用python进行OpenCV进行图像旋转
1 旋转
1.1 旋转基本操作
旋转的概念正如我们平常听见的一样:将图片选装x度。我们先通过多少度来旋转图片,然后我们将写一个旋转函数。
import numpy as np #1
import argparse #2
import imutils #3
import cv2 #4
ap = argparse.ArgumentParser() #5
ap.add_argument("-i", "--image", required = True,
help = "Path to the image") #6
args = vars(ap.parse_args()) #7
image = cv2.imread(args["image"]) #8
cv2.imshow("Original", image) #9
(h, w) = image.shape[:2] #10
center = (w // 2, h // 2) #11
M = cv2.getRotationMatrix2D(center, 45, 1.0) #12
rotated = cv2.warpAffine(image, M, (w, h)) #13
cv2.imshow("Rotated by 45 Degrees", rotated) #14
M = cv2.getRotationMatrix2D(center, -90, 1.0) #15
rotated = cv2.warpAffine(image, M, (w, h)) #16
cv2.imshow("Rotated by -90 Degrees", rotated) #17
rotated = imutils.rotate(image, 180) #18
cv2.imshow("Rotated by 180 Degrees", rotated) #19
cv2.waitKey(0) #20
#10-11:
在第10行中我们得到了图像的宽和高,然后我们通过”//”将它们除以2取整来得到旋转的中心。当然我们也可以不以中心为旋转中心,这里为了方便。
#12:
正如我们定义一个矩阵来移动图像一样,我们还需要定义一个矩阵来旋转图像,然而不同的是我们不是通过NumPy来构造矩阵的,而是通过:
cv2.getRotationMatrix2D()- 1
第一个参数:表示向以哪一点进行旋转?这里就是图像的中心
第二个参数:表示我们希望旋转的角度。这里为正45度,表示逆时针旋转45度
第三个参数:表示图像旋转后的大小,这里设为1表示大小与原图大小一致
#13-14:
通过cv2.warpAffine()方法,我们便可进行旋转图像的操作,第一个参数为原图,第二个参数为旋转矩阵,第三个参数为图像(宽,高)的元组,然后将旋转后的图像显示出来
#15-17:
采用同样的方法将图像逆时针旋转90度,然后展示出来
#18-20:
在第18行我们使用了:imutils这个自己写的库,然后调用了rotate()方法。第一个参数是需要操作的图像,第二个参数是要旋转的度数。
1.2 自写的函数库
在imutils.py中我们自定义rotate函数
def rotate(image, angle, center=None, scale=1.0): #1
(h, w) = image.shape[:2] #2
if center is None: #3
center = (w // 2, h // 2) #4
M = cv2.getRotationMatrix2D(center, angle, scale) #5
rotated = cv2.warpAffine(image, M, (w, h)) #6
return rotated #7#1-4:
我们的旋转方法又四个参数,第一个是图像,第二个是我们所希望旋转的角度,我们还提供了两个可选择的变量:中心点和规模。中心点是我们希望我们的图像围绕哪一点旋转?如果,没有给它赋值,我们会默认将图像的中心点赋值给它。规模大小我们默认为1.0,表示没有任何大小的变化。
#5-7:
通过构造我们的旋转矩阵,然后我们将旋转后的结果返回。
2 效果展示
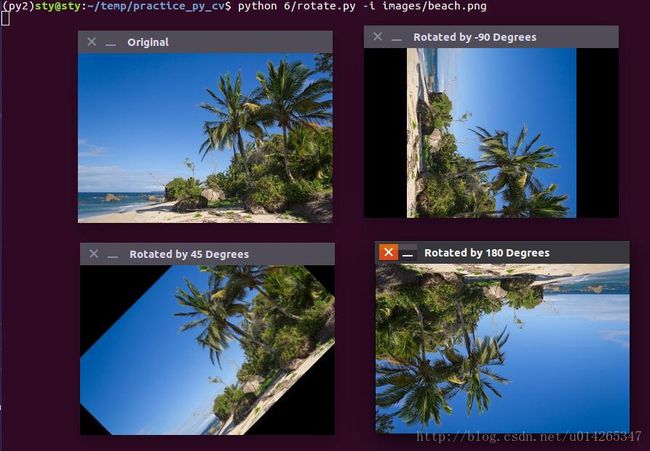
效果不好 更新了一个新的代码 整个图片旋转 不会固定原大小
import cv2
import numpy as np
def rotate_bound(image, angle):
# grab the dimensions of the image and then determine the
# center
(h, w) = image.shape[:2]
(cX, cY) = (w // 2, h // 2)
# grab the rotation matrix (applying the negative of the
# angle to rotate clockwise), then grab the sine and cosine
# (i.e., the rotation components of the matrix)
M = cv2.getRotationMatrix2D((cX, cY), -angle, 1.0)
cos = np.abs(M[0, 0])
sin = np.abs(M[0, 1])
# compute the new bounding dimensions of the image
nW = int((h * sin) + (w * cos))
nH = int((h * cos) + (w * sin))
# adjust the rotation matrix to take into account translation
M[0, 2] += (nW / 2) - cX
M[1, 2] += (nH / 2) - cY
# perform the actual rotation and return the image
return cv2.warpAffine(image, M, (nW, nH))
image=cv2.imread('./img/fin.png')
angle=90
imag=rotate_bound(image,angle)
cv2.imshow('ww',imag)
cv2.waitKey()