扫地机自动回充揭秘之科沃斯T8
扫地机自动回充揭秘 之开启篇
对扫地机自动回充陌生的伙伴们可以先阅读扫地机自动回充揭秘 之开启篇
科沃斯是国内很早开始做扫地机的,起初对标国外iRobot,现在基本处于各有优势,不分伯仲的位置。作为国内扫地机的领头羊,其研发的科沃斯T8-AVI扫地机智能程度上了一个台阶,博主因研发需要,接触了多款扫地机,包括科沃斯、石头、小米、iRobot、360、云鲸等,讲真科沃斯智能规划清扫、识别电线、避开粘稠物体、清扫效率、自动回充等个人感觉做的还行。接下来和伙伴们分享我实测的科沃斯自动回充功能。
1. 结构外观
我们先看一下充电座长什么样,如图1所示,黑灰组合,黑色透明外壳起过滤光线和防护的作用,灰色部分为基座,贴近地面的2个银白色触点是充电触点,和扫地机机身的两个触点对应,整体感觉协调、规矩还耐脏。
 图1:充电座外观
图1:充电座外观
伙伴们一定好奇黑色透明滤光片里面长什么样子吧,其实我也看不清,博主尝试拆解,试了试还挺难拆的,估计结构设计的大师可以找到窍门;那有没有别的方法,博主灵机一动,想着红外摄像头拍摄便可以透过滤光片看清里面的部件,刚好实验台有一枚红外摄像头,于是就开始探索,揭开内部的神秘面纱(大白话就是不好拆,绕个弯子达到目的,还省事,哈哈),如图2所示。伙伴们好奇这为啥不是彩色图,红外图不是彩色的哈,这是原图来着。
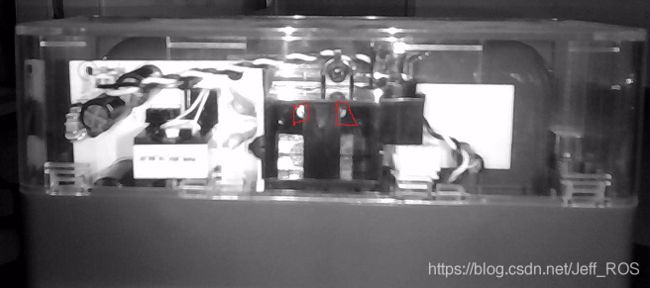 图2 充电座正面红外图
图2 充电座正面红外图
图2中红色标记为正面左右对准的红外发射灯,且红外发射经过结构分割后只发射至正前方,依据博主的调研/经验,一般充电座上都有4个红外,左侧和右侧分别还有两个,用于引导扫地机回中轴线上(即图2中红色标记处红外发射等所能扫射的中间区域)。博主特意拍摄两侧的红外图,没发现有红外发射灯,可以确定科沃斯T8利用其它传感器引导扫地机至充电充电座的中轴线上。伙伴们可能好奇:红外图是黑白的,里面那些部件都是黑白色,怎么区分出红外发射灯?这里悄悄公布答案,插上电源,里面闪烁发光类似LED等的就是了。
充电座中和自动回充有关的部件探索完了,我们来看看扫地机机身中和自动回充有关的部分。图3所示,机身顶部是360度激光扫描传感器,正前方装有摄像头,摄像头两侧是两个线红外发射器,具体我也不知道是什么,我用红外相机拍摄可以看到两侧交叉打在物体上的水平长条,不知是测距的作用,还是主动纹理增加的作用,亦或者是夜间补光作用,知道的伙伴们可以留言告知一下。和充电座类似,黑色透明的是滤光片外科,肉眼看不太清里面长什么样。老办法,咋们用红外摄像头一探究竟。
 图3 科沃斯机身正面RGB图
图3 科沃斯机身正面RGB图
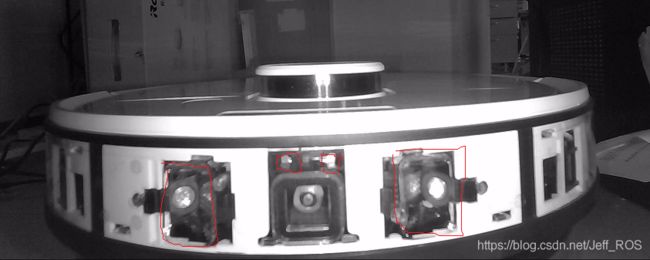 图4 科沃斯机身正面红外图
图4 科沃斯机身正面红外图
如图4所示为机身前侧红外图,是不是很清晰,感觉剥去了黑色外衣。图中中间部件是摄像头,红色标记的大方框是线红外发射灯,左右各1个;摄像头上面的红色小方块是2个对准的红外接收器。到目前为止,科沃斯T8的自动回充的关键传感器部件基本搞清楚了,总结一下:充电座上2个对准红外发射器,机身有激光扫描器、摄像头、对准红外接收器。那科沃斯用的是什么方法实现自动回充的呢?
2. 科沃斯回充方法探究
在开启篇https://blog.csdn.net/Jeff_ROS/article/details/112860628中提到了,扫地机自动回充方法有单红外,红外摄像头,激光,超声等,这里没有看到超声雷达传感器,所以排除超声雷达这个方法;再者,充电座上只安装有2个对准红外发射灯,故而不可能是单红外传感器的方法,因为需要引导扫地机向中轴线移动的传感器。那其他二种方法到底是哪一种呢?还是有相互结合互补?带着这个疑问,博主制定了简单的测试方法,即通过遮挡对应的传感器,对比不遮挡传感器的回充区别,判断其使用的自动回充方法。
首先一起来看一下正常无遮挡情况下的回充,博主这里录制了一个视频,链接https://live.csdn.net/v/146350,从视频中可以发现,自动回充是比较666的,大概的过程分为3步走:
(1)、旋转确定机身相对于充电座的方位;
(2)、向中轴线移动;
(3)、旋转朝向充电座,对准充电座,缓缓向充电座移动至触发充电。
经过几轮测试(视频中只记录了一次),回充过程中机身基本能够一次性到达中轴线,一次性朝充电座移动至触发充电,成功率接近99.9%。但是机身放在充电座齐平的位置(即假如充电座靠墙,机身初始位置也靠墙),那么回充会折腾一些。
接下来我们把机身顶部的激光遮挡,博主同样录制了一次视频,链接https://live.csdn.net/v/146350,从视频中可以看出,科沃斯T8和无遮挡回充的过程一样666,基本上没有啥区别。可以排除回充利用到激光传感器的方法,那猜测就是“摄像头+红外对准了”,初步猜想其回充方法是:相机传感器引导机身至中轴线,再通过红外引导至充电座(也可能结合了视觉)。带着猜想我们继续做测试。
这次我们把机身的红外对准遮挡,博主同样录制了一次视频,链接https://live.csdn.net/v/146356,从视频中看出,扫地机顺利移动至中轴线(充电座正前方)之后,旋转探寻,没有对准发现,接着继续侧边小范围移动旋转探寻,都没有找到,宣告回充失败。所以“相机传感器引导机身至中轴线”这一猜想成立。那么引导至充电座的过程中有没有结合视觉呢?目前来看大概率没有结合视觉,也存在另一种可能:视觉作为辅助,红外引导占主导,当对准红外无效时,回充失败。那么具体用什么方法,那就不得而知了,算法与软件实现这一块咱们但从硬件是没法探寻的。
3. 科沃斯自动回充总结
看到这里,想必伙伴们已经很清晰了,科沃斯T8的自动回充的方法------红外融合视觉传感器。融合的方法大概率是视觉传感器引导扫地机至中轴线,红外对准引导至充电座触发充电。好了,读者可以开始点赞或打赏了!
至此,第一篇总结完成了,后面准备写第二篇,探索石头扫地机的自动回充方法,分享给大家,希望可以抛砖引玉,和大家共勉,欢迎各位大神交流!!!