相鉴频器(PFD)、低通滤波器(LPF)、压控振荡器(VCO)和分频器四部份。环路中使用了模拟的巴特沃斯低通滤波器和模拟的压控振荡器,在压控振荡器的输出端采用一个转换器把模拟信号转换成方波信号。
…鉴相鉴频器(PFD)
锁相环中的鉴相器又称相位检波器或相敏检波器,它的作用是检测输入信号和输出信号的相位差,并将检测出的相位差信号转换成电压信号输出,该信号经低通滤波器滤波后形成压控振荡器的控制电压,对振荡器输出信号的频率实施控制。对输入信号与环路输出信号的相位进行比较, 产生误差控制电压,鉴相电路通常可以分为模拟电路型和数字电路型两大类。
在此模拟锁相环的模型中,鉴相器用一个XOR异或门来实现,因为两路二进制方波异或的结果,只有完全相同才有0输出,丝毫的差异就有非0的输出,差别愈大,输出的1的个数愈多。异或门的真值表如下所示
| A B |
输出 |
1 1 |
0 1 1 0 |
对应的simulink模
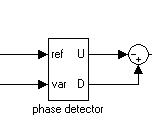
而这个模块的内部结构如下所示:
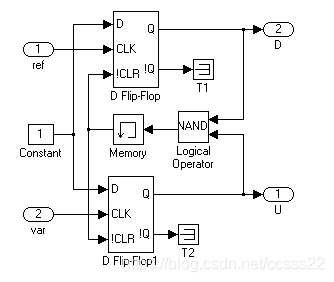
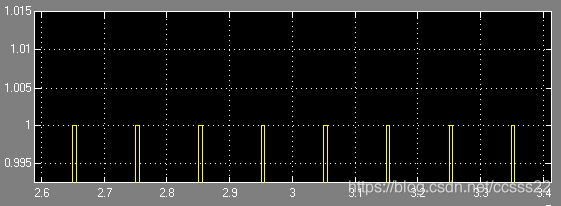
从这里,我们可以看到,其本质上是两个D触发器组成的。其功能是一个XOR模块。其仿真波形如下所示:
…低通环路滤波器(LPF)
在锁相环路中,环路滤波器的设计是决定锁相环路特性的重要问题。参考信号和压控振荡器的反馈信号经过鉴相器的检测输出相位误差,相位差经过低通滤波器滤除其中的高频分量和参杂在信号中的噪音,为压控振荡器提供控制信号。若环路滤波器的滤波效果不理想,则使锁相环路产生自激振荡,由于噪音的干扰,锁相环路将无法进行锁定或者锁定时间变长。对环路滤波器的要求是,在鉴相器的输出端衰减高频误差分量,以提高抗干扰性能;在环路跳出锁定状态时,提高环路以短期存储,并迅速恢复信号。此模型中采用一阶巴特沃斯低通滤波器。
本模块的设计参数如下所示:
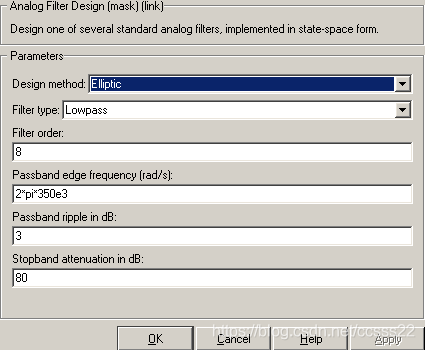
其设计参数分别表示的是滤波器设计方案,滤波器类型,滤波器阶数,滤波器的带通频率,滤波器的带宽,滤波器的截止带宽。
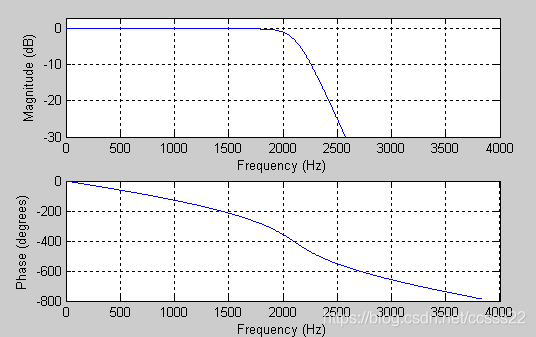
巴特沃斯低通滤波器的频率响应
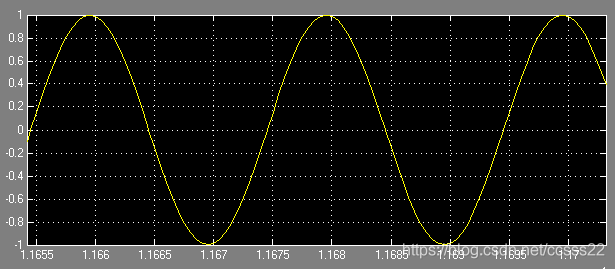
…压控振荡器(VCO)
其仿真结果如下所示:
…分频器
大部分的锁相环路都会在压控振荡器和鉴相鉴频器之间的反馈回路上包含有分频器,以便构成频率合成器。一个可编程的分频器在无线电传输应用中显得特别有用,因为在传输过程中使用的大量频率可以从一个单一的稳定的,精确的,而且较便宜的晶振得到。一些锁相环路在参考时钟和鉴相器的输入回路之间含有分频器。如果分频器的分频系数为M,则压控振荡器的输出频率就等于参考频率乘以N/M,为了使输入到锁相环路的信号的频率较低而在环路中使用分频器这看起来显得比较简单,但是在某些场合当参考频率受到其它因素限制的时候,分频器就显得优为重要。频率相乘可以通过使锁相环中锁定信号的“n”次调谐信号而得到。
整个系统的仿真输出结果如下所示:
![]()
![]()
某些场合对电机调速系统的性能有很高的要求,而基于锁相环技术的调速控制系统在稳速精度方面有其独特的优势.在改进线性锁相环基础上,设计一种软件锁相环直流电机转速控制系统。
锁相环的工作原理,我们在上面已经做了介绍。
我们介绍了锁相环的传统结构,但是研究发现,那种结构的锁相环并不适合电机的精确控制,因为电机的控制涉及到三个类别的误差信号的判断,速度误差信号、速度积分误差信号,速度重积分误差这样,才能做到直流电机速度的精确控制,然后将得到的三路误差信号相加作为误差信号并通过环路滤波输出。在电机控制系统中,锁相环的VCO结构就是我们直流电机,直流电机的输出就是作为系统的反馈信号。
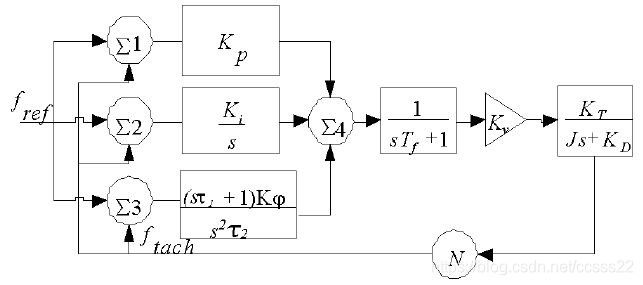
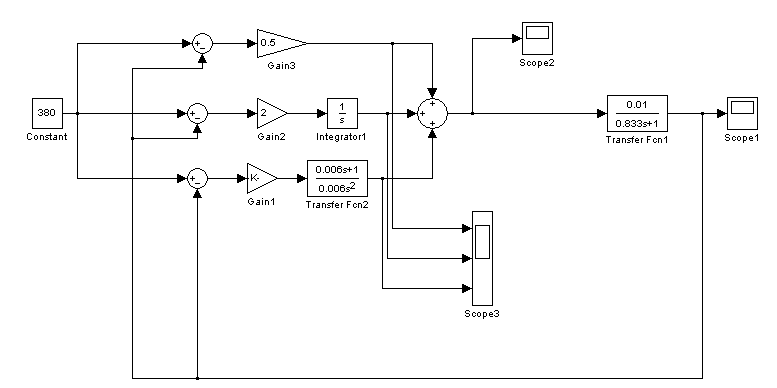
在SIMULINK中,我们建立如下的模型。
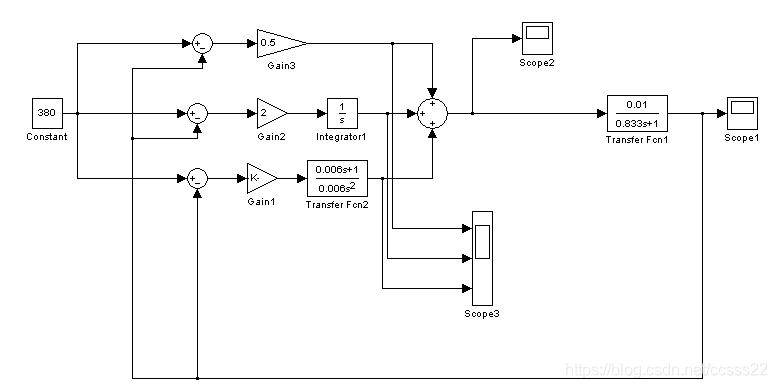
每个模块的参数测试如下所示:
其中我们所要求的三条支路的具体参数设置如下
这个锁相环结构比较简单,但是在电机的控制器中有广泛的应用。
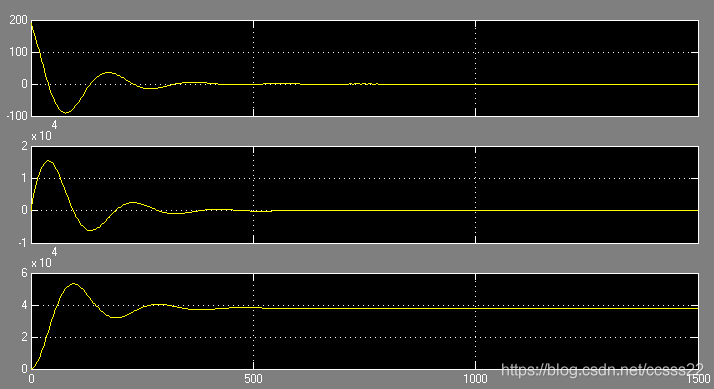
三条支路仿真如下所示:
![]()
通常,为了更能说明直流电机的本质问题,我们才用的是直流电机的数学模型来研究。一般,我们采用的直流电机的模型如下所示:
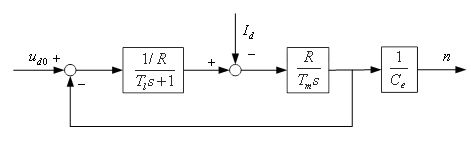
关于直流电机的介绍,您可以查看自己的相关教材。
我们在simulink中建模,其模型如下所示:
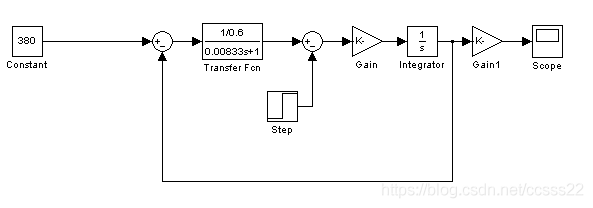
这里通过对比,我们可以看到,
电压设置为380V,
R=0.6
Tl=0.008333
0~2.5s,电机空载,即Id=0;
2.5s~5s,电机满载,即Id=110A。
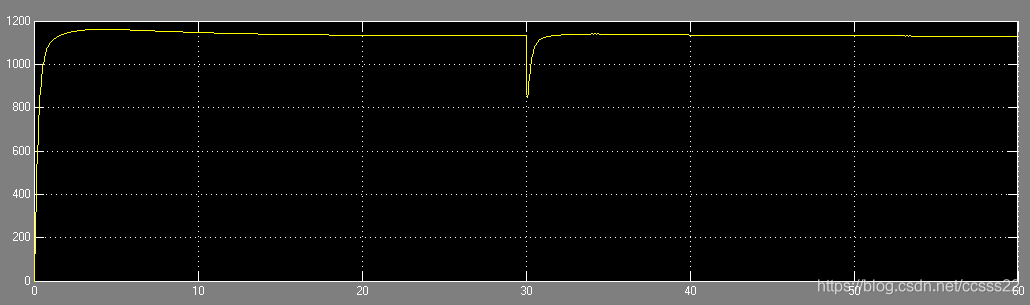
我们通过仿真,可以得到如下的结果:

从上图我们可以看到电机的几个转速指标:
读图知:
空载时转速n=1974.2r/min,
负载时转速n=1631r/min,
静差率s=17.384%
这里可以修改输入的电压, 以及电机的负载
以及电机的负载 。从而修改电机的转速情况。
。从而修改电机的转速情况。
本课题的主要目的就是通过锁相环来控制电机的转速,所以在传统的直流电机控制模块换为锁相环就可以了。此时系统的基本结构如下所示:
而判断一个锁相环是否很好的在控制一个电机,就是判断其是否实现了无静差调速,即系统的静差率越小越好,此外还要解决超调量的问题。下面我们将开始设计基于PLL的直流电机控制器的simulink模型。
Simulink模型的基本结构如下所示:
当加入锁相环控制器的时候,我们还需要了解超调量这个概念,就是控制后,调整过程中最大的值与之后稳定的值的差/稳定值,这个也是一个重要的参数指标。
通过仿真,我们可以看到如下的结果:
这里我们需要调整这三个参数来获得较好的指标,即最小的静差率和最小的超调量。
这里其无静差率,超调量为0.88%。基本符合设计要求。
这里其无静差率,超调量为0.88%。基本符合设计要求。
这里我们根据之前介绍的,再补充系统的设计说明
闭环反馈控制系统是按被调量的偏差进行控制的系统,只要被调量出现偏差,它就会自动产生纠正偏差的作用。而转速降落正是由负载引起的转速偏差,显然,闭环调速系统应该能大大减少转速降落。
·控制器为比例环节时
Kp值越大,稳定后的转速n就越大,超调量也越大,静差率则越小。静差率反映的是闭环反馈效果,s越小,闭环反馈效果则越好,即Kp值越大,闭环反馈效果则越好。在实际中,我们希望得到的是超调量小(即希望Kp小)和闭环反馈效果好(即希望Kp大)的系统,但是这二者却是相互矛盾的。
·控制器为比例积分环节时
超调量和响应时间受Kp、Ki共同控制,在相同Kp下,Ki越大,上升速度越快,响应时间越短,超调量越大;在相同Ki下, Kp越大,上升速度越快,响应时间越短,超调量越大。即Kp*Ki的值越大,上升速度越快,响应时间越短,但是超调量越大(Kp小于1时无超调量)。
静差率在仿真时间内为0,即实现了无静差调速系统。
当Kp取一定值时,Ki的值在增大到一定程度时,会产生振荡发散现象。
比较开环系统与闭环系统知,开环调速系统受到外界的干扰信号影响较闭环调速系统大;闭环系统的静差率比开环系统的小,且带比例放大器的反馈控制闭环调速系统是有静差的调速系统,而采用比例积分调节器的闭环调速系统则基本上实现了无静差调速,闭环反馈效果较好。