边缘检测
Canny边缘检测器是一种被广泛使用的算法,并被认为是边缘检测最优的算法,该方法使用了比高斯差分算法更复杂的技巧,如多向灰度梯度和滞后阈值化。
Canny边缘检测器算法基本步骤:
- 平滑图像:通过使用合适的模糊半径执行高斯模糊来减少图像内的噪声。
- 计算图像的梯度:这里计算图像的梯度,并将梯度分类为垂直、水平和斜对角。这一步的输出用于在下一步中计算真正的边缘。
- 非最大值抑制:利用上一步计算出来的梯度方向,检测某一像素在梯度的正方向和负方向上是否是局部最大值,如果是,则抑制该像素(像素不属于边缘)。这是一种边缘细化技术,用最急剧的变换选出边缘点。
- 用滞后阈值化选择边缘:最后一步,检查某一条边缘是否明显到足以作为最终输出,最后去除所有不明显的边缘。
Opencv使用Canny边缘检测相对简单,代码如下:
import cv2
import numpy as np
img = cv2.imread("hammer.jpg", 0)
cv2.imwrite("canny.jpg", cv2.Canny(img, 200, 300))
cv2.imshow("canny", cv2.imread("canny.jpg"))
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:

Canny函数的原型为
cv2.Canny(image, threshold1, threshold2[, edges[, apertureSize[, L2gradient ]]])
必要参数:
第一个参数是需要处理的原图像,该图像必须为单通道的灰度图;
第二个参数是滞后阈值1;
第三个参数是滞后阈值2。
轮廓检测
轮廓检测主要由cv2.findContours函数实现的。
函数的原型为
cv2.findContours(image, mode, method[, contours[, hierarchy[, offset ]]])
函数参数
第一个参数是寻找轮廓的图像;
第二个参数表示轮廓的检索模式,有四种(本文介绍的都是新的cv2接口):
- cv2.RETR_EXTERNAL表示只检测外轮廓 。
- cv2.RETR_LIST检测的轮廓不建立等级关系。
- cv2.RETR_CCOMP建立两个等级的轮廓,上面的一层为外边界,里面的一层为内孔的边界信息。如果内孔内还有一个连通物体,这个物体的边界也在顶层。
- cv2.RETR_TREE建立一个等级树结构的轮廓。
第三个参数method为轮廓的逼近方法
- cv2.CHAIN_APPROX_NONE存储所有的轮廓点,相邻的两个点的像素位置差不超过1,即max(abs(x1-x2),abs(y2-y1))==1。
- cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息。
- cv2.CHAIN_APPROX_TC89_L1和cv2.CHAIN_APPROX_TC89_KCOS都是使用teh-Chinl chain近似算法。
返回值
如:image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
image:是原图像
contours:图像的轮廓,以列表的形式表示,每个元素都是图像中的一个轮廓。
hier:相应轮廓之间的关系。这是一个ndarray,其中的元素个数和轮廓个数相同,每个轮廓contours[i]对应4个hierarchy元素hierarchy[i][0] ~hierarchy[i][3],分别表示后一个轮廓、前一个轮廓、父轮廓、内嵌轮廓的索引编号,如果没有对应项,则该值为负数。
原图:

示例一
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
# threshold 函数对图像进行二化值处理,由于处理后图像对原图像有所变化,因此img.copy()生成新的图像,cv2.THRESH_BINARY是二化值
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY), 127, 255, cv2.THRESH_BINARY)
# findContours函数查找图像里的图形轮廓
# 函数参数thresh是图像对象
# 层次类型,参数cv2.RETR_EXTERNAL是获取最外层轮廓,cv2.RETR_TREE是获取轮廓的整体结构
# 轮廓逼近方法
# 输出的返回值,image是原图像、contours是图像的轮廓、hier是层次类型
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
# 轮廓绘制方法一
# boundingRect函数计算边框值,x,y是坐标值,w,h是矩形的宽和高
x, y, w, h = cv2.boundingRect(c)
# 在img图像画出矩形,(x, y), (x + w, y + h)是矩形坐标,(0, 255, 0)设置通道颜色,2是设置线条粗度
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 轮廓绘制方法二
# 查找最小区域
rect = cv2.minAreaRect(c)
# 计算最小面积矩形的坐标
box = cv2.boxPoints(rect)
# 将坐标规范化为整数
box = np.int0(box)
# 绘制矩形
cv2.drawContours(img, [box], 0, (0, 0, 255), 3)
# 轮廓绘制方法三
# 圆心坐标和半径的计算
(x, y), radius = cv2.minEnclosingCircle(c)
# 规范化为整数
center = (int(x), int(y))
radius = int(radius)
# 勾画圆形区域
img = cv2.circle(img, center, radius, (0, 255, 0), 2)
# # 轮廓绘制方法四
# 围绕图形勾画蓝色线条
cv2.drawContours(img, contours, -1, (255, 0, 0), 2)
# 显示图像
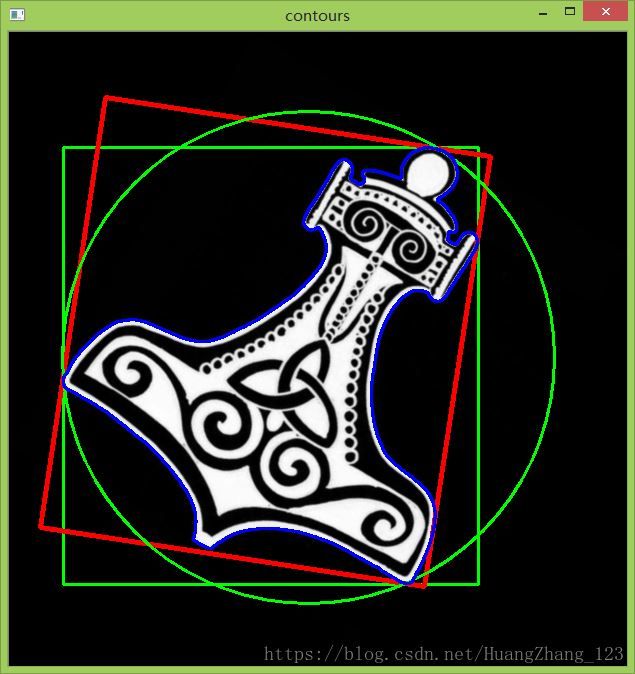
cv2.imshow("contours", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果如图所示:
示例二
import cv2
import numpy as np
img = cv2.pyrDown(cv2.imread("hammer.jpg", cv2.IMREAD_UNCHANGED))
ret, thresh = cv2.threshold(cv2.cvtColor(img.copy(), cv2.COLOR_BGR2GRAY) , 127, 255, cv2.THRESH_BINARY)
# findContours函数查找图像里的图形轮廓
# 函数参数thresh是图像对象
# 层次类型,参数cv2.RETR_EXTERNAL是获取最外层轮廓,cv2.RETR_TREE是获取轮廓的整体结构
# 轮廓逼近方法
# 输出的返回值,image是原图像、contours是图像的轮廓、hier是层次类型
image, contours, hier = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 创建新的图像black
black = cv2.cvtColor(np.zeros((img.shape[1], img.shape[0]), dtype=np.uint8), cv2.COLOR_GRAY2BGR)
for cnt in contours:
# 轮廓周长也被称为弧长。可以使用函数 cv2.arcLength() 计算得到。这个函数的第二参数可以用来指定对象的形状是闭合的(True) ,还是打开的(一条曲线)
epsilon = 0.01 * cv2.arcLength(cnt, True)
# 函数approxPolyDP来对指定的点集进行逼近,cnt是图像轮廓,epsilon表示的是精度,越小精度越高,因为表示的意思是是原始曲线与近似曲线之间的最大距离。
# 第三个函数参数若为true,则说明近似曲线是闭合的,它的首位都是相连,反之,若为false,则断开。
approx = cv2.approxPolyDP(cnt, epsilon, True)
# convexHull检查一个曲线的凸性缺陷并进行修正,参数cnt是图像轮廓。
hull = cv2.convexHull(cnt)
# 勾画图像原始的轮廓
cv2.drawContours(black, [cnt], -1, (0, 255, 0), 2)
# 用多边形勾画轮廓区域
cv2.drawContours(black, [approx], -1, (255, 255, 0), 2)
# 修正凸性缺陷的轮廓区域
cv2.drawContours(black, [hull], -1, (0, 0, 255), 2)
# 显示图像
cv2.imshow("hull", black)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果如图所示:

参考资料:OpenCV 3计算机视觉 Python语言实现第二版
到此这篇关于Python使用Opencv实现边缘检测以及轮廓检测的实现的文章就介绍到这了,更多相关Python 边缘检测内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!