目标检测(三)——IoU总结与代码实现(可完整实现)
文章目录
- IoU基本含义
- 代码实践
-
- 0. 导入的基本库
- 1. Bounding box 表示
- 2. 边界框矩形的绘制
- 3. 为xywh格式的bbox数据提供坐标变换
- 4. IoU计算
- 5. 演示代码
- 结果图片
IoU基本含义
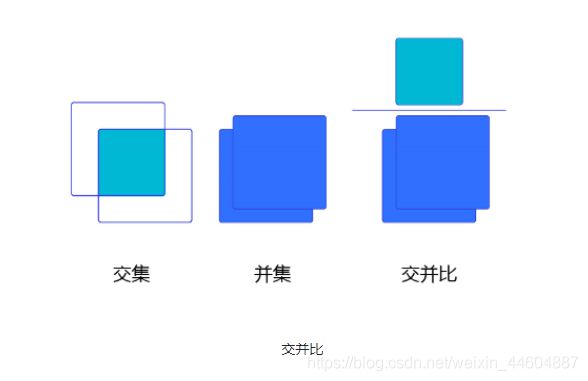
IoU: 简单来说,就是锚框与真实框的交集与锚框与真实框的并集之比。
I o U = A ∩ B A ∪ B IoU = \frac{A∩B}{A∪B} IoU=A∪BA∩B
其中:
- A 是真实框
- B 是预测框——也就是锚框
形象的表示为:
如何确定A,B之间的交集呢?
首先,假设A,B的bbox数据:
A = [ x a 1 , y a 1 , x a 2 , y a 2 ] B = [ x b 1 , y b 1 , x b 2 , y b 2 ] A = [x_{a1}, y_{a1}, x_{a2}, y_{a2}] \\ B = [x_{b1}, y_{b1}, x_{b2}, y_{b2}] \\ A=[xa1,ya1,xa2,ya2]B=[xb1,yb1,xb2,yb2]
而此时的交集情况:

因此,交集的左上角坐标就是A,B的左上角x,y的最大值:【以x向右为正,y向下为正,均从0开始】
i n t e r x 1 = m a x ( x a 1 , x b 1 ) i n t e r y 1 = m a x ( y a 1 , y b 1 ) inter_{x1} = max(x_{a1}, x_{b1}) \\ inter_{y1} = max(y_{a1}, y_{b1}) \\ interx1=max(xa1,xb1)intery1=max(ya1,yb1)
而右下角的顶点则是A,B的右下角最小值:
i n t e r x 2 = m i n ( x a 2 , x b 2 ) i n t e r y 2 = m i n ( y a 2 , y a 2 ) inter_{x2} = min(x_{a2}, x_{b2}) \\ inter_{y2} = min(y_{a2}, y_{a2}) \\ interx2=min(xa2,xb2)intery2=min(ya2,ya2)
此时,交集的长宽就可以得到了:【长度由具体的像素个数决定,因此需要加1】
i n t e r w = m a x ( i n t e r x 2 − i n t e r x 1 + 1.0 , 0. ) i n t e r h = m a x ( i n t e r y 2 − i n t e r y 1 + 1.0 , 0. ) inter_{w} = max(inter_{x2} - inter_{x1} + 1.0, 0.)\\ inter_{h} = max(inter_{y2} - inter_{y1} + 1.0, 0.)\\ interw=max(interx2−interx1+1.0,0.)interh=max(intery2−intery1+1.0,0.)
因此,交集面积:
S i n t e r = i n t e r w ∗ i n t e r h S_{inter} = inter_{w} * inter_{h} \\ Sinter=interw∗interh
最后我们计算一下并集的面积:
A, B框的面积:
S A = ( x a 2 − x a 1 + 1.0 ) ∗ ( y a 2 − y a 1 + 1.0 ) S B = ( x b 2 − x b 1 + 1.0 ) ∗ ( y b 2 − y b 1 + 1.0 ) S_{A} = (x_{a2} - x_{a1} + 1.0) * (y_{a2} - y_{a1} + 1.0) \\ S_{B} = (x_{b2} - x_{b1} + 1.0) * (y_{b2} - y_{b1} + 1.0) \\ SA=(xa2−xa1+1.0)∗(ya2−ya1+1.0)SB=(xb2−xb1+1.0)∗(yb2−yb1+1.0)
并集面积:
u n i o n a r e a = S A + S B − S i n t e r union_area = S_{A} + S_{B} - S_{inter} unionarea=SA+SB−Sinter
此时的交并集IoU:
I o U = S i n t e r u n i o n a r e a = S i n t e r S A + S B − S i n t e r IoU = \frac{S_{inter}}{union_area} = \frac{S_{inter}}{S_{A} + S_{B} - S_{inter}} IoU=unionareaSinter=SA+SB−SinterSinter
示例:【黄色区域就是交集面积】
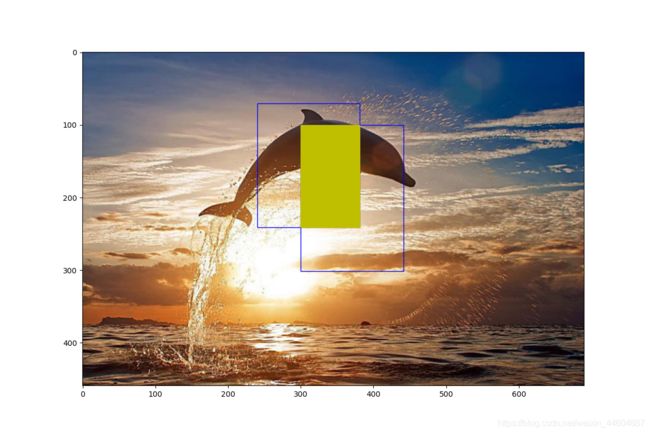
下面,我们通过代码来进行IoU计算和交集可视化绘制!
代码实践
0. 导入的基本库
import numpy as np # 可能用到的数据值计算库
import os # 可能用到的文件操作
import matplotlib.pyplot as plt # 图形绘制
import matplotlib.patches as patches # 添加矩形框
import matplotlib.image as image # 读取图像数据
1. Bounding box 表示
这里涉及使用bounding box的绘制来可视化交集,所以构建一个bounding box的数据格式函数——因为bounding box具有两种不同的数据表示,两种表示在最终计算上,步骤有所不同。
def BoundingBox_Denote(bbox=[], mode=True):
'''边界框的表示形式的转换
bbox: 包含(x1, y1, x2, y2)四个位置信息的数据格式
mode: 边界框数据表示的模式
True: to (x1,y1,x2,y2)
False: to (x,y,w,h)
return: 返回形式转换后的边界框数据
'''
denote_bbox = [] # 转换表示的边界框
if mode is True: # 保持原形式
denote_bbox = bbox
else: # 转换为(center_x, center_y, w, h)
center_x = (bbox[0]+bbox[2]) / 2.0
center_y = (bbox[1]+bbox[3]) / 2.0
w = bbox[2] - bbox[0]
h = bbox[3] - bbox[1]
denote_bbox = [center_x, center_y, w, h]
# 返回表示转换的边界框表示
denote_bbox = np.asarray(denote_bbox, dtype='float32')
return denote_bbox
2. 边界框矩形的绘制
这个部分用于边界框的绘制,展示交集的可视化
def draw_rectangle(bbox=[], mode=True, color='k', fill=False):
'''绘制矩形框
bbox:边界框数据(默认框数据不超过图片边界)
mode: 边界框数据表示的模式
True: to (x1,y1,x2,y2)
False: to (x,y,w,h)
color: 边框颜色
fill: 是否填充
'''
if mode is True: # to (x1,y1,x2,y2)
x = bbox[0]
y = bbox[1]
w = bbox[2] - bbox[0] + 1 # 考虑到实际长度由像素个数决定,因此加1(可按坐标轴上两点间的点数推导)
h = bbox[3] - bbox[1] + 1
else: # to (x,y,w,h)
# 默认绘制的框不超出边界
x = bbox[0] - bbox[2] / 2.0
y = bbox[1] - bbox[3] / 2.0
w = bbox[2]
h = bbox[3]
# 绘制边界框
# patches.Rectangle需要传入左上角坐标、矩形区域的宽度、高度等参数
# 获取绘制好的图形的返回句柄——用于添加到当前的图像窗口中
rect = patches.Rectangle((x, y), w, h,
linewidth=1, # 线条宽度
edgecolor=color, # 线条颜色
facecolor='y', #
fill=fill, linestyle='-')
return rect
3. 为xywh格式的bbox数据提供坐标变换
def bbox_2leftup_2rightdown(bbox):
'''计算bbox的左上右下顶点
bbox:框数据——xywh
'''
x1 = bbox[0] - bbox[2] / 2.0
y1 = bbox[1] - bbox[3] / 2.0
x2 = bbox[0] + bbox[2] / 2.0
y2 = bbox[1] + bbox[3] / 2.0
return x1, y1, x2, y2
4. IoU计算
这里完成IoU的计算,同时返回IoU计算过程中转换好数据格式的原始边界框与实际的交集区域bbox。
def box_iou_solve(bbox1, bbox2, mode=True):
'''计算两个框之间的IoU值
bbox1: 框数据
bbox2: 框数据
mode: 框数据表示形式
True: xyxy
False: xywh
IoU的intersection的左上右下顶点: 左上点为
return IoU, (r_bbox1, r_bbox2, inter_bbox)
PS:
IoU: 交并比值
r_bbox1:转换为xyxy形式的bbox1
r_bbox2:转换为xyxy形式的r_bbox2
inter_bbox: 形式为xyxy的交集位置
'''
if mode is True: # bbox数据格式: xyxy
# 左上右下顶点坐标
b1_x1, b1_y1, b1_x2, b1_y2 = bbox1[0], bbox1[1], bbox1[2], bbox1[3]
b2_x1, b2_y1, b2_x2, b2_y2 = bbox2[0], bbox2[1], bbox2[2], bbox2[3]
# 框的长宽:长度由具体的像素个数决定,因此需要加1
b1_w, b1_h = bbox1[2] - bbox1[0] + 1.0, bbox1[3] - bbox1[1] + 1.0
b2_w, b2_h = bbox2[2] - bbox2[0] + 1.0, bbox1[3] - bbox1[1] + 1.0
else: # bbox数据格式: xywh
# 左上右下顶点坐标
b1_x1, b1_y1, b1_x2, b1_y2 = bbox_2leftup_2rightdown(bbox1)
b2_x1, b2_y1, b2_x2, b2_y2 = bbox_2leftup_2rightdown(bbox2)
# 框的长宽
b1_w, b1_h = bbox1[2], bbox1[3]
b2_w, b2_h = bbox2[2], bbox2[3]
# 各自的面积
s1 = b1_w * b1_h
s2 = b2_w * b2_h
# 交集面积
# 如果考虑多个框进行计算交集——那么应该使用np.maximum——进行逐位比较
inter_x1 = max(b1_x1, b2_x1) # 交集区域的左上角
inter_y1 = max(b1_y1, b2_y1)
inter_x2 = min(b1_x2, b2_x2) # 交集区域的右下角
inter_y2 = min(b1_y2, b2_y2)
# 长度由具体的像素个数决定,因此需要加1
inter_w = max(inter_x2 - inter_x1 + 1.0, 0)
inter_h = max(inter_y2 - inter_y1 + 1.0, 0)
intersection = inter_w * inter_h
# 并集面积
union_area = s1 + s2 - intersection
# 计算IoU交并集
IoU = intersection / union_area
# 整合坐标信息——用于展示交集可视化
# 返回数据均以xyxy表示
r_bbox1 = b1_x1, b1_y1, b1_x2, b1_y2
r_bbox2 = b2_x1, b2_y1, b2_x2, b2_y2
inter_bbox = inter_x1, inter_y1, inter_x2, inter_y2
return IoU, (r_bbox1, r_bbox2, inter_bbox)
5. 演示代码
fig = plt.figure(figsize=(12, 8))
ax = plt.gca()
# 图片路径
img_path = os.path.join(os.getcwd(), 'img', '1.jpg')
img = image.imread(img_path) # 读取图片数据
plt.imshow(img) # 展示图片
bbox1 = [240, 70, 380, 240]
bbox2 = [300, 100, 440, 300]
denote_mode = True # 数据格式模式
denote_bbox1 = BoundingBox_Denote(bbox=bbox1, mode=denote_mode) # 形式转换
denote_bbox2 = BoundingBox_Denote(bbox=bbox2, mode=denote_mode)
iou, bboxs = box_iou_solve(bbox1, bbox2, mode=denote_mode) # 计算IoU交并比
# 取出IoU转换解析后的bbox数据
r_bbox1 = bboxs[0]
r_bbox2 = bboxs[1]
inter_bbox = bboxs[2]
# 利用数据进行绘制矩形框
# mode=True: bbox数据应该输入_xyxy
rect1 = draw_rectangle(r_bbox1, mode=True, color='b')
rect2 = draw_rectangle(r_bbox2, mode=True, color='b')
rect3 = draw_rectangle(inter_bbox, mode=True, color='y', fill=True)
ax.add_patch(rect1) # 将绘制的矩形添加到图片上
ax.add_patch(rect2)
ax.add_patch(rect3)
plt.show()
结果图片

相关链接(持续更新)
目标检测(一)——边界框总结与代码实现(可完整实现)
目标检测(二)——锚框总结与代码实现(可完整实现)