Paddle图像分割从入门到实践(三):PSPnet与DeepLab
Pyramid Scene Parsing Network(PSPnet)
Unet增强感受野的方法是将不同感受野的特征图进行concat,而PSPnet的思路是使用不同大小的卷积核来卷积,产生不同的感受野.
ReceptiveField

Pyramid Pooling Module

Dilated Conv
由于引入了较大的卷积核,导致网络的计算量成平方倍增加,为解决运算量的问题,我们将卷积核替换为带洞卷积

其中可能需要大量使用到Adaptive pool和1x1 Conv来改变特征图的尺寸

Adaptive pooling计算公式

最终PSPnet的网络结构显示为下图

代码实践
PSPnNet
import numpy as np
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Layer
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Dropout
from resnet_dilated import ResNet50
# pool with different bin_size
# interpolate back to input size
# concat
class PSPModule(Layer):
def __init__(self,num_channels,bin_size_list):
super(PSPModule,self).__init__()
self.bin_size_list = bin_size_list
num_filters = num_channels //len(bin_size_list)
self.features = []
#融合部分
for i in range(len(bin_size_list)):
self.features.append(
fluid.dygraph.Sequential(
Conv2D(num_channels,num_filters,1),
BatchNorm(num_filters,act='relu')
)
)
def forward(self,inputs):
out = [inputs]
for idx,f in enumerate(self.features):
x = fluid.layers.adaptive_pool2d(inputs,self.bin_size_list[idx])
x = f(x)
x = fluid.layers.interpolate(x,inputs.shape[2::],align_corners=True)
out.append(x)
#out is list
out = fluid.layers.concat(out,axis=1) #NCHW
return out
class PSPNet(Layer):
def __init__(self, num_classes=59, backbone='resnet50'):
super(PSPNet, self).__init__()
res = ResNet50(False)
# stem: res.conv, res.pool2d_max
self.layer0 = fluid.dygraph.Sequential(
res.conv,
res.pool2d_max
)
self.layer1 =res.layer1
self.layer2 =res.layer2
self.layer3 =res.layer3
self.layer4 =res.layer4
num_channels = 2048
# psp: 2048 -> 2048*2
self.pspmodule = PSPModule(num_channels,[1,2,3,6])
num_channels *= 2
# cls: 2048*2 -> 512 -> num_classes
self.classifier = fluid.dygraph.Sequential(
Conv2D(num_channels=num_channels,num_filters=512,filter_size=3,padding=1),
BatchNorm(512,'relu'),
Dropout(0.1),
Conv2D(num_channels= 512,num_filters=num_classes,filter_size=1),
)
# aux: 1024 -> 256 -> num_classes
def forward(self, inputs):
#backbone
x = self.layer0(inputs)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
#pspmodule
x = self.pspmodule(x)
x = self.classifier(x)
x = fluid.layers.interpolate(x,inputs.shape[2::],align_corners=True)
return x
# aux: tmp_x = layer3
def main():
with fluid.dygraph.guard(fluid.CPUPlace()):
x_data=np.random.rand(2,3, 473, 473).astype(np.float32)
x = to_variable(x_data)
model = PSPNet(num_classes=59)
model.train()
pred, aux = model(x)
print(pred.shape, aux.shape)
if __name__ =="__main__":
main()
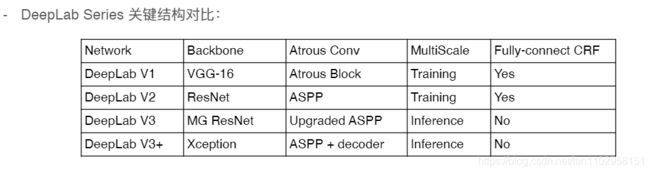
DeepLab





代码实践
import numpy as np
import paddle.fluid as fluid
from paddle.fluid.dygraph import to_variable
from paddle.fluid.dygraph import Layer
from paddle.fluid.dygraph import Conv2D
from paddle.fluid.dygraph import BatchNorm
from paddle.fluid.dygraph import Dropout
from resnet_multi_grid import ResNet50
class ASPPPooling(Layer):
# TODO:
def __init__(self,num_channels,num_filters):
super(ASPPPooling,self).__init__()
self.features = fluid.dygraph.Sequential(
Conv2D(num_channels,num_filters,1),
BatchNorm(num_filters,act = 'relu')
)
def forward(self,inputs):
n,c,h,w = inputs.shape
x = fluid.layers.adaptive_pool2d(inputs,1)
x = self.features(x)
x = fluid.layers.interpolate(x,(h,w),align_corners=False)
return x
class ASPPConv(fluid.dygraph.Sequential):
# TODO:
def __init__(self,num_channels,num_filters,dilation):
super(ASPPConv,self).__init__(
Conv2D(num_channels,num_filters,filter_size=3,padding=dilation,dilation=dilation),
BatchNorm(num_filters,act='relu')
)
class ASPPModule(Layer):
# TODO:
def __init__(self,num_channels,num_filters,rates):
super(ASPPModule,self).__init__()
self.features =[]
self.features.append(
fluid.dygraph.Sequential(
Conv2D(num_channels,num_filters,1),
BatchNorm(num_filters,act = 'relu')
)
)
self.features.append(ASPPPooling(num_channels,num_filters))
for r in rates:
self.features.append(
ASPPConv(num_channels,num_filters,r)
)
self.project = fluid.dygraph.Sequential(
Conv2D(num_filters*(2+len(rates)),num_filters,1),
BatchNorm(num_filters,act = 'relu')
)
def forward(self,inputs):
res = []
for op in self.features:
res.append(op(inputs))
x = fluid.layers.concat(res,axis=1)
#print(x.shape)
x =self.project(x)
return x
class DeepLabHead(fluid.dygraph.Sequential):
def __init__(self, num_channels, num_classes):
super(DeepLabHead, self).__init__(
ASPPModule(num_channels, 256, [12, 24, 36]),
Conv2D(256, 256, 3, padding=1),
BatchNorm(256, act='relu'),
Conv2D(256, num_classes, 1)
)
class DeepLab(Layer):
# TODO:
def __init__(self,num_classes=59):
super(DeepLab,self).__init__()
resnet = ResNet50(pretrained=False, duplicate_blocks=True)
self.layer0 = fluid.dygraph.Sequential(
resnet.conv,
resnet.pool2d_max
)
self.layer1 = resnet.layer1
self.layer2 = resnet.layer2
self.layer3 = resnet.layer3
self.layer4 = resnet.layer4
self.layer5 = resnet.layer5
self.layer6 = resnet.layer6
self.layer7 = resnet.layer7
feature_dim = 2048
self.classifier = DeepLabHead(feature_dim,num_classes)
def forward(self,inputs):
n , c, h, w = inputs.shape
x = self.layer0(inputs)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.layer5(x)
x = self.layer6(x)
x = self.layer7(x)
x = self.classifier(x)
x = fluid.layers.interpolate(x,(h,w),align_corners = False)
return x
def main():
with fluid.dygraph.guard():
x_data = np.random.rand(2, 3, 512, 512).astype(np.float32)
x = to_variable(x_data)
model = DeepLab(num_classes=59)
model.eval()
pred = model(x)
print(pred.shape)
if __name__ == '__main__':
main()