用CubeMX开发HAL学习记录(二)——串口通讯基础知识
串口通讯——基础知识
- 前言
- 一、通讯协议
-
- 1.并行通讯
- 2.串行通讯
-
- 同步串行通讯
- 异步串行通讯
- 3.通讯传输方向
- 二、STM32的串口通讯
-
- 1.串口收发单元
- 2.串口转TTL串口模块
- 三、HAL库外设初始化设置
-
- 1.串口的数据类型定义
-
- ①外设句柄
- ②串口初始化
- 2.串口的设置一般步骤
- 总结
前言
因为在最近有一个比赛要用到openMV和STM32F407的通讯,所以这几天一直在学通讯方式,因为学校还没有开设51的课程,我是直接越过了51直接学STM的很多单片机知识有所缺失,如果有专业错误还请指正,所以学起来真的是异常的艰难,这篇文章把这几天的学习结果进行一个总结。
一、通讯协议
所谓通讯就是将两个设备进行连接,然后通过某种方式进行信息交换。而按照数据传输方式的不同,又可以分为串行通讯和并行通讯两类。串行通讯是将数据逐位进行传输,而并行是将多位数据同时传输。
1.并行通讯
并行通讯如下图所示,并行一次性将8位数据一起传输给接收设备,这样一趟就可以传输8个数据,当然这样的优缺点也十分的明显,如:多位数据同时传输,传输控制简单,传输速度快,但是占用的引脚资源较多,所以在单片机同时控制多个外设的时候,引脚资源十分的缺乏,并行通讯显然不是一个很好的选择。

2.串行通讯
并行通讯如下图所示,串行通讯一次只传送一位数据给接收设备,显而易见串行通讯占用的引脚资源少,但同时牺牲了传输速率。在引脚资源匮乏的情况下这显然是大多数外设设备的最佳选择。同时串行通信按照其不同的数据同步方式,分为同步和异步两种方式。

同步串行通讯
数据传输以数据块或一组字符为单位,在一个数据块内,字符与字符无间隔,收发双方依靠独立的时钟线进行信号的同步。适用于大批量的数据传输。

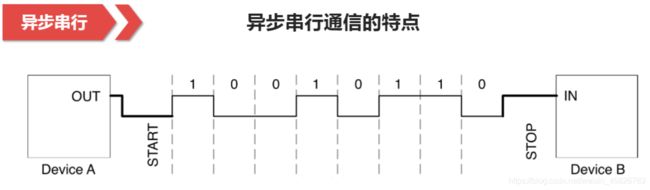
异步串行通讯
数据传输以单个字符为单位,字符和字符之间的间隙任意,字符内部每一位持续的时间相同。收发双方没有专门的时钟信号,而通过依靠事先约定的字符格式和通信速率(也叫波特率)来完成通信。
异步串行通信一般来说有一个约定的字符格式(决定字符中数据的传输形式),字符格式由起始位,数据位,校验位,停止位组成。而通常我们大多数情况下设置1位起始位,8位数据位,无奇偶校验和1位停止位。
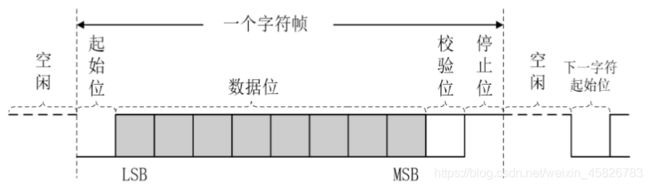
波特率(决定字符中每一位数据的持续时间):表示每秒传送二进制数码的位数,以bit/s(或bps)为单位。
常用波特率为9600、19200、38400、57600、112500;
注意:波特率为同一个设备共同约定的一个传输速率,所以接收设备和发送设备的波特率应设置为同一个值。

假设:接收端的采样时钟为波特率的16倍(接收本质:数据采集)
数据接收过程(如上所示):
1、接收过程由起始位的下降沿启动
2、接收端等待8个时钟周期,以便建立一个接近比特率周期中间的采样点
3、接收端等待16个时钟周期,使其进入第一个数据位周期的中点
4、第一个数据位被采样并储存在接收寄存器中
5、串口模块在采样第二个数据位之前等待另外16个时钟周期
6、重复此过程,直到所有数据为都被采样和储存
7、由停止位和上升沿使数据线返回到空闲状态。
3.通讯传输方向
通讯传输主要由三种模式分别为单工,半双工和全双工

单工:传输仅能沿着一个方向,不能实现反向传输,只有一条通信线路
半双工:传输可以沿着两个方向,但不能同时接收或者发送,只能分时进行,同样只有一条通信线路。
全双工:数据可以同时进行双向传输,具有两条通信线路。(通常用的UART即串口就是全双工)
二、STM32的串口通讯
1.串口收发单元
串口收发单元主要利用数据寄存器DR,发送引脚TX,接收引脚RX,以及三个通信状态位TXE、TC和RXNE来完成数据的接收和发送。其工作分布图如下所示。
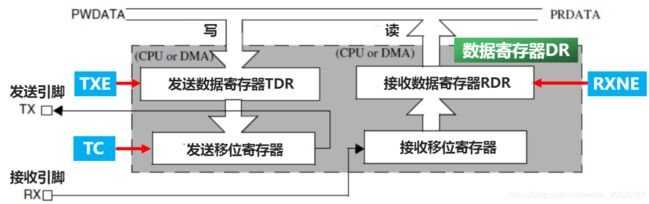
数据寄存器DR在硬件上分为TDR和RDR两个寄存器,通过数据的流向进行区分,在结构设计上采用了双缓冲结构;
发送时,数据通过数据总线送入TDR寄存器,然后传送到发送移位寄存器完成数据转换,从并行数据转为串行数据,最后通过TX引脚发送
接收时,数据通过RX引脚逐位送入接收移位寄存器,8位数据接收完成后,送入RDR寄存器,供用户读取。
这种方法可以在数据收发的过程中,同时写入新的数据或读取已接受的数据,提高数据的传输效率。
通信状态标志位
| 标志位 | 含义 |
|---|---|
| TXE | 数据寄存器空标志。当TDR寄存器的内容已经传送到发送移位寄存器时,该位由硬件置1。如果串口控制寄存器CR1中的TXEIE为1,将会触发发送数据寄存器空中断。注:当TXE置1时,数据还有可能在发送。 |
| TC | 发送完成标志。当发送移位寄存器的内容发送完成,同时TDR寄存器也为空时,该为由硬件置1,表示本次数据传输已经完成。如果串口控制寄存器CR1中的TCIE位为1,将会触发发送完成中断。注:当TC置1时,数据才是真正地发送完成。 |
| RXNE | 接收数据寄存器不为空标志。当移位寄存器的内容已经传送到接收数据寄存器RDR时,该位由硬件置1.如果串口控制寄存器CR1中的RXNEIE位为1,将会触发接收寄存器不为空中断。 |
在轮询方式下,可以直接检测标志位;
在中断方式下,需要在中断服务程序中通过检测不同的中断标志位,来判断中断类型,然后执行后续的任务处理。
2.串口转TTL串口模块

一般而言,我们要将电脑和单片机连接,其主要的方式就是利用USB口和单片机的MCU进行一个串口通讯。而电脑时USB口的所以我们需要一个USB转TTL模块才能将MCU和电脑用USB进行连接。
一般来说我们买过来的单片机是已经具备USB转TTL功能的了。而USB转TTL模块中最重要的就是中间那块名为CH340或CH341的芯片了,我们只有在电脑上安装对应的驱动程序我们才能让电脑顺利的读取到MCU传来的电平信号在。在连接上单片机后,可以打开电脑的设备管理器(win+S搜索设备管理器即可),如果有COMx的虚拟串口则说明安装成功了。
在连接上,所有的串口通信都需要共地相接(为确保电平的一致),且TX引脚与对方的RX相接,RX引脚与对方的TX引脚相接。
三、HAL库外设初始化设置
1.串口的数据类型定义
①外设句柄
句柄(基本上我现在学过的外设都由)一般由五个部分组成(不同的外设设置方法也不尽相同,以下设置为串口的组成):
(1)Instance(外设实例)——>UART1/UART2。。。。。。
(2)Initialization(初始化配置参数)——>波特率/字符格式
(3)Status(外设状态)——>Ready/Busy/Error
(4)DMA通道句柄(DMA通道句柄)——>Linked to DMA channel
(5)I/O Buffer(I/O缓冲区)——>I/O buffer on address
CubeMX生成HAL库的串口句柄:
typedef struct __UART_HandleTypeDef
{
USART_TypeDef *Instance; /*!<串口寄存器基地址定义*/
UART_InitTypeDef Init; /*!<串口初始化数据类型*/
uint8_t *pTxBuffPtr; /*!<串口发送缓冲区首地址*/
uint16_t TxXferSize; /*!<串口待发送数据个数*/
__IO uint16_t TxXferCount; /*!<串口发送数据计数器*/
uint8_t *pRxBuffPtr; /*!<串口接收缓冲区首地址*/
uint16_t RxXferSize; /*!<串口待接收数据个数*/
__IO uint16_t RxXferCount; /*!<串口待接收数据计数器*/
DMA_HandleTypeDef *hdmatx; /*!<串口发送的DMA通道外设句柄定义 */
DMA_HandleTypeDef *hdmarx; /*!<串口接收的DMA通道定义*/
HAL_LockTypeDef Lock; /*!<保护锁类型定义*/
__IO HAL_UART_StateTypeDef gState; /*!<串口全局状态和发送状态信息*/
__IO HAL_UART_StateTypeDef RxState; /*!<串口接收状态信息*/
__IO uint32_t ErrorCode; /*!<串口错误代码*/
#if (USE_HAL_UART_REGISTER_CALLBACKS == 1)
void (* TxHalfCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Tx Half Complete Callback */
void (* TxCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Tx Complete Callback */
void (* RxHalfCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Rx Half Complete Callback */
void (* RxCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Rx Complete Callback */
void (* ErrorCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Error Callback */
void (* AbortCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Complete Callback */
void (* AbortTransmitCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Transmit Complete Callback */
void (* AbortReceiveCpltCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Abort Receive Complete Callback */
void (* WakeupCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Wakeup Callback */
void (* MspInitCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Msp Init callback */
void (* MspDeInitCallback)(struct __UART_HandleTypeDef *huart); /*!< UART Msp DeInit callback */
#endif /* USE_HAL_UART_REGISTER_CALLBACKS */
} UART_HandleTypeDef;
②串口初始化
在CubeMX生成的HAL库中可以在usart.c文件夹中找到UART_HandleTypeDef huart1;这样的定义。
然后,在void MX_USART1_UART_Init(void)这样的函数中就是对串口1的字符格式进行设置。这一步我们在使用CubeMX配置相关参数的时候就已经完成了,所以自动生成的代码也已经完成相关字符格式的配置,不再需要我们在代码中再次编写。
CubeMX生成HAL库的串口初始化结构体:
typedef struct
{
uint32_t BaudRate; /*!<设置通信波特率*/
uint32_t WordLength; /*!<设置通信字符中数据位的位数*/
uint32_t StopBits; /*!<设置通信字符中停止位的位数*/
uint32_t Parity; /*!<设置奇偶校验模式*/
uint32_t Mode; /*!<设置接收或发送模式是否使能或禁能*/
uint32_t HwFlowCtl; /*!<设置硬件流控是否使能或禁能*/
uint32_t OverSampling; /*!<设置采样频率和信号传输频率的比例*/
} UART_InitTypeDef;
| 结构体成员变量 | 取值范围 | 含义 |
|---|---|---|
| WordLength | UART_WORDLENGTH_8H | 数据位长度为8位 |
| ------ | UART_WORDLENGTH_8H | 数据位长度为9位 |
| StopBits | UART_STOPBITS_1 | 停止位长度为1位 |
| ------ | UART_STOPBITS_2 | 停止位长度为2位 |
| Parity | UART_PARITY_NONE | 无奇偶校验 |
| ------ | UART_PARITY_EVEN | 偶校验 |
| ------ | UART_PARITY_ODD | 奇校验 |
| Mode | UART_MODE_RX | 串口仅处于接收模式,只能接收数据,不能发送数据 |
| ------ | UART_MODE_TX | 串口仅处于发送模式,只能发送数据,不能接收数据 |
| ------ | UART_MODE_TX_RX | 串口处于接收和发送模式,可以同时收发数据 |
| HwFlowCtrl | UART_HWCONTROL_NONE | 无硬件流控 |
| ------ | UART_HWCONTROL_RTS | 使能“请求发送(RTS)”引脚 |
| ------ | UART_HWCONTROL_CTS | 使能“请求发送(CTS)”引脚 |
| ------ | UART_HWCONTROL_RTS_CTS | 使能“请求发送(RTS)”和“允许发送(CTS)”引脚 |
| OverSampling | UART_OVERSAMPLING_16 | 采样频率是信号传输频率的16倍 |
| ------ | UART_OVERSAMPLING_8 | 采样频率是信号传输频率的8倍。 |
硬件流控可以控制数据传输的进程,防止数据丢失,该功能主要在收发双方传输速度不匹配的时候使用。
2.串口的设置一般步骤
在CubeMX自动生成的HAL库代码中按照如下步骤配置引脚
HAL_UART_Init ( ) Start
{
将句柄结构中的初始化参数存入寄存器
HAL_UART_MspInit ( ) Start
{
完成时钟、引脚等初始化
}
HAL_UART_MspInit ( ) End
}
HAL_UART_Init ( ) End
而我们自己在CubeMX中自己写入的初始化参数将会通过 MX_USART1_UART_Init()写入寄存器,引脚初始化配置通过MX_GPIO_Init()写入寄存器。所以在主函数中要调用这两个函数进行初始化。但在CubeMX生成的代码中已经完成了调用,无需用户再完成。此配置可以在CubeMX生成的usart.c文件中找到串口设置。
以下贴出CubeMX生成的我对uart1的配置:
void MX_USART1_UART_Init(void)
{
huart1.Instance = USART1; //使用的串口为串口一
huart1.Init.BaudRate = 115200; //115200的波特率
huart1.Init.WordLength = UART_WORDLENGTH_8B; //8位停止位
huart1.Init.StopBits = UART_STOPBITS_1; //1位停止位
huart1.Init.Parity = UART_PARITY_NONE; //无奇偶校验
huart1.Init.Mode = UART_MODE_TX_RX; //同时使用接收和发送功能
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE; //无硬件流控
huart1.Init.OverSampling = UART_OVERSAMPLING_16; //采样频率是信号传输频率的16倍
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
}
void HAL_UART_MspInit(UART_HandleTypeDef* uartHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
if(uartHandle->Instance==USART1)
{
/* USER CODE BEGIN USART1_MspInit 0 */
/* USER CODE END USART1_MspInit 0 */
/* USART1 clock enable */
__HAL_RCC_USART1_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
/**USART1 GPIO Configuration
PA9 ------> USART1_TX
PA10 ------> USART1_RX
*/
GPIO_InitStruct.Pin = GPIO_PIN_9|GPIO_PIN_10; //USART1外设对应引脚为(GPIOA9和GPIOA10)
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; //开启串口复用
GPIO_InitStruct.Pull = GPIO_NOPULL; //无上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH; //采用高速时钟
GPIO_InitStruct.Alternate = GPIO_AF7_USART1; //GPIO复用为串口功能
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/* USART1 interrupt Init */
HAL_NVIC_SetPriority(USART1_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(USART1_IRQn);
/* USER CODE BEGIN USART1_MspInit 1 */
/* USER CODE END USART1_MspInit 1 */
}
}