吴恩达机器学习第四章【Linear Regression with Multiple Variables】
吴恩达机器学习第四章【Linear Regression with Multiple Variables】
文章目录
- 吴恩达机器学习第四章【Linear Regression with Multiple Variables】
-
- Multiple Features【多维特征】
- Gradient Descent for Multiple Variables【多变量梯度下降】
- Gradient Descent in Practice I - Feature Scaling【梯度下降法实践1-特征缩放】
- Gradient Descent in Practice II - Learning Rate【梯度下降法实践2-学习率】
- Features and Polynomial Regression【特征和多项式回归】
- Normal Equation【正规方程】
Multiple Features【多维特征】
单变量线性回归方程的表达式为 h θ ( x ) = θ 0 + θ 1 x h_\theta(x)=\theta_0+\theta_1x hθ(x)=θ0+θ1x
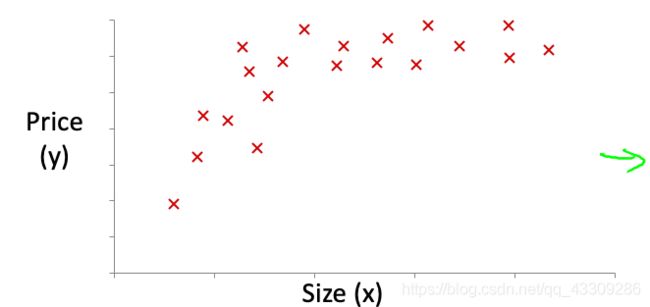
但现实生活中往往预测值不止受一个变量的影响,由此我们探讨多元线性回归。
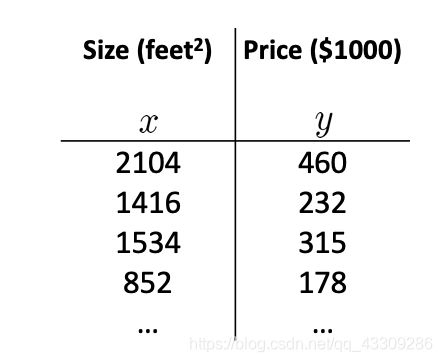
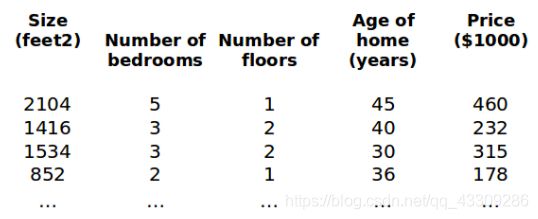
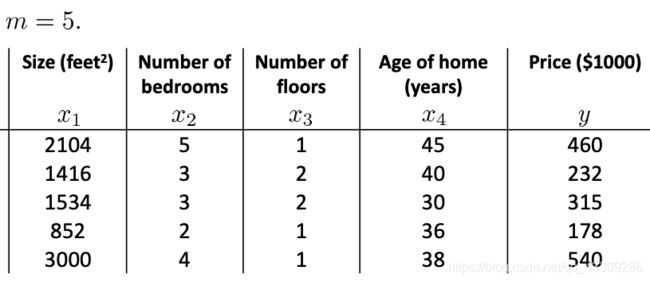
现在我们对房价模型增加更多的特征,例如房间数楼层等,构成一个含有多个变量的模型,模型中的特征为 ( x 1 , x 2 , . . . , x n ) \left( {x_{1}},{x_{2}},...,{x_{n}} \right) (x1,x2,...,xn)。
n n n 代表特征的数量
x ( i ) {x^{\left( i \right)}} x(i)代表第 i i i 个训练实例,是特征矩阵中的第 i i i行,是一个向量(vector)。
x j ( i ) {x}_{j}^{\left( i \right)} xj(i)代表特征矩阵中第 i i i 行的第 j j j 个特征,也就是第 i i i 个训练实例的第 j j j 个特征。
比方说,上图的
x ( 2 ) = [ 1416 3 2 40 ] {x}^{(2)}\text{=}\begin{bmatrix} 1416\\\ 3\\\ 2\\\ 40 \end{bmatrix} x(2)=⎣⎢⎢⎡1416 3 2 40⎦⎥⎥⎤
x 2 ( 2 ) = 3 , x 3 ( 2 ) = 2 x_{2}^{\left( 2 \right)}=3,x_{3}^{\left( 2 \right)}=2 x2(2)=3,x3(2)=2
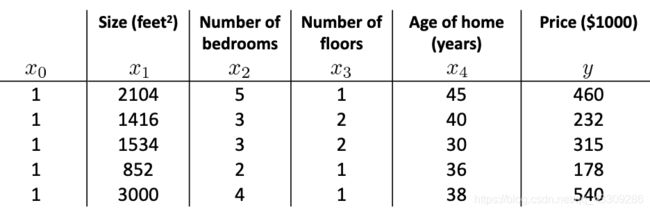
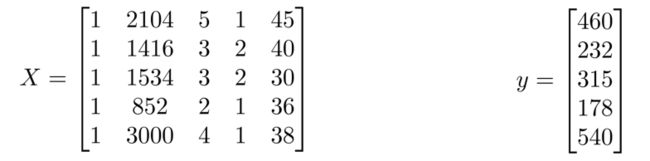
支持多变量的假设 h h h 表示为: h θ ( x ) = θ 0 + θ 1 x 1 + θ 2 x 2 + . . . + θ n x n h_{\theta}\left( x \right)={\theta_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}}+...+{\theta_{n}}{x_{n}} hθ(x)=θ0+θ1x1+θ2x2+...+θnxn,这个公式中有 n + 1 n+1 n+1个参数和 n n n个变量,为了使得公式能够简化一些,引入 x 0 = 1 x_{0}=1 x0=1,则公式转化为: h θ ( x ) = θ 0 x 0 + θ 1 x 1 + θ 2 x 2 + . . . + θ n x n h_{\theta} \left( x \right)={\theta_{0}}{x_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}}+...+{\theta_{n}}{x_{n}} hθ(x)=θ0x0+θ1x1+θ2x2+...+θnxn,其中令* θ = [ θ 0 θ 1 θ 2 . . . θ n ] \theta=\begin{bmatrix}{\theta_0}&{\theta_1}&{\theta_2}&{...}&{\theta_n}\end{bmatrix} θ=[θ0θ1θ2...θn]、 X = [ x 0 x 1 x 2 . . . x n ] X=\begin{bmatrix}{x_0}&{x_1}&{x_2}&{...}&{x_n}\end{bmatrix} X=[x0x1x2...xn]*( x 0 = 1 x_0=1 x0=1),此时模型中的参数是一个 n + 1 n+1 n+1维的向量,任何一个训练实例也都是 n + 1 n+1 n+1维的向量,特征矩阵 X X X的维度是 m ∗ ( n + 1 ) m*(n+1) m∗(n+1)。 因此公式可以简化为: h θ ( x ) = θ T X h_{\theta} \left( x \right)={\theta^{T}}X hθ(x)=θTX,其中上标 T T T代表矩阵转置。
Gradient Descent for Multiple Variables【多变量梯度下降】
在单变量线性回归中 J ( θ 0 , θ 1 ) = 1 2 m ∑ i = 0 m ( h θ ( x ) − y ( i ) ) 2 J(\theta_0,\theta_1)=\frac{1}{2m}\sum_{i=0}^{m}(h_\theta(x)-y^{(i)})^2 J(θ0,θ1)=2m1∑i=0m(hθ(x)−y(i))2
在多变量线性回归中,我们也构建一个代价函数,则这个代价函数是所有建模误差的平方和,即: J ( θ 0 , θ 1 . . . θ n ) = 1 2 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 2 J\left( {\theta_{0}},{\theta_{1}}...{\theta_{n}} \right)=\frac{1}{2m}\sum\limits_{i=1}^{m}{ { {\left( h_{\theta} \left({x}^{\left( i \right)} \right)-{y}^{\left( i \right)} \right)}^{2}}} J(θ0,θ1...θn)=2m1i=1∑m(hθ(x(i))−y(i))2 ,
其中: h θ ( x ) = θ T X = θ 0 + θ 1 x 1 + θ 2 x 2 + . . . + θ n x n h_{\theta}\left( x \right)=\theta^{T}X={\theta_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}}+...+{\theta_{n}}{x_{n}} hθ(x)=θTX=θ0+θ1x1+θ2x2+...+θnxn ,因为* θ = [ θ 0 θ 1 θ 2 . . . θ n ] \theta=\begin{bmatrix}{\theta_0}&{\theta_1}&{\theta_2}&{...}&{\theta_n}\end{bmatrix} θ=[θ0θ1θ2...θn]*所以可以视
cost function:
J ( θ ) = 1 2 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 2 J\left( {\theta}\right)=\frac{1}{2m}\sum\limits_{i=1}^{m}{ { {\left( h_{\theta} \left({x}^{\left( i \right)} \right)-{y}^{\left( i \right)} \right)}^{2}}} J(θ)=2m1i=1∑m(hθ(x(i))−y(i))2 ,
gradient descent:
Repeat{
θ j : = θ j − α ∂ ∂ θ j J ( θ ) \theta_j:=\theta_j-\alpha\frac{\partial}{\partial\theta_j}J(\theta) θj:=θj−α∂θj∂J(θ)
}
即:
Repeat{
θ j : = θ j − α ∂ ∂ θ j 1 2 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 2 \theta_j:=\theta_j-\alpha\frac{\partial}{\partial\theta_j}\frac{1}{2m}\sum\limits_{i=1}^{m}{ { {\left( h_{\theta} \left({x}^{\left( i \right)} \right)-{y}^{\left( i \right)} \right)}^{2}}} θj:=θj−α∂θj∂2m1i=1∑m(hθ(x(i))−y(i))2
}
求导数后得到:
Repeat{
θ j : = θ j − α ∂ ∂ θ j 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) ⋅ x j ( i ) \theta_j:=\theta_j-\alpha\frac{\partial}{\partial\theta_j}\frac{1}{m}\sum\limits_{i=1}^{m}{ { {\left( h_{\theta} \left({x}^{\left( i \right)} \right)-{y}^{\left( i \right)} \right)}·x_j^{(i)}}} θj:=θj−α∂θj∂m1i=1∑m(hθ(x(i))−y(i))⋅xj(i)
(simultaneously update θ j \theta_j θj ,for j=0,1,…,n)
}
我们的目标和单变量线性回归问题中一样,是要找出使得代价函数最小的一系列参数。
当 n > = 1 n>=1 n>=1时,
θ 0 : = θ 0 − a 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) x 0 ( i ) { {\theta }_{0}}:={ {\theta }_{0}}-a\frac{1}{m}\sum\limits_{i=1}^{m}{({ {h}_{\theta }}({ {x}^{(i)}})-{ {y}^{(i)}})}x_{0}^{(i)} θ0:=θ0−am1i=1∑m(hθ(x(i))−y(i))x0(i)
θ 1 : = θ 1 − a 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) x 1 ( i ) { {\theta }_{1}}:={ {\theta }_{1}}-a\frac{1}{m}\sum\limits_{i=1}^{m}{({ {h}_{\theta }}({ {x}^{(i)}})-{ {y}^{(i)}})}x_{1}^{(i)} θ1:=θ1−am1i=1∑m(hθ(x(i))−y(i))x1(i)
θ 2 : = θ 2 − a 1 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) x 2 ( i ) { {\theta }_{2}}:={ {\theta }_{2}}-a\frac{1}{m}\sum\limits_{i=1}^{m}{({ {h}_{\theta }}({ {x}^{(i)}})-{ {y}^{(i)}})}x_{2}^{(i)} θ2:=θ2−am1i=1∑m(hθ(x(i))−y(i))x2(i)
…
Python 代码:
def computeCost(X, y, theta):
inner = np.power(((X * theta.T) - y), 2)
return np.sum(inner) / (2 * len(X))
Gradient Descent in Practice I - Feature Scaling【梯度下降法实践1-特征缩放】
当等高线过于扁时,梯度下降算法需要非常多次的迭代才能收敛。
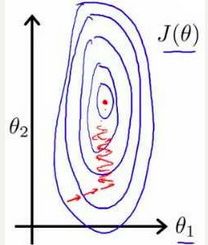
解决的方法是尝试将所有特征的尺度都尽量缩放到-1到1之间,其中最简单的方法是令: x n = x n − μ n s n { {x}_{n}}=\frac{ { {x}_{n}}-{ {\mu}_{n}}}{ { {s}_{n}}} xn=snxn−μn,其中 μ n {\mu_{n}} μn是训练集的平均值, s n {s_{n}} sn是极差或标准差。
例:房屋的尺寸和房间的数量,尺寸的值为 0-2000平方英尺,平均尺寸为1000平方英尺,而房间数量的值则是0-5,平均数目为2个,以两个参数分别为横纵坐标,绘制代价函数的等高线图能,看出图像会显得很扁
其中可得:
x 1 = s i z e − 1000 2000 x_1=\frac{size-1000}{2000} x1=2000size−1000
x 2 = n u m b e r o f b e d r o o m − 2 5 x_2=\frac{number\ of\ bedroom -2}{5} x2=5number of bedroom−2
Gradient Descent in Practice II - Learning Rate【梯度下降法实践2-学习率】
梯度下降算法收敛所需要的迭代次数根据模型的不同而不同,我们不能提前预知,但我们可以绘制迭代次数和代价函数的图表来观测算法在何时趋于收敛。
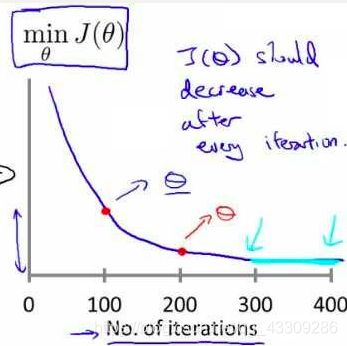
梯度下降算法的每次迭代受到学习率的影响,如果学习率 a a a过小,则达到收敛所需的迭代次数会非常高;如果学习率 a a a过大,每次迭代可能不会减小代价函数,可能会越过局部最小值导致无法收敛。
通常可以考虑尝试些学习率:
α = 0.01 , 0.03 , 0.1 , 0.3 , 1 , 3 , 10 \alpha=0.01,0.03,0.1,0.3,1,3,10 α=0.01,0.03,0.1,0.3,1,3,10
Features and Polynomial Regression【特征和多项式回归】
以房价预测为例,假设房价与临街宽度、纵向深度和占地面积有关,且训练集为下图:

x 1 = f r o n t a g e {x_{1}}=frontage x1=frontage(临街宽度), x 2 = d e p t h {x_{2}}=depth x2=depth(纵向深度), x = f r o n t a g e ∗ d e p t h = a r e a x=frontage*depth=area x=frontage∗depth=area(面积),则: h θ ( x ) = θ 0 + θ 1 x {h_{\theta}}\left( x \right)={\theta_{0}}+{\theta_{1}}x hθ(x)=θ0+θ1x。
则可知可能存在二次方模型: h θ ( x ) = θ 0 + θ 1 x 1 + θ 2 x 2 2 h_{\theta}\left( x \right)={\theta_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}^2} hθ(x)=θ0+θ1x1+θ2x22
或者三次方模型: h θ ( x ) = θ 0 + θ 1 x 1 + θ 2 x 2 2 + θ 3 x 3 3 h_{\theta}\left( x \right)={\theta_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}^2}+{\theta_{3}}{x_{3}^3} hθ(x)=θ0+θ1x1+θ2x22+θ3x33
可知不是线性方程,所以我们可以令: x 2 = x 2 2 , x 3 = x 3 3 { {x}_{2}}=x_{2}^{2},{ {x}_{3}}=x_{3}^{3} x2=x22,x3=x33,从而将模型转化为线性回归模型。
Normal Equation【正规方程】
在计算代价函数 J ( θ ) J(\theta) J(θ)时,我们可以使用线性回归方程进行迭代计算,同时我们也进行一次性计算。
易知导数等于0时,代价函数最小。
我们用正规方程计算。正规方程是通过求解下面的方程来找出使得代价函数最小的参数的: ∂ ∂ θ j J ( θ j ) = 0 \frac{\partial}{\partial{\theta_{j}}}J\left( {\theta_{j}} \right)=0 ∂θj∂J(θj)=0
假设我们的训练集特征矩阵为 X X X(包含了 x 0 = 1 { {x}_{0}}=1 x0=1)并且我们的训练集结果为向量 y y y,则利用正规方程解出向量 θ = ( X T X ) − 1 X T y \theta ={ {\left( {X^T}X \right)}^{-1}}{X^{T}}y θ=(XTX)−1XTy 。
上标T代表矩阵转置,上标-1 代表矩阵的逆。
其中:
X = [ 1 x 1 ( 1 ) x 1 ( 2 ) x 1 ( 3 ) ⋯ x 1 ( m ) 1 x 2 ( 1 ) x 2 ( 2 ) x 2 ( 3 ) ⋯ x 2 ( m ) 1 x 3 ( 1 ) x 3 ( 2 ) x 3 ( 3 ) ⋯ x 3 ( m ) 1 ⋮ ⋮ ⋮ ⋱ ⋮ 1 x n ( 1 ) x n ( 2 ) x n ( 3 ) ⋯ x n ( m ) ] X=\begin{bmatrix}{1}&{x_{1}^{(1)}}&{x_{1}^{(2)}}&{x_{1}^{(3)}}&{\cdots}&{ {x_{1}^{(m)}}}\\{1}&{x_{2}^{(1)}}&{x_{2}^{(2)}}&{x_{2}^{(3)}}&{\cdots}&{ {x_{2}^{(m)}}}\\{1}&{x_{3}^{(1)}}&{x_{3}^{(2)}}&{x_{3}^{(3)}}&{\cdots}&{ {x_{3}^{(m)}}}\\{1}&{\vdots}&{\vdots}&{\vdots}&{\ddots}&{ {\vdots}}\\{1}&{x_{n}^{(1)}}&{x_{n}^{(2)}}&{x_{n}^{(3)}}&{\cdots}&{ {x_{n}^{(m)}}}\end{bmatrix} X=⎣⎢⎢⎢⎢⎢⎢⎡11111x1(1)x2(1)x3(1)⋮xn(1)x1(2)x2(2)x3(2)⋮xn(2)x1(3)x2(3)x3(3)⋮xn(3)⋯⋯⋯⋱⋯x1(m)x2(m)x3(m)⋮xn(m)⎦⎥⎥⎥⎥⎥⎥⎤
y = [ y 1 y 2 y 3 ⋮ y n ] y=\begin{bmatrix}{y_1}\\{y_2}\\{y_3}\\{\vdots}\\{y_n}\\\end{bmatrix} y=⎣⎢⎢⎢⎢⎢⎡y1y2y3⋮yn⎦⎥⎥⎥⎥⎥⎤
正规方程:
θ = ( X ( T ) X ) − 1 X T y \theta=({X^{(T)}X})^{-1}X^{T}y θ=(X(T)X)−1XTy
正规方程 θ = ( X T X ) − 1 X T y \theta ={ {\left( {X^{T}}X \right)}^{-1}}{X^{T}}y θ=(XTX)−1XTy 的推导过程:
J ( θ ) = 1 2 m ∑ i = 1 m ( h θ ( x ( i ) ) − y ( i ) ) 2 J\left( \theta \right)=\frac{1}{2m}\sum\limits_{i=1}^{m}{ { {\left( {h_{\theta}}\left( {x^{(i)}} \right)-{y^{(i)}} \right)}^{2}}} J(θ)=2m1i=1∑m(hθ(x(i))−y(i))2
其中: h θ ( x ) = θ T X = θ 0 x 0 + θ 1 x 1 + θ 2 x 2 + . . . + θ n x n {h_{\theta}}\left( x \right)={\theta^{T}}X={\theta_{0}}{x_{0}}+{\theta_{1}}{x_{1}}+{\theta_{2}}{x_{2}}+...+{\theta_{n}}{x_{n}} hθ(x)=θTX=θ0x0+θ1x1+θ2x2+...+θnxn
将向量表达形式转为矩阵表达形式,则有 J ( θ ) = 1 2 ( X θ − y ) 2 J(\theta )=\frac{1}{2}{ {\left( X\theta -y\right)}^{2}} J(θ)=21(Xθ−y)2 ,其中 X X X为 m m m行 n n n列的矩阵( m m m为样本个数, n n n为特征个数), θ \theta θ为 n n n行1列的矩阵, y y y为 m m m行1列的矩阵,对 J ( θ ) J(\theta ) J(θ)进行如下变换
J ( θ ) = 1 2 ( X θ − y ) T ( X θ − y ) J(\theta )=\frac{1}{2}{ {\left( X\theta -y\right)}^{T}}\left( X\theta -y \right) J(θ)=21(Xθ−y)T(Xθ−y)
= 1 2 ( θ T X T − y T ) ( X θ − y ) =\frac{1}{2}\left( { {\theta }^{T}}{ {X}^{T}}-{ {y}^{T}} \right)\left(X\theta -y \right) =21(θTXT−yT)(Xθ−y)
= 1 2 ( θ T X T X θ − θ T X T y − y T X θ − y T y ) =\frac{1}{2}\left( { {\theta }^{T}}{ {X}^{T}}X\theta -{ {\theta}^{T}}{ {X}^{T}}y-{ {y}^{T}}X\theta -{ {y}^{T}}y \right) =21(θTXTXθ−θTXTy−yTXθ−yTy)
接下来对 J ( θ ) J(\theta ) J(θ)偏导,需要用到以下几个矩阵的求导法则:
d A B d B = A T \frac{dAB}{dB}={ {A}^{T}} dBdAB=AT
d X T A X d X = 2 A X \frac{d{ {X}^{T}}AX}{dX}=2AX dXdXTAX=2AX
所以有:
∂ J ( θ ) ∂ θ = 1 2 ( 2 X T X θ − X T y − ( y T X ) T − 0 ) \frac{\partial J\left( \theta \right)}{\partial \theta }=\frac{1}{2}\left(2{ {X}^{T}}X\theta -{ {X}^{T}}y -{}({ {y}^{T}}X )^{T}-0 \right) ∂θ∂J(θ)=21(2XTXθ−XTy−(yTX)T−0)
= 1 2 ( 2 X T X θ − X T y − X T y − 0 ) =\frac{1}{2}\left(2{ {X}^{T}}X\theta -{ {X}^{T}}y -{ {X}^{T}}y -0 \right) =21(2XTXθ−XTy−XTy−0)
= X T X θ − X T y ={ {X}^{T}}X\theta -{ {X}^{T}}y =XTXθ−XTy
令 ∂ J ( θ ) ∂ θ = 0 \frac{\partial J\left( \theta \right)}{\partial \theta }=0 ∂θ∂J(θ)=0,
则有 θ = ( X T X ) − 1 X T y \theta ={ {\left( {X^{T}}X \right)}^{-1}}{X^{T}}y θ=(XTX)−1XTy
对于那些不可逆矩阵,正规方程是不可以用的。
梯度下降与正规方程的比较:
| 梯度下降 | 正规方程 |
|---|---|
| 需要选择学习率 α \alpha α | 不需要 |
| 需要多次迭代 | 一次运算得出 |
| 当特征数量 n n n大时也能较好适用 | 需要计算 ( X T X ) − 1 { {\left( { {X}^{T}}X \right)}^{-1}} (XTX)−1 如果特征数量n较大则运算代价大,因为矩阵逆的计算时间复杂度为 O ( n 3 ) O\left( { {n}^{3}} \right) O(n3),通常来说当 n n n小于10000 时还是可以接受的 |
| 适用于各种类型的模型 | 只适用于线性模型,不适合逻辑回归模型等其他模型 |
正规方程的python实现:
import numpy as np
def normalEqn(X, y):
theta = np.linalg.inv(X.T@X)@X.T@y #X.T@X等价于X.T.dot(X)
return theta