差分 --算法竞赛专题解析(32)
本系列文章将于2021年整理出版。前驱教材:《算法竞赛入门到进阶》 清华大学出版社
网购:京东 当当 作者签名书:点我
有建议请加QQ 群:567554289
文章目录
- 1. 一维差分
-
- 1.1 一维差分的概念
- 1.2 差分的局限性
- 2. 二维差分
-
- 2.1 用差分数组的递推公式求前缀和
- 2.2 直接计算前缀和
- 3. 三维差分
- 4. 差分习题
差分是一种处理数据的巧妙而简单的方法,它应用于区间的修改和询问问题。把给定的数据元素集A分成很多区间,对这些区间做很多次操作,每次操作是对某个区间内的所有元素做相同的加减操作,若一个个地修改这个区间内的每个元素,非常耗时。引入“差分数组”D,当修改某个区间时,只需要修改这个区间的“端点”,就能记录整个区间的修改,而对端点的修改非常容易,是 O ( 1 ) O(1) O(1)复杂度的。当所有的修改操作结束后,再利用差分数组,计算出新的A。
数据A可以是一维的线性数组 a [ ] a[] a[]、二维矩阵 a [ ] [ ] a[][] a[][]、三维立体 a [ ] [ ] [ ] a[][][] a[][][]。相应地,定义差分数组 D [ ] 、 D [ ] [ ] 、 D [ ] [ ] [ ] D[]、D[][]、D[][][] D[]、D[][]、D[][][]。一维差分很容易理解,二维和三维需要一点想象力。
1. 一维差分
1.1 一维差分的概念
讨论这样一个场景:
(1)给定一个长度为n的一维数组 a [ ] a[] a[],数组内每个元素有初始值。
(2)修改操作:做m次区间修改,每次修改对区间内所有元素做相同的加减操作。例如第 i i i次修改,把区间 [ L i , R i ] [Li, Ri] [Li,Ri]内所有元素加上 d i di di。
(3)询问操作:询问一个元素的新值是多少。
如果简单地用暴力法编码,那么每次修改的复杂度是 O ( n ) O(n) O(n)的,m次修改共 O ( m n ) O(mn) O(mn),总复杂度 O ( m n ) O(mn) O(mn),效率很差。利用差分法,可以把复杂度减少到 O ( m + n ) O(m+n) O(m+n)。
在差分法中,用到了两个数组:原数组 a [ ] a[] a[]、差分数组 D [ ] D[] D[]。
差分数组D[]的定义是 D [ k ] = a [ k ] − a [ k − 1 ] D[k] = a[k] - a[k-1] D[k]=a[k]−a[k−1],即原数组 a [ ] a[] a[]的相邻元素的差。从定义可以推出 a [ k ] = D [ 1 ] + D [ 2 ] + . . . + D [ k ] a[k] = D[1] + D[2] + ... + D[k] a[k]=D[1]+D[2]+...+D[k] ,也就是说, a [ ] a[] a[]是 D [ ] D[] D[]的前缀和。这个公式揭示了 a [ ] a[] a[]和 D [ ] D[] D[]的关系,“差分是前缀和的逆运算”,它把求 a [ k ] a[k] a[k]转化为求D的前缀和。为加深对前缀和的理解,可以把每个 D [ ] D[] D[]看成一条直线上的小线段,它的两端是相邻的 a [ ] a[] a[];这些小线段相加,就得到了从起点开始的长线段 a [ ] a[] a[]。
注意, a [ ] a[] a[]和 D [ ] D[] D[]的值都可能为负,下面图中所有的 D [ ] D[] D[]都是长度为正的线段,只是为了方便图示。

如何用差分数组记录区间修改?为什么利用差分数组能提升修改的效率呢?
把区间 [ L , R ] [L, R] [L,R]内每个元素加上 d d d,对应的 D [ ] D[] D[]做以下操作:
(1)把 D [ L ] D[L] D[L]加上 d d d:
D[L] += d
(2)把 D [ R + 1 ] D[R+1] D[R+1]减去 d d d:
D[R+1] -= d
每次操作只需要修改区间 [ L , R ] [L, R] [L,R]的两个端点的 D [ ] D[] D[]值,复杂度是 O ( 1 ) O(1) O(1)的。经过这种操作后,原来直接在 a [ ] a[] a[]上做的复杂度为 O ( n ) O(n) O(n)的区间修改操作,就变成了在 D [ ] D[] D[]上做的复杂度为 O ( 1 ) O(1) O(1)的端点操作。
利用 D [ ] D[] D[],能精确地实现只修改区间内元素的目的,而不会修改区间外的 a [ ] a[] a[]值。因为前缀和 a [ x ] = D [ 1 ] + D [ 2 ] + . . . + D [ x ] a[x] = D[1] + D[2] + ... + D[x] a[x]=D[1]+D[2]+...+D[x],有:
(1) 1 ≤ x < L 1 ≤ x < L 1≤x<L,前缀和 a [ x ] a[x] a[x]不变;
(2) L ≤ x ≤ R L ≤ x ≤ R L≤x≤R,前缀和 a [ x ] a[x] a[x]增加了 d d d;
(3) R < x ≤ N R < x ≤ N R<x≤N,前缀和 a [ x ] a[x] a[x]不变,因为被 D [ R + 1 ] D[R+1] D[R+1]中减去的 d d d抵消了。
完成区间修改并得到 D [ ] D[] D[]后,最后用 D [ ] D[] D[]计算 a [ ] a[] a[],复杂度是 O ( n ) O(n) O(n)的。m次区间修改和1次查询,总复杂度为 O ( m + n ) O(m + n) O(m+n),比暴力法的 O ( m n ) O(mn) O(mn)好多了。
下面给出一个例题。
Color the ball hdu 1556 http://acm.hdu.edu.cn/showproblem.php?pid=1556
问题描述:N个气球排成一排,从左到右依次编号为1, 2, 3 … N。每次给定2个整数L, R(L<= R),lele从气球L开始到气球R依次给每个气球涂一次颜色。但是N次以后lele已经忘记了第I个气球已经涂过几次颜色了,你能帮他算出每个气球被涂过几次颜色吗?
输入:每个测试实例第一行为一个整数N,(N <= 100000)。接下来的N行,每行包括2个整数L, R(1 <= L<= R<= N)。当N = 0,输入结束。
输出:每个测试实例输出一行,包括N个整数,第I个数代表第I个气球总共被涂色的次数。
这个例题是简单差分法的直接应用,下面给出代码。代码第13、14行是区间修改,第17行的 a [ i ] = a [ i − 1 ] + D [ i ] a[i] = a[i-1] + D[i] a[i]=a[i−1]+D[i],即利用 D [ ] D[] D[]求得了最后的 a [ ] a[] a[]。这个式子就是 a [ i ] − a [ i − 1 ] = D [ i ] a[i] - a[i-1] = D[i] a[i]−a[i−1]=D[i],它是差分数组的定义。
注意 a [ ] a[] a[]的计算方法。 a [ i ] = a [ i − 1 ] + D [ i ] a[i] = a[i-1] + D[i] a[i]=a[i−1]+D[i]是一个递推公式,通过它能在一个 i i i循环中求得所有的 a [ ] a[] a[]。如果不用递推,而是直接用前缀和 a [ k ] = D [ 1 ] + D [ 2 ] + . . . + D [ k ] a[k]=D[1] + D[2] + ... + D[k] a[k]=D[1]+D[2]+...+D[k] 来求所有的 a [ ] a[] a[],就需要用两个循环 i 、 k i、k i、k。
//hdu 1556用差分数组求解
#include上面的代码用了一个小技巧,可以省掉 a [ ] a[] a[],从而节省空间。在17行后求原数组 a [ ] a[] a[]的时候,在推导式子 a [ i ] = a [ i − 1 ] + D [ i ] a[i] = a[i-1] + D[i] a[i]=a[i−1]+D[i]时,把已经使用过的较小的 D [ ] D[] D[]直接当成 a [ ] a [] a[]即可。把第17~20行的 a [ ] 改 为 D [ ] a[]改为D[] a[]改为D[],也能通过。这个技巧在后面的二维差分、三维差分中也能用,节省一倍的空间。
1.2 差分的局限性
读者已经注意到,利用差分数组 D [ ] D[] D[]可以把 O ( n ) O(n) O(n)的区间修改,变成 O ( 1 ) O(1) O(1)的端点修改,从而提高了修改操作的效率。
但是,一次查询操作,即查询某个 a [ i ] a[i] a[i],需要用 D [ ] D[] D[]计算整个原数组 a [ ] a[] a[],计算量是 O ( n ) O(n) O(n)的,即一次查询的复杂度是 O ( n ) O(n) O(n)的。在上面的例题中,如果查询不是发生了一次,而是这样:有m次修改,有k次查询,且修改和查询的顺序是随机的。此时总复杂度是:m次修改复杂度 O ( m ) O(m) O(m),k次查询复杂度 O ( k n ) O(kn) O(kn),总复杂度 O ( m + k n ) O(m + kn) O(m+kn)。还不如直接用暴力法,总复杂度 O ( m n + k ) O(mn + k) O(mn+k)。
这种题型是“区间修改+单点查询”,用差分数组往往不够用。因为差分数组对“区间修改”很高效,但是对“单点查询”并不高效。此时需要用树状数组和线段树来求解,详情见第4章的树状数组、线段树专题。在树状数组专题中,重新讲解了hdu 1556这道例题。
树状数组常常结合差分数组来解决更复杂的问题,见本博客的树状数组专题。差分数组也常用于“树上差分”,见本博客LCA专题的“树上差分”。
2. 二维差分
从一维差分容易扩展到二维差分。一维是线性数组,一个区间 [ L , R ] [L, R] [L,R]有两个端点;二维是矩阵,一个区间由四个端点围成。
下面给出一个模板题。
地毯 洛谷P3397 https://www.luogu.com.cn/problem/P3397
问题描述:在 n×n 的格子上有m个地毯。给出这些地毯的信息,问每个点被多少个地毯覆盖。
输入: 第一行是两个正整数n,m。接下来m行,每行2个坐标(x1, y1)和(x2, y2),代表一块地毯,左上角是(x1, y1),右下角是(x2, y2)。
输出: 输出n行,每行n个正整数。第i行第j列的正整数表示(i, j)这个格式被多少地毯覆盖。
这一题是hdu 1556的二维扩展,其修改操作和查询操作完全一样。
存储矩阵需要很大的空间。如果题目有空间限制,例如100M,那么二维差分能处理多大的n?定义两个二维矩阵 a [ ] [ ] 和 D [ ] [ ] a[][]和D[][] a[][]和D[][],设矩阵的每个元素是2字节的 i n t int int型,可以计算出最大的n = 5000。不过,也可以不定义 a [ ] [ ] a[][] a[][],而是像一维情况下一样,直接用 D [ ] [ ] 来 表 示 a [ ] [ ] D[][]来表示a[][] D[][]来表示a[][],这样能剩下一半的空间。
在用差分之前,先考虑能不能用暴力法。每次修改复杂度是 O ( n 2 ) O(n^2) O(n2),共m次,总复杂度 O ( m × n 2 ) O(m×n^2) O(m×n2),超时。
二维差分的复杂度是多少?一维差分的一次修改是 O ( 1 ) O(1) O(1)的,二维差分的修改估计也是 O ( 1 ) O(1) O(1)的;一维差分的一次查询是 O ( n ) O(n) O(n)的,二维差分是 O ( n 2 ) O(n^2) O(n2)的,所以二维差分的总复杂度是 O ( m + n 2 ) O(m + n^2) O(m+n2)。由于计算一次二维矩阵的值需要 O ( n 2 ) O(n^2) O(n2)次计算,所以二维差分已经达到了最好的复杂度。
下面从一维差分推广到二维差分。
(1)前缀和。
在一维差分中,原数组 a [ ] a[] a[]是从第1个 D [ 1 ] D[1] D[1]开始的差分数组 D [ ] D[] D[]的前缀和: a [ k ] = D [ 1 ] + D [ 2 ] + . . . + D [ k ] a[k] = D[1] + D[2] + ... + D[k] a[k]=D[1]+D[2]+...+D[k]。
在二维差分中, a [ ] [ ] a[][] a[][]是差分数组 D [ ] [ ] D[][] D[][]的前缀和,即由原点坐标 ( 1 , 1 ) (1, 1) (1,1)和坐标 ( i , j ) (i, j) (i,j)围成的矩阵中,所有的 D [ ] [ ] D[][] D[][]相加等于 a [ i ] [ j ] a[i][j] a[i][j]。为加深对前缀和的理解,可以把每个 D [ ] [ ] D[][] D[][]看成一个小格;在坐标 ( 1 , 1 ) 和 ( i , j ) (1, 1)和(i, j) (1,1)和(i,j)所围成的范围内,所有小格子加起来的总面积,等于 a [ i ] [ j ] a[i][j] a[i][j]。下面的图中,每个格子的面积是一个 D [ ] [ ] D[][] D[][],例如阴影格子是 D [ i ] [ j ] D[i][j] D[i][j],它由4个坐标点定义: ( i − 1 , j ) 、 ( i , j ) 、 ( i − 1 , j − 1 ) 、 ( i , j − 1 ) (i-1, j)、(i, j)、(i-1, j-1)、(i, j-1) (i−1,j)、(i,j)、(i−1,j−1)、(i,j−1)。坐标点 ( i , j ) (i, j) (i,j)的值是 a [ i ] [ j ] a[i][j] a[i][j],它等于坐标 ( 1 , 1 ) 和 ( i , j ) (1, 1)和(i, j) (1,1)和(i,j)所围成的所有格子的总面积。图中故意把小格子画得长宽不同,是为了体现它们的面积不同。
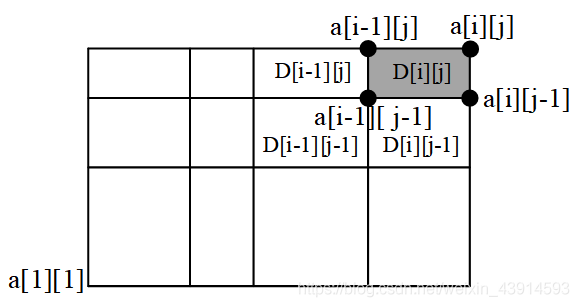
注意在一些题目中, D [ ] [ ] D[][] D[][]可以为负。图中把 D [ ] [ ] D[][] D[][]用“面积”来演示,而面积都是正的,这个图示只是为了加深对前缀和的理解。
(2)差分的定义。在一维情况下, D [ i ] = a [ i ] − a [ i − 1 ] D[i] = a[i] - a[i-1] D[i]=a[i]−a[i−1]。在二维情况下,差分变成了相邻的 a [ ] [ ] a[][] a[][]的“面积差”,计算公式是: D [ i ] [ j ] = a [ i ] [ j ] – a [ i − 1 ] [ j ] – a [ i ] [ j − 1 ] + a [ i − 1 ] [ j − 1 ] D[i][j] = a[i][j] – a[i-1][j] – a[i][j-1] + a[i-1][j-1] D[i][j]=a[i][j]–a[i−1][j]–a[i][j−1]+a[i−1][j−1]。这个公式可以通过上面的图来观察。阴影方格表示 D [ i ] [ j ] D[i][j] D[i][j]的值,它的面积这样求:大面积 a [ i ] [ j ] a[i][j] a[i][j]减去两个小面积 a [ i − 1 ] [ j ] 、 a [ i ] [ j − 1 ] a[i-1][j]、a[i][j-1] a[i−1][j]、a[i][j−1],由于两个小面积的公共面积 a [ i − 1 ] [ j − 1 ] a[i-1][j-1] a[i−1][j−1]被减了2次,所以需要加回来1次。
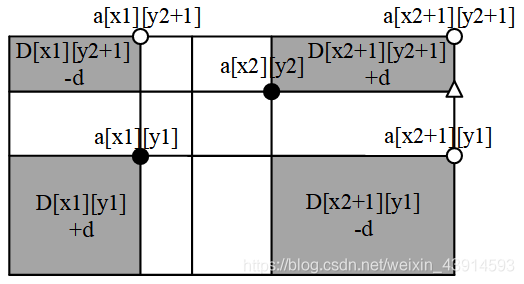
(3)区间修改。在一维情况下,做区间修改只需要修改区间的两个端点的 D [ ] D[] D[]值。在二维情况下,一个区间是一个小矩阵,有4个端点,只需要修改这4个端点的 D [ ] [ ] D[][] D[][]值。例如坐标点 ( x 1 , y 1 ) (x1, y1) (x1,y1) ~ ( x 2 , y 2 ) (x2, y2) (x2,y2)定义的区间,对应4个端点的 D [ ] [ ] D[][] D[][]:
D[x1][y1] += d; //二维区间的起点
D[x1][y2+1] -= d; //把x看成常数,y从y1到y2+1
D[x2+1][y1] -= d; //把y看成常数,x从x1到x2+1
D[x2+1][y2+1] += d; //由于前两式把d减了2次,多减了1次,这里加1次回来
下图是区间修改的图示。2个黑色点围成的矩形是题目给出的区间修改范围。只需要改变4个 D [ ] [ ] D[][] D[][]值,即改变图中的4个阴影块的面积。读者可以用这个图,观察每个坐标点的 a [ ] [ ] a[][] a[][]值的变化情况。例如符号“∆”标记的坐标 ( x 2 + 1 , y 2 ) (x2+1, y2) (x2+1,y2),它在修改的区间之外; a [ x 2 + 1 ] [ y 2 ] a[x2+1][y2] a[x2+1][y2]的值是从 ( 1 , 1 ) 到 ( x 2 + 1 , y 2 ) (1,1)到(x2+1, y2) (1,1)到(x2+1,y2)的总面积,在这个范围内, D [ x 1 ] [ y 1 ] + d , D [ x 2 + 1 ] [ y 1 ] − d D[x1][y1]+d,D[x2+1][y1]-d D[x1][y1]+d,D[x2+1][y1]−d,两个 d d d抵消, a [ x 2 + 1 ] [ y 2 ] a[x2+1][y2] a[x2+1][y2]保持不变。
下面给出洛谷P3397的两种实现。
2.1 用差分数组的递推公式求前缀和
前缀和 a [ ] [ ] a[][] a[][]的计算用到了递推公式:
a [ i ] [ j ] = D [ i ] [ j ] + a [ i − 1 ] [ j ] + a [ i ] [ j − 1 ] − a [ i − 1 ] [ j − 1 ] ; a[i][j] = D[i][j] + a[i-1][j] + a[i][j-1] - a[i-1][j-1]; a[i][j]=D[i][j]+a[i−1][j]+a[i][j−1]−a[i−1][j−1];
16行到23行用 D [ ] [ ] D[][] D[][]推出 a [ ] [ ] a[][] a[][]并打印出来。
为了节约空间,可以不定义 a [ ] [ ] a[][] a[][],而是把用过的 D [ ] [ ] D[][] D[][]看成 a [ ] [ ] a[][] a[][]。这个小技巧在一维差分中介绍过。
#include2.2 直接计算前缀和
其实不用递推公式,而是直接求前缀和也行。根据图2,前缀和是总面积,分别从 x x x方向和 y y y方向,用两次循环计算,并直接用 D [ ] [ ] D[][] D[][]记录结果,最后算出的 D [ ] [ ] D[][] D[][]就是 a [ ] [ ] a[][] a[][]。

以阴影处的 D [ 2 ] [ 2 ] D[2][2] D[2][2]为例,它最后的值代表 a [ 2 ] [ 2 ] a[2][2] a[2][2],是4个小格子的总面积:
D [ 1 ] [ 1 ] + D [ 1 ] [ 2 ] + D [ 2 ] [ 1 ] + D [ 2 ] [ 2 ] D[1][1] + D[1][2] + D[2][1] + D[2][2] D[1][1]+D[1][2]+D[2][1]+D[2][2]
计算过程是:
(1)先累加计算 y y y方向,得:
D [ 1 ] [ 2 ] = D [ 1 ] [ 1 ] + D [ 1 ] [ 2 ] 、 D [ 2 ] [ 2 ] = D [ 2 ] [ 1 ] + D [ 2 ] [ 2 ] D[1][2] = D[1][1]+ D[1][2]、D[2][2] = D[2][1]+ D[2][2] D[1][2]=D[1][1]+D[1][2]、D[2][2]=D[2][1]+D[2][2]
(2)再累加计算 x x x方向,得:
D [ 2 ] [ 1 ] = D [ 1 ] [ 1 ] + D [ 2 ] [ 1 ] 、 D [ 2 ] [ 2 ] = D [ 1 ] [ 2 ] + D [ 2 ] [ 2 ] = D [ 1 ] [ 1 ] + D [ 1 ] [ 2 ] + D [ 2 ] [ 1 ] + D [ 2 ] [ 2 ] D[2][1]=D[1][1]+D[2][1]、D[2][2]=D[1][2]+D[2][2]= D[1][1]+D[1][2]+ D[2][1]+ D[2][2] D[2][1]=D[1][1]+D[2][1]、D[2][2]=D[1][2]+D[2][2]=D[1][1]+D[1][2]+D[2][1]+D[2][2]
实际上,在这个计算过程中, D [ 1 ] [ 1 ] 、 D [ 1 ] [ 2 ] 、 D [ 2 ] [ 1 ] 、 D [ 2 ] [ 2 ] D[1][1]、D[1][2]、D[2][1]、D[2][2] D[1][1]、D[1][2]、D[2][1]、D[2][2]都更新了,计算结果代表了 a [ 1 ] [ 1 ] 、 a [ 1 ] [ 2 ] 、 a [ 2 ] [ 1 ] 、 a [ 2 ] [ 2 ] a[1][1]、a[1][2]、a[2][1]、a[2][2] a[1][1]、a[1][2]、a[2][1]、a[2][2]。
把方法1代码的16-24行替换为下面的代码,最后得到的 D [ ] [ ] D[][] D[][]就是所有的前缀和,即最新的 a [ ] [ ] a[][] a[][]。请对照图2理解代码。
for(int i=1; i<=n; ++i)
for(int j=1; j<n; ++j) //注意这里是j
D[i][j+1] += D[i][j]; //把i看成定值,先累加计算j方向
for(int j=1; j<=n; ++j)
for(int i=1; i<n; ++i) //注意这里是i
D[i+1][j] += D[i][j]; //把j看成定值,再累加计算i方向
for(int i=1; i<=n; ++i) {
//打印
for(int j=1; j<=n; ++j)
printf("%d ",D[i][j]);
printf("\n"); //换行
}
对比这两种代码:
(1)这两种代码的复杂度是一样的。从计算量上看,没有优劣之分。
(2)代码2不如代码1清晰简洁,所以代码2这种写法一般也用不着。
(3)代码2也有优点,它不需要用到递推公式,而是直接求前缀和。
这里给出代码2这种方法,是为了在下一小节的三维差分中使用它。由于在三维情况下,差分数组的 D [ ] [ ] [ ] D[][][] D[][][]和原数组 a [ ] [ ] [ ] a[][][] a[][][]的递推公式很难写出来,所以用代码2这种方法更容易编码。
3. 三维差分
三维差分的模板代码比较少见。
三维差分比较复杂,请结合本节中的几何图进行理解。
与一维差分、二维差分的思路类似,下面给出三维差分的有关特性。
(1)元素的值用三维数组 a [ ] [ ] [ ] a[][][] a[][][]来定义,差分数组 D [ ] [ ] [ ] D[][][] D[][][]也是三维的。把三维差分想象成在立体空间上的操作。一维的区间是一个线段,二维是矩形,那么三维就是立体块。一个小立体块有8个顶点,所以三维的区间修改,需要修改8个 D [ ] [ ] [ ] D[][][] D[][][]值。
(2)前缀和。
在二维差分中, a [ ] [ ] a[][] a[][]是差分数组 D [ ] [ ] D[][] D[][]的前缀和,即由原点坐标 ( 1 , 1 ) (1, 1) (1,1)和坐标 ( i , j ) (i, j) (i,j)围成的矩阵中,所有的 D [ ] [ ] D[][] D[][](看成小格子)相加等于 a [ i ] [ j ] a[i][j] a[i][j](看成总面积)。
在三维差分中, a [ ] [ ] [ ] a[][][] a[][][]是差分数组 D [ ] [ ] [ ] D[][][] D[][][]的前缀和。即由原点坐标 ( 1 , 1 , 1 ) (1, 1, 1) (1,1,1)和坐标 ( i , j , k ) (i, j, k) (i,j,k)所标记的范围中,所有的 D [ ] [ ] [ ] D[][][] D[][][]相加等于 a [ i ] [ j ] [ k ] a[i][j][k] a[i][j][k]。把每个 D [ ] [ ] [ ] D[][][] D[][][]看成一个小立方体;在坐标 ( 1 , 1 , 1 ) (1, 1, 1) (1,1,1)和 ( i , j , k ) (i, j, k) (i,j,k)所围成的空间中,所有小立体块加起来的总体积,等于 a [ i ] [ j ] [ k ] a[i][j][k] a[i][j][k]。每个小立方体由8个坐标点定义,见下面图中的坐标点。坐标点 ( i , j , k ) (i, j, k) (i,j,k)的值是 a [ i ] [ j ] [ k ] a[i][j][k] a[i][j][k]; D [ i ] [ j ] [ k ] D[i][j][k] D[i][j][k]的值是图中小立方体的体积。

(3)差分的定义。在三维情况下,差分变成了相邻的 a [ ] [ ] [ ] a[][][] a[][][]的“体积差”。如何写出差分的递推计算公式?
一维差分和二维差分的递推计算公式很好写。
三维差分, D [ i ] [ j ] [ k ] D[i][j][k] D[i][j][k]的几何意义是图中小立方体的体积,它可以通过这个小立方体的8个顶点的值推出来。思路与二维情况下类似,二维的 D [ ] [ ] D[][] D[][]是通过小矩形的四个顶点的 a [ ] [ ] a[][] a[][]值来计算的。不过,三维情况下,递推计算公式很难写,8个顶点有8个 a [ ] [ ] [ ] a[][][] a[][][],把脑袋绕晕了也不容易写对。
上一小节的二维差分中,曾用过另一种方法,直接对D数组求前缀和。在三维情况下也可以用这种方法求前缀和,得到所有的 a [ ] [ ] [ ] a[][][] a[][][]的最新值。
(4)区间修改。在三维情况下,一个区间是一个立方体,有8个顶点,只需要修改这8个顶点的 D [ ] [ ] [ ] D[][][] D[][][]值。例如坐标点 ( x 1 , y 1 , z 1 ) (x1, y1, z1) (x1,y1,z1) ~ ( x 2 , y 2 , z 2 ) (x2, y2, z2) (x2,y2,z2)定义的区间,对应8个 D [ ] [ ] [ ] D[][][] D[][][],请对照上面的图来想象它们的位置。
D[x1][y1][z1] += d; //前面:左下顶点,即区间的起始点
D[x2+1][y1][z1] -= d; //前面:右下顶点的右边一个点
D[x1][y1][z2+1] -= d; //前面:左上顶点的上面一个点
D[x2+1][y1][z2+1] += d; //前面:右上顶点的斜右上方一个点
D[x1][y2+1][z1] -= d; //后面:左下顶点的后面一个点
D[x2+1][y2+1][z1] += d; //后面:右下顶点的斜右后方一个点
D[x1][y2+1][z2+1] += d; //后面:左上顶点的斜后上方一个点
D[x2+1][y2+1][z2+1] -= d; //后面:右上顶点的斜右上后方一个点,即区间终点的后一个点
下面给出一个三维差分的例题。
三体攻击 蓝桥杯2018年省赛A组
提交地址:https://www.lanqiao.cn/problems/180/learning/
问题描述:三体人将对地球发起攻击。为了抵御攻击,地球人派出了n = A × B × C 艘战舰,在太空中排成一个 A 层 B 行 C 列的立方体。其中,第 i 层第 j 行第 k 列的战舰(记为战舰 (i, j, k))的生命值为 s(i, j, k)。
三体人将会对地球发起 m 轮“立方体攻击”,每次攻击会对一个小立方体中的所有战舰都造成相同的伤害。具体地,第 t 轮攻击用 7 个参数 x1, x2, y1, y2, z1, z2, d 描述;
所有满足i∈[x1, x2], j∈[y1, y2], k∈[z1, z2] 的战舰 (i, j, k) 会受到 d 的伤害。如果一个战舰累计受到的总伤害超过其防御力,那么这个战舰会爆炸。
地球指挥官希望你能告诉他,第一艘爆炸的战舰是在哪一轮攻击后爆炸的。
输入:第一行包括 4 个正整数 A, B, C, m;
第二行包含 A × B × C 个整数,其中第 ((i − 1)×B + (j − 1)) × C + (k − 1)+1 个数为 s(i, j, k);
第 3 到第 m + 2 行中,第 (t − 2) 行包含 7 个正整数 x1, x2, y1, y2, z1, z2, d。
A × B × C ≤ 10^6, m ≤ 10^6, 0 ≤ s(i, j, k), d ≤ 10^9。
输出:输出第一个爆炸的战舰是在哪一轮攻击后爆炸的。保证一定存在这样的战舰。
首先看数据规模,有 n = 1 0 6 n=10^6 n=106个点, m = 1 0 6 m=10^6 m=106次攻击,如果用暴力法,统计每次攻击后每个点的生命值,那么复杂度是 O ( m n ) O(mn) O(mn)的,超时。
本题适合用三维差分,每次攻击只修改差分数组 D [ ] [ ] [ ] D[][][] D[][][],一次修改的复杂度是 O ( 1 ) O(1) O(1), m m m次修改的总复杂度只有 O ( m ) O(m) O(m)。
但是光用差分数组并不能解决问题。因为在差分数组上查询区间内的每个元素是否小于0,需要用差分数组来计算区间内每个元素的值,复杂度是 O ( n ) O(n) O(n)的。合起来的总复杂度还是O(mn)的,跟暴力法的复杂度一样。
本题需要结合第二个算法:二分法。从第1次修改到第m次修改,肯定有一次修改是临界点。在临界点前,没有负值(战舰爆炸);在临界点后,出现了负值,且后面一直有负值。那么对m进行二分,就能在 O ( l o g m ) O(logm) O(logm)次内找到这个临界点,这就是答案。总复杂度 O ( n l o g m ) O(nlogm) O(nlogm)。
下面给出代码。其中check()函数包含了三维差分的全部内容。代码有几个关键点:
(1)没有定义 a [ ] [ ] [ ] a[][][] a[][][],而是用 D [ ] [ ] [ ] D[][][] D[][][]来代替。
(2)压维。直接定义三维差分数组 D [ ] [ ] [ ] D[][][] D[][][]不太方便。虽然坐标点总数量 n = A × B × C = 1 0 6 n = A × B × C = 10^6 n=A×B×C=106比较小,但是每一维都需要定义到 1 0 6 10^6 106,那么总空间就是 1 0 1 8 10^18 1018。经过压维,用一维数组 D [ ] D[] D[],总长度仍然是 1 0 6 10^6 106的。这个技巧很有用。
(3)check()中19-26行,在 D [ ] D[] D[]上记录区间修改。
(4)check()中29-40行的3个for循环计算前缀和,原理见二维差分的代码2。它分别从 x 、 y 、 z x、y、z x、y、z三个方向累加小立方体的体积,计算出所有的前缀和。
#include4. 差分习题
一维差分:poj 3263;hdu 6273,1121;洛谷P3406,P3948,P4552
二维差分:洛谷P3397,hdu 6514
三维差分:蓝桥杯A组2018省赛“三体攻击”