写在前面
首先打个广告。SLAM研究者交流QQ群:254787961。欢迎各路大神和小白前来交流。
看了前面三篇博文之后,是不是有同学要问:博主你扯了那么多有用没用的东西,能不能再给力一点,拿出一个我们能实际上手玩玩的东西啊?没错,接下来我们就带着大家,实际地跑一下视觉SLAM里的那些经典程序,给大家一个直观的印象——因此博文就叫"视觉SLAM实战"啦。这些程序包括:
- RGBD SLAM V2
- SVO
- KinectFusion
- Orb-SLAM
如果你有什么建议,可以发我的邮件或来群里交流。当然,我是边跑边写博客,而不是一口气调通再稀里哗啦写的。所以呢,最后跑的程序可能会和现在的计划有些出入啦。好了,废话不多说,先来介绍下实验器材。
实验器材
1. 硬件
说好的SLAM,没有机器人怎么行?老板,先给我来三份!

这种机器人是Turtlebot的一个改装版本:Viewbot。Turtlebot的详情请参见:http://wiki.ros.org/Robots/TurtleBot/。 Viewbot是上海物景公司做的改装版本,包括可以装些额外的传感器,以及把原来的黑色底板变成透明底板什么的,用起来和turtlebot大同小异,价格1W+。为了避免做广告的嫌疑我就不放链接了。用这个机器人的好处,是ROS有直接对应的包,不用你自己写。一句话即可打开传感器读数据,再一句话就可遥控它,方便省事。
机器人的主要部件就是它的底座和上头的Kinect啦。座子自带惯导,可以估计自己的位置;Kinect么,大家都知道了,不多讲。事实上今天要跑的rgbd-slam-v2不需要座子,只要一台kinect就能动起来。我们用不着那么多机器人,只用一个就行啦(就是贴了标签那台)。
2. 软件
软件方面只需一台笔记,放在机器上跑程序。我用的是一台华硕的ubuntu,装了mac主题包真是山寨气十足啊:
具体的软件配置后面会细说。
3. 环境
环境嘛就是我的实验室,这个也不细说了。
SLAM程序
RGB-D-SLAM-V2程序是由F. Endres大大写的。论文见[1]。为什么首先选这个程序呢?因为它的原理在我们前面的博客中介绍过了。它是一个基于深度相机、Pose graph (图优化)的程序,后端用的是g2o。另一方面,它的代码直接兼容 ROS hydro版,基本不用配置就可以运行,非常方便。下面我们一步步地教大家运行这个程序:
- 从作者主页下载源代码。链接:http://felixendres.github.io/rgbdslam_v2/ 点击右侧的tar.gz或zip下载至本地。
- 下载完成后解压,得到一个包,里面好多文件呀:
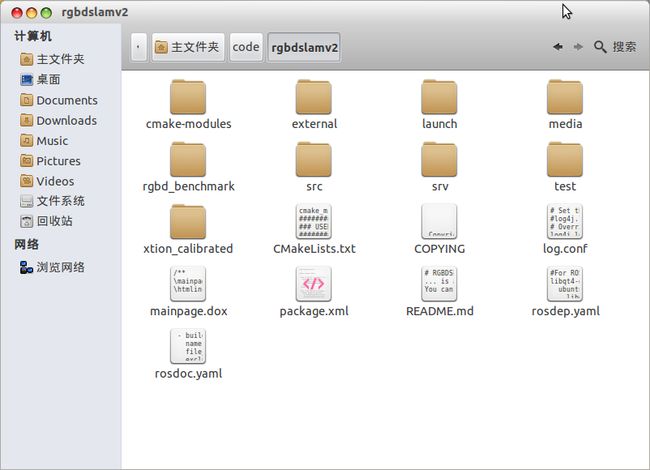
不着急,先从README看起:"RGBDSLAMv2 is based on the ROS project, OpenCV, PCL, OctoMap, SiftGPU and more – thanks!" 你还在等什么?装装装!好在这些东西在Ubuntu下安装,就是几句话搞定的事。
ROS hydro安装指南: http://wiki.ros.org/cn/hydro/Installation/Ubuntu (加ppa源后直接安装)
Linux OpenCV安装指南:http://blog.sciencenet.cn/blog-571755-694742.html (从源代码编译)
PCL:http://www.pointclouds.org/downloads/linux.html (加ppa后安装)
后面几个嘛,装不装就看心情了,即使没有装,rgbd-slam-v2也能运行起来。
3. 装完之后,看"Installation from scratch"一栏,基本照着做一遍即可。作者把命令都给出来了,我就不贴了。装完之后,rgbdslam就在你的ros包里啦。
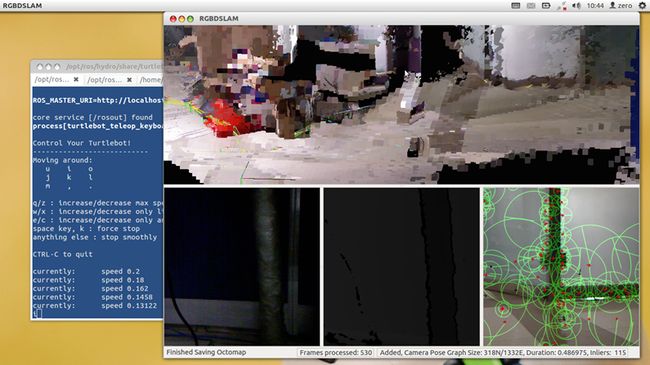
4. 把机器人的Kinect usb口插进电脑,运行 roslaunch rgbdslam openni+rgbdslam.launch,就能看到一个漂亮的界面了。

可以看出作者真的挺用心,居然做了UI。像我这样的懒人绝对不可能做UI的……不谈这些,底下的两个图就是Kinect当前采到的彩色图与深度图,而上面则是3D在线点云图(可以用鼠标转视角)。现在,程序还在待机状态,敲下Enter会采集单帧数据,而敲下空白键则会连续采集。
此外,程序的参数可以在openni+rgbdslam.launch文件中调整。例如特征点类型呀(支持SIFT,SURF,ORB,SIFTGPU),最大特征数量等等。
运行程序
现在,我们连上Turtlebot的遥控端:
roslaunch turtlebot_bringup minimal.launch (启动底座)
roslaunch turtlebot_teleop keyboard_teleop.launch (启动遥控)
按下rgbd-slam-v2的空白键,让机器人四处走起来。UI的状态栏会显示程序的运行状态,我看到过的有 正在提取特征、加入新Frame,等等。如果它成功匹配上,上图的点云就会更新,并且会跟着机器人转动。
我让小车在实验室的一个角上转了几圈。它把中间放置的一堆箱子(实际上是垃圾)都扫出来了。当你觉得满意后,再按下Space键,停止程序。然后从菜单中选出需要保存的东西:机器人的轨迹,最终点云图,等等。轨迹是一个txt文件,而点云图则一个pcd,在安装PCL之后调用pcl_viewer即可查看。
别看上面像是打了码一样的,最后出的点云图可是高清无码的:

轨迹方面,用Matlab写个脚本plot一下即可:
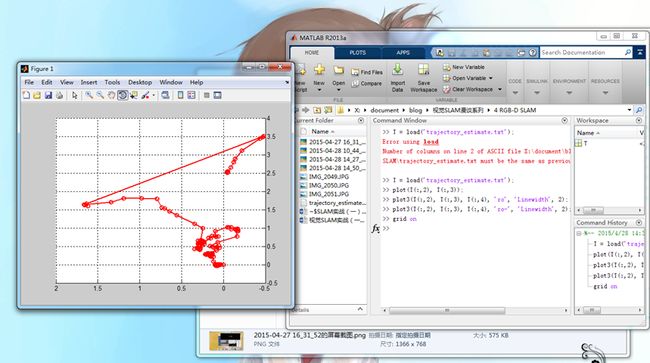
可以看到轨迹上出现了断层,实际上是机器人转的比较快,算法跟丢了,然而之后又通过回环检测给找了回来。
评价
最后,总结一下这个实验吧。
Rgbd-slam-v2是14年论文里提到的算法。它整合了SLAM领域里的各种技术:图像特征、回环检测、点云、图优化等等,是一个非常全面且优秀的程序。它的UI做的也很漂亮,你可以在它的源代码上继续开发。作者也提供了数据集供研究者们测试。
缺点:在美观之外,由于要提特征(SIFT很费时)、渲染点云,这些事情是很吃资源的,导致算法实时性不太好。有时你会发现它卡在那儿不动了,不得不等它一小会。机器人如果走的太快,很容易跟丢。于是我的机器人就真的像只乌龟一样慢慢地在地板上爬了……一旦转头快了,轨迹基本就断掉了。此外,程序采集关键帧的频率很高,稍微一会就采出几十个帧,不太适合做长时间的SLAM。最后合出来的点云有300W+个点,我用网格滤波之后才能勉强显示出来。
参考文献
[1]. Endres et al, 3D Mapping with an RGB-D camera, TRO, 2014.