pix4d怎么查看点云数据_ContextCapture,PhotoScan,Pix4D基于倾斜摄影技术的三款建模软件比较研究...

随着无人机航拍摄影技术的高速发展,诸多领域逐步糅合了无人机技术,这项技术在灾情监视、交通巡逻、治安监控、地球物理勘探以及海岸缉私等方面广泛应用开来。无人机倾斜摄影建模技术随着无人机航拍技术的发展应运而生,由于其相较于传统三维建模方式拥有低成本、高机动性、高精度、高时效的优点,因此倾斜摄影建模正逐渐成为重要的建模手段之一,在数字城市的发展过程中发挥着重要作用。
倾斜摄影建模软件是基于倾斜摄影技术开发的三维建模软件,以无人机采集的连续航片影像为基础,利用图形运算单元GPU,可以快速、精确、自动地生成逼真的实景三维场景模型。通过分析实景三维模型可以得到真实场地的三维坐标、视域情况、坡度坡向与现状建筑等信息,因而倾斜摄影建模软件正广泛应用于山地的测绘和规划、城镇建设规划与古建筑保护等诸多领域。
目前,法国Acute3D公司推出的ContextCapture、俄罗斯Agisoft公司开发的PhotoScan以及瑞士Pix4D公司Pix4Dmapper是业界主流的倾斜摄影建模软件。在实际的使用过程中,消费级无人机飞行姿态不稳定且搭载非测量相机,所采集的航片存在影像畸变大、像幅小、像片数量多的特点;软件的算法和逻辑上的差异,使得软件运算时长、模型精度与贴图质量明显不同。
01技术背景及软件介绍
1.1 倾斜摄影技术
倾斜摄影技术是通过在同一飞行平台上搭载多镜头相机,在飞行过程中从垂直、倾斜等多个角度同时采集影像,获取更为完整精确的地面地物信息。在建立建筑物模型与表面纹理的过程中,垂直影像中包含建筑顶面信息,倾斜影像能够提供地物侧面的视角,两者结合满足生成建筑物表面纹理和模型的需要(图1)。

1. 垂直摄影采集的影像(左)与倾斜摄影采集的影像(右)
1.2 倾斜摄影建模软件
倾斜摄影建模软件是基于倾斜摄影原理开发的三维建模软件。将具有一定重叠度的无人机航拍倾斜摄影数据导入建模软件,计算机中的图形处理GPU会结合像片所包含的POS信息自动进行空中三角测量计算,生成点云并加密为密集点云,构成三角网格模型,最后结合倾斜影像中的像素信息生成富有纹理的三维模型(图2)。

2. 倾斜摄影建模的生产路线
(1)ContextCapture。2011年,飞利浦·庞斯(Jean-Philippe Pons)博士和雷洛·卡拉文(Renaud Keriven)博士联合创立了Acute3D公司,推出了一款突破性的摄影测量产品Smart3DCapture。2015年2月,Acute3D公司被Bently收购,产品升级为ContextCapture,该软件能基于图形运算单元GPU处理来自于数码相机、航拍照片、激光雷达的多源摄影数据,生成超高密度点云,并进一步生成以高分辨率影像为纹理的三维实景模型。三维模型的输出格式包含OBJ、OSGB等通用模型格式,可以自由地导入各种模型编辑软件与基于GIS平台开发的模型浏览管理软件。
(2)Agisoft PhotoScan。它是俄罗斯Agisoft公司开发的倾斜摄影建模软件,可根据影像数据自动生成高质量三维模型。基于多视图三维重建技术,PhotoScan可以处理任何照片,而无需设置初始值、相机检校与控制点。当提供控制点时,可以生成具有高精度和真实坐标的3D模型。该软件支持多种格式的数据源,经计算后生成高分辨率正射影像与带精细色彩纹理的DEM模型。
(3)Pix4Dmapper。原为Pix4UAV,是瑞士Pix4D公司推出一款无人机数据和航空影像处理软件,拥有自动、专业、高精度的特性。Pix4D能够大量航拍影像快速制成高精度、带地理坐标的正射影像图与三维模型数字产品。其特点在于拥有一套专业的工作流程,包含了从数据的采集到项目处理再到数据分析的完整算法。
02技术路线
本文介绍了倾斜摄影技术的概念与三款倾斜摄影建模软件的基本情况,并以实际案例中采集的航拍影像为数据基础,严格控制各项输入参数,评价三款软件的操作过程、空中三角测量精度以及软件运算时长方面的表现。最后,通过软件生成模型质量的对比说明三款建模软件存在的优势与局限性并进一步提出三维模型单体化方法,为倾斜摄影建模软件在园林设计中的选择与应用提供依据,满足设计对三维模型的需求(图3)。
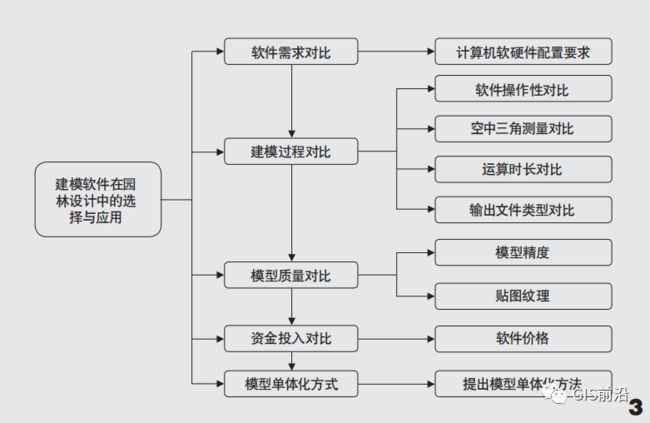
3. 软件对比的技术路线
03实验流程
3.1 测区概况
佘村位于江苏省南京市江宁区东山街道,地处黄龙山与大连山之间峡谷地带,南临佘村水库,依山傍水,环境优越。佘村历史悠久,由一百多个自然村发展而来,总面积约7.2 km2。村中保留的明清古建筑、古井、古石灰窑等历史遗迹与稻田灰瓦、青山绿水共同构成宁静悠远的山村生活画卷。本次实验场地选择的是沿上佘路东西两侧分布的村落以及部分农田自然林地与水塘,地理位置为31°58′47″~31°59′10″N,118°55′12″~118°55′37″E,总面积为30.3 hm2。
场地内大量植被、建筑以及两处公园包含丰富的纹理信息与空间变化,可用于对比倾斜摄影模型的质量及纹理 ;村庄中央的村委会与潘氏故居可以作为建筑模型单体化的重要实验数据(图4)。
4. 测区范围与概况
3.2 无人机型号及相机参数
本次实验中使用的是深圳大疆创新科技有限公司于2015年发布的“精灵”系列Phantom 3 Professional,主要参数如表1。

3.3 航片成果与像控点布设
预设飞行高度110 m,航向重叠度75%,旁向重叠度70%,地面影像分辨率为0.04 m,飞行作业时间40 min,航带5条,共获得190张航拍影像与对应POS数据。场地内均匀分布15处像控点(4个控制点与11个检查点),在布设时优先选择地面有明显特征的标注点,其余像控点用自喷漆手动绘制,测量仪器为中海达RTK,坐标系采用2000国家大地坐标系。
3.4 数据处理流程
3.4.1 ContextCapture数据处理流程
(1)新建工程项目,依次填写项目名称与存储路径 ;
(2)添加影像文件与POS数据,并检查影像文件的完整性 ;
(3)在Surveys选项卡下的控制点编辑器中导入像控点文件(txt或csv格式),为了避免长距离几何失真和提高控制精度,每个控制点定位3张以上像片;
(4)填入工作目录名称和各项参数后提交;
(5)激活Engine模块,软件自动进行空三运算 ;
(6)提交新建重建任务,在空间框架选项卡下,对模型进行分块设置,本次实验平面切块的网格大小250 m,共计9个瓦片 ;
(7)提交模型生产并选择模型输出格式、贴图质量、坐标系、建模范围以及输出路径;
(8)模型输出(图5)。
5. ContextCapture生成三维模型
3.4.2 Agisoft PhotoScan数据处理流程
(1)点击菜单栏“工作流程”的“添加照片”选项,导入航
拍影像后双击缩略图检查文件的完整性,并添加POS数据;
(2)对齐照片后添加控制点与比例尺 ;
(3)选择建模区域控制运算点的数量,设置密集点云的参数后等待软件自动处理 ;
(4)在点云的基础上建立三维网格模型 ;
(5)创建模型纹理贴图,生成高分辨的TIN模型或生成正射影像和数字高程模型DEM
(图6)。
6. Agisoft PhotoScan生成三维模型
3.4.3 Pix4Dmapper数据处理流程
(1)新建工程设置名称和存储路径 ;
(2)添加影像后设置
坐标系与POS数据 ;
(3)导入控制点文件并在像片上进行刺点 ;
(4)根据需要填写运算参数 ;
(5)点击菜单栏“运行”,在本地全自动处理,依次进行空三加密、DSM与DOM生成 ;
(6)生成正射影像并输出多种格式成果(图7)。

7. Pix4Dmapper生成三维模型
04处理流程及建模成果对比
4.1 软件硬件需求对比

4.2 操作性对比
ContextCapture与其他两款软件相比操作最为复杂,操作步骤多,主从模式、编辑控制点与约束水面具有一定的专业性和复杂性。PhotoScan的操作难度次之,除了添加像控点需在参考选项卡下进行,其余的操步骤按先后顺序排列在“工作流程”选项卡中,在进行每个操作前设置相应参数即可。
Pix4D的操作最为简单,基本可分为三大步骤:
(1)导入影像与控制点文件;
(2)填写选项参数 ;
(3)本地运行全自动处理生成模型。
4.3 空中三角测量对比
ContextCapture Engine是执行计算工作的控制模块,它可以在后台自动完成建模任务中的空中三角测量和三维模型重建过程。在运算过程中Engine模块采取不同的且计算量大的密集型算法,如关键点的提取、自动连接点匹配、集束调整、密度图像匹配等,因此在控制量测、POS平差、匹配能力等方面都要优于其他两个软件。PhotoScan存在部分连接点的匹配精度较差的问题,需要少量人工干预才能顺利计算,并且处理效率及匹配方面不及其他两款软件。Pix4D的空三测量的能力略优于PhotoScan,空三精度报告有具体的窗口分栏且内容详细。
4.4 输出文件格式
ContextCapture在输出时可依据三维模型生产后的用途选择合适的数据生产格式,支持的最终效果导出格式包含 :3MX格式(ContextCapture自有格式,可与Bently其他应用程序交互并具有压缩、LOD纹理及模型多重精细度结构的特性)、OBJ格式(开源数据格式)、OSBG格式等十余种文件格式。PhotoScan在生成三维模型后可通过“文件”菜单栏中“导出模型”选择输出文件格式,格式种类与Smart3D基本一致,并额外支持3DS格式。
Pix4D在输出格式上的选择较少,生成正射影像图时可选GeoTiff与谷歌地图KML格式,三维模型仅可选择OBJ与PLY格式。
4.5 计算时间长短对比
ContextCapture运算时间最长,完成整个数据处理约用时8 h,其中空中三角测量耗时较短,模型重建与生成纹理用时较长。PhotoScan计算时间稍短,约6.5 h,而Pix4D在软件运算上耗时最短,仅用5 h左右完成了整个三维重建工作。
4.6 模型精度对比
三维模型的精度可以通过控制点误差进行评价。本次实验利用4个像控点作为控制点进行区域网空三平差,其余11点作为检查点效验模型精度。三款软件的平面误差基本控制在0.1 m之内,只有Pix4D在2号检查点处误差达0.152 m。
ContextCapture各控制点的平面误差明显低于其他两者,PhotoScan平面误差略低于Pix4D(图8)(表3)。三款软件在垂直误差方面的差距较小,检查点垂直误差集中在0.12 m左右。ContextCapture与Pix4D垂直方向标准差结果相近,PhotoScan在2号、6号与10号点的垂直误差超过0.2 m,因此标准差高于另外两款软件(图9)。综合来看,ContextCapture在水平方向与垂直方向对误差的控制较好,三维模型精度优于其他两款软件。
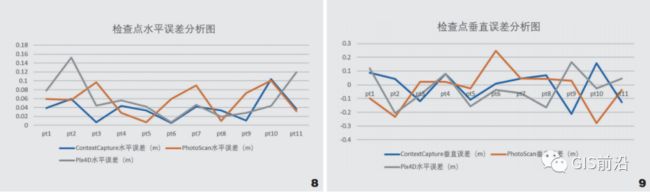
8. 检查点平面误差分析图 9. 检查单垂直误差分析图

从三维模型成果上来看,ContextCapture模型整体效果出色,将村庄全貌通过三维模型很好地展现出来,但部分水体由于光线反射生成对的倒影在建模时造成失真与空洞,需要后期手动修复完善模型。模型细节精度很高,以马头墙以及院内停放的车辆为例,详细地刻画出场景的三维效果(图10)。
PhotoScan整体效果较好,将村庄整体样貌描摹出来,但细节部分出现结构缺失的问题(图11)。Pix4D模型效果介于两者之间,整体效果较为出色,但细节部分的模型不足以达到以假乱真的效果(图12)。

10. ContextCapture局部模型效果 11. PhotoScan局部模型效果 12. Pix4D局部模型效果
4.7 纹理贴图对比
ContextCapture贴图是以真实航拍影像为纹理,因而纹理清晰细腻,对于真实场景的色彩和纹理的模拟表现出色(图13)。

PhotoScan贴图颜色较浅,但细节丰富,由于三维模型的效果不够出色,对纹理贴图的展示带来一定影响(图14)。

Pix4D贴图细节介于两者之间,色彩丰富但纹理略显不足(图15)。

建筑侧面纹理信息的获取是本次实验的重要组成部分,有助于进行现状建筑质量、建筑风貌、建筑层数的分析。ContextCapture与PhotoScan建筑侧面纹理丰富真实,可以清晰地观察到建筑的门窗等细节。Pix4D效果一般,对建筑立面的刻画模糊,门窗仅有基本轮廓。
4.8 其他辅助功能对比
ContextCapture在Acute3D Viewer中提供部分测量功能,包括 :模型坐标、线段测距、面积以及体积的计算。PhotoScan提供的额外功能较少,只能进行简单的测量坐标与测距,其余功能需要在三维模型编辑软件中进行。Pix4D除了提供测量场地高程海拔分析功能和生成热成像图,还可以设置动画路径,制作以三维模型为基础的视频动画。
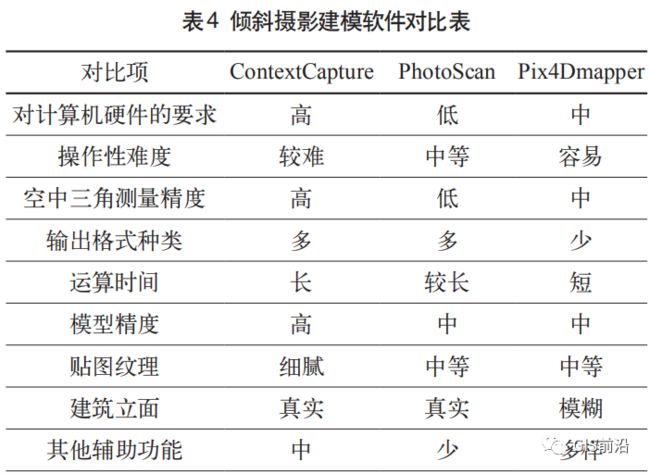
4.9 软件对比汇总
三款软件在硬件要求、操作难度、模型精度等方面有着不同的表现,根据实验结果,从多个方面综合评价三款倾斜摄影建模软件(表4)。
模型单体化研究
与人工建模方式不同,倾斜摄影建模软件所自动生产的 三维实景模型是一个三角网构成的整体,不会将建筑、地面、 树木等需要单独管理的对象分离为单独模型。这种模型虽然 可以用于转化为栅格数据模型用于场地的高程、坡度、坡向等分析,但是不能单独选择对象添加信息属性,难以满足风 景园林设计的对象化管理需求。因此,需要进行一定的处理才能实现模型“单体化”。
ContextCapture生产的数字模型贴图细腻、模型准确,在此基础上使用SuperMap对潘氏住宅与村委会两处建筑进行单体化处理并添加属性信息。当选中目标建筑时会出现高亮显示, 并可以查询被赋予的属性,满足对象化管理需求(图16)。

16. 倾斜摄影模型单体化
文章转载于:园林
原标题:基于倾斜摄影技术的三种建模软件比较研究——以南京佘村为例
作者:杨云峰 魏天宇 郝晶晶
部分有所删减,本文仅限行业学习交流之用,版权、著作权归原载平台及作者所有,如有侵权请告知删除
- END -
实测大疆智图与CC(Smart3D)三维建模、正射拼图对比 CC由基础→进阶非常全面详细的教程(pdf可下载)提高空三效率、提升模型效果 CC(Smart3D) Pix4D PhotoScan 基础入门教程全面汇总(附文档教程下载) Pix4D航测成图完整教程(空三,点云编辑DSM,正射,质量报告分析...) 跑三维到底要啥配置?!40000元来组建建模集群 全面详细的PhotoScan官方教程——生成正射影像和DEM