一维线搜索确定最优步长
目录
- 一维搜索问题
- 进退法确定搜索区间
- 分割技术(0.618)减小搜索区间
- wolfe条件确定步长
4.1 梯度与函数下降的关系?
4.2 wolfe条件
1.一维搜索问题
一维线搜索,就是指单变量函数的最优化,它是专门针对单峰函数设计的:

如上一篇文章所述,多变量函数中,迭代格式为:
如果能找到 αk 使得:
关键还是怎么得到这样的 αk ,在一维搜索中,其主要的想法就是先确定一个搜索区间,然后采用插值法或者分割技术逐渐减小这个区间,直到找到最优的 αk .
2.进退法确定搜索区间
搜索区间,相当于满足 α∗>0的同时, 使得:
其中确定搜索区间的方法之一就是进退法:
- 从一点出发,试图确定函数值的高-低-高三点,沿着搜索方向搜索,如果一个方向不成功,就退回来,沿着相反方向搜索。这样只需比较一个点的函数值大小,就可以确定了。
算法步骤如下:
- α0∈[0,+∞),h0>0,k:=0,计算ϕ(α0)
- 比较目标函数值,令 αk+1=αk+hk ,计算 ϕ(αk+1),若ϕ(αk+1)<ϕ(αk) ,转到第三步
- 加大搜索步长 hk−1:=t∗hk(t一般取2),α:=αk,αk:=αk+1,ϕ(αk):=ϕ(αk+1) 转至第二步
- 反向搜索;若k=0,令 hk:=−hk,αk:=αk+1,转至第二步。否则停止迭代, 得到
a=min(α,αk+1),b=max(α,αk+1)输出,a,b
过程如图所示:

3.分割技术(0.618)减小搜索区间
前面介绍了怎么用进退法确定我们的搜索区间,但区间那么大,也不好求出最优化,因此可以通过切割区间,来减小区间,0.618和Fibonacci就是这样的分割方法。
- 它们的基本思想都是通过取试探点,进行函数值比较,使包含极小点的搜索区间逐渐减小,当区间长度缩小到一定程度时,可以认为区间内的点均为极小点的近似。

0.618法是针对以上的单峰函数的,可以设

第一步迭代:
1. 要求 λk,μk 到搜索区间的两个端点等距;
2. 每次迭代,要求搜索区间的缩短率相同;
用数学表达式表达出来如下:

第二次迭代:

由此得到

迭代到一定条件之后,可以求出我们最初要求的参数:

此外,还有一些分割方法,比如Fibonacci,它和0.618法的主要区别是它的缩短率不是采用黄金分割数,而是采用了Fibonacci数,Fibonacci数列满足:
4.wolfe条件确定步长
在一些实际问题中,目标函数如果不可微,就可以采用0.618法来确定步长,但也有很多情况下目标函数是可微的,一旦可微,我们就可以计算他们的梯度了。
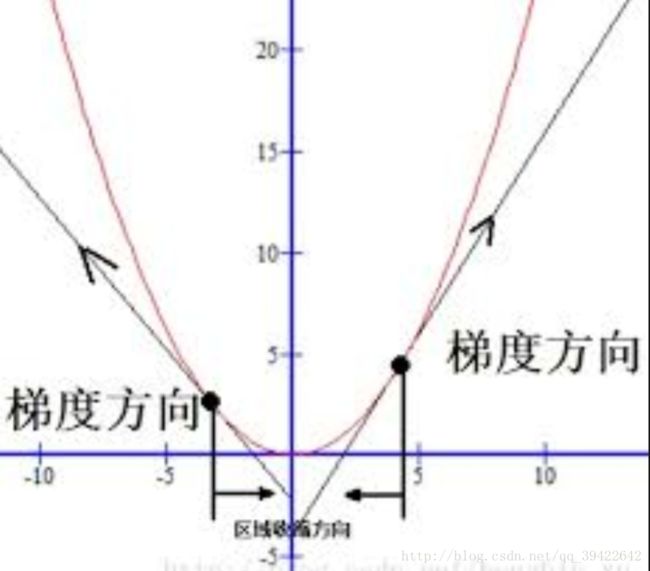
4.1 梯度与函数下降的关系?
很多人有这样的疑问,梯度有什么用?
如图所示为梯度方向,如果梯度小于0,则必然是相反方向,也就是函数下降的方向,这是一个直观的看法,下面用公式证明这个结论。
定义:设 f 是 Rn上的实函数,d∈Rn。 若存在某个正数 α⎯⎯>0使得
再给出一个定理:设 f:是Rn→R 在x处可微,若存在 d∈Rn 使得
为了看一下这个的准确性,现在给出证明。
证明:由Taylor定理,对于任意的 α>0, 我们有
由此我们发现,只要 ∇f(x)≠0, 那么下降方向 d 一定存在,因为即使 ∇f(x)>0, 我们可以取它的负方向作为下降方向。
4.2 wolfe条件
大于0的正数 α 作为步长,在函数下降方向总有:
但直接用该条件确定步长有可能使得步长太小,故使用后退技巧:选取 0<t<1 ,找到一个最小的非负整数j,使得
如果该条件加上曲率条件,就构成了Wolfe条件:
参考
最优化理论与方法 –袁亚湘
最优化选讲