Python计算机视觉编程学习笔记 十 OPENCV
OPENCV
-
- (一)OpenCV 的 Python 接口
- (二)OpenCV 基础知识
-
- 2.1 图像读取和写入
- 2.2 颜色空间
- 2.3 显示图像及结果
- 2.4 平移与缩放
- (三)处理视频
-
- 3.1 视频输入
- 3.2 将视频读取到 NumPy 数组中
- (四)跟踪
-
- 4.1 光流
- 4.2 Lucas-Kanade算法
- (五)更多示例
-
- 5.1 图像修复
- 5.2 利用分水岭变换进行分割 cv2.watershed()
- 5.3 利用霍夫变换检测直线
(一)OpenCV 的 Python 接口
Python 很强大,而且也有自己的图像处理库 PIL,但是相对于 OpenCV 来讲,它还是弱小很多。跟很多开源软件一样 OpenCV 也提供了 完善的 python 接口,非常便于调用。几乎任何一个能想到的成熟算法 都可以通过调用 OpenCV 的函数来实现,超级方便。
OpenCV 是一个C++ 库,它包含了计算机视觉领域的很多模块。除了 C++ 和 C, Python 作为一种简洁的脚本语言,在 C++ 代码基础上的 Python 接口得到了越来越广泛的支持。
导入安装:
import cv2
pip install opencv-python
(二)OpenCV 基础知识
OpenCV有读取、写入图像函数以及矩阵操作和数学库。
2.1 图像读取和写入
函数 imread() 返回图像为一个标准的 NumPy 数组,并且该函数能够处理很多不同格式的图像
读入其他类型的图像转换并保存为.jpg格式:
import cv2
# 读取图像
im = cv2.imread('D:\Data\hsi_result.png')
h,w = im.shape[:2]
print (h,w)
# 保存图像
cv2.imwrite('D:\Data\hsi_result2.jpg',im)
处理结果:

读入一张图像,打印出图像大小,对图像进行转换并保存为.png 格式:
import cv2
# 读取图像
im = cv2.imread('D:\Data\pkq.jpg')
h,w = im.shape[:2]
print (h,w)
# 保存图像
cv2.imwrite('D:\Data\pkq.png',im)
处理效果:


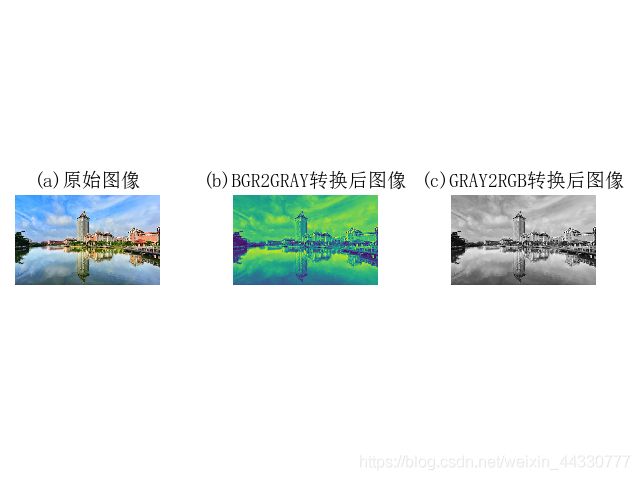
2.2 颜色空间
在 OpenCV 中,图像不是按传统的 RGB 颜色通道,而是按 BGR 顺序(即 RGB 的倒序)存储的。默认的是 BGR。
在读取原图像之后,紧接其后的是 OpenCV 颜色转换代码,最常用转换代码:
-
cv2.COLOR_BGR2GRAY (原图像转化为灰度图像)
-
cv2.COLOR_BGR2RGB (原图像转化为RGB图像)
-
cv2.COLOR_GRAY2BGR (灰度图像图像转化为BGR图像)
import cv2
import numpy as np
from pylab import *
from PIL import Image
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
# 读取图像
im = imread('D:\Data\school.jpg')
im1 = cv2.imread('D:\Data\school.jpg')
gray = cv2.cvtColor(im1,cv2.COLOR_BGR2GRAY)
BGR = cv2.cvtColor(gray,cv2.COLOR_GRAY2BGR)
figure()
subplot(131)
title(u'(a)原始图像', fontproperties=font)
axis('off')
imshow(im)
subplot(132)
title(u'(b)BGR2GRAY转换后图像', fontproperties=font)
axis('off')
imshow(gray)
subplot(133)
title(u'(c)GRAY2RGB转换后图像', fontproperties=font)
axis('off')
imshow(BGR)
show()
处理效果:
图像处理中有多种色彩空间: RGB、HLS、HSV、HSB、YCrCb、CIE XYZ、CIE Lab:
import cv2
import numpy as np
from pylab import *
from PIL import Image
import matplotlib.pyplot as plt
import cv2
img_BGR = cv2.imread('D:\Data\pkq.jpg') # BGR
plt.subplot(3,3,1); plt.imshow(img_BGR);plt.axis('off');plt.title('BGR')
img_RGB = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2RGB)
plt.subplot(3,3,2); plt.imshow(img_RGB);plt.axis('off');plt.title('RGB')
img_GRAY = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2GRAY)
plt.subplot(3,3,3); plt.imshow(img_GRAY);plt.axis('off');plt.title('GRAY')
img_HSV = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2HSV)
plt.subplot(3,3,4); plt.imshow(img_HSV);plt.axis('off');plt.title('HSV')
img_YcrCb = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2YCrCb)
plt.subplot(3,3,5); plt.imshow(img_YcrCb);plt.axis('off');plt.title('YcrCb')
img_HLS = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2HLS)
plt.subplot(3,3,6); plt.imshow(img_HLS);plt.axis('off');plt.title('HLS')
img_XYZ = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2XYZ)
plt.subplot(3,3,7); plt.imshow(img_XYZ);plt.axis('off');plt.title('XYZ')
img_LAB = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2LAB)
plt.subplot(3,3,8); plt.imshow(img_LAB);plt.axis('off');plt.title('LAB')
img_YUV = cv2.cvtColor(img_BGR, cv2.COLOR_BGR2YUV)
plt.subplot(3,3,9); plt.imshow(img_YUV);plt.axis('off');plt.title('YUV')
plt.show()
处理效果:

(皮卡丘太可爱了!)
2.3 显示图像及结果
利用OpenCv绘制功能和窗口管理功能来显示结果。
1.从文件中读取一幅图像,并创建一个整数图像表示:
import cv2
import numpy as np
from pylab import *
from PIL import Image
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
# 读取图像
im = cv2.imread('D:\Data\school-badge.jpg')
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
# 计算积分图像
intim = cv2.integral(gray)
# 归一化并保存
intim = (255.0*intim) / intim.max()
figure()
subplot(121)
title(u'(a)原始图像', fontproperties=font)
axis('off')
imshow(im)
subplot(122)
title(u'(b)归一化后图像', fontproperties=font)
axis('off')
imshow(intim)
show()
处理后:

分析:
读取图像后,将其转化为灰度图像,函数 integral() 创建一幅图像,该图像的每个像素值是原图上方和左边强度值相加后的结果。保存图像前,通过除以图像中的像素最大值将其归一化到0至255之间。
2.从一个种子像素进行泛洪填充 :
import cv2
import numpy as np
from pylab import *
from PIL import Image
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
# 读取图像
im = cv2.imread('D:\Data\school.jpg')
h,w = im.shape[:2]
# 泛洪填充
diff = (6,6,6)
mask = zeros((h+2,w+2),uint8)
im1 = cv2.floodFill(im,mask,(10,10), (255,255,0),diff,diff)
# 在OpenCV 窗口中显示结果
cv2.imshow('flood fill',im)
cv2.waitKey()
# 保存结果
cv2.imwrite('D:\Data\school+sult.jpg',im)
处理效果:

分析:
waitKey() 函数一直处于暂停状态,直到有按键按下,此时窗口才会自动关闭。这里的 floodfill() 函数获取(灰度或彩色)图像、一个掩膜(非零像素区域表明该区域不会被填充)、一 个种子像素以及新的颜色值来代替下限和上限阈值差的泛洪像素。不同的阈值差异由元组 (R,G,B) 给出。泛洪填充以种子像素为起始,只要能在阈值的差异范围内添加新的像素,泛洪填充就会持续扩展。
3 . SURF特征的提取,SURF特征是SIFT特征的一个更快特征提取版 :
# -*- coding: utf-8 -*-
import cv2
import numpy as np
from pylab import *
from PIL import Image
# 添加中文字体支持
from matplotlib.font_manager import FontProperties
font = FontProperties(fname=r"c:\windows\fonts\SimSun.ttc", size=14)
# 读取图像
im = cv2.imread('D:\Data\school.jpg')
# 下采样
im_lowres = cv2.pyrDown(im)
# 变换成灰度图像
gray = cv2.cvtColor(im_lowres,cv2.COLOR_RGB2GRAY)
# 检测特征点
s = cv2.xfeatures2d.SIFT_create()
mask = uint8(ones(gray.shape))
keypoints = s.detect(gray,mask)
# 显示结果及特征点
vis = cv2.cvtColor(gray,cv2.COLOR_GRAY2BGR)
for k in keypoints[::10]:
cv2.circle(vis,(int(k.pt[0]),int(k.pt[1])),2,(0,255,0),-1)
cv2.circle(vis,(int(k.pt[0]),int(k.pt[1])),int(k.size),(0,255,0),2)
cv2.imshow('local descriptors', vis)
cv2.waitKey()
处理效果:

分析:
上图显示了提取出来的 SURF 特征。读取图像后,如果没有给定新尺寸,则用 pyrDown() 进行下采样,创建一个尺寸为原 图像大小一半的新图像,然后将该图像转换为灰度图像,并传递到一个 SURF 关键点检测对象;掩膜决定了在哪些区域应用关键点检测器。在画出检测结果时,将灰度图像转换成彩色图像,并用绿色通道画出检测到的关键点。在每到第十个关键点时循环一次,并在中心画一个圆环,每一个圆环显示出关键点的尺度(大小)。绘图函数 circle() 获取一幅图像、图像坐标(仅整数坐标)元组、半径、绘图的颜色元组以及线条粗细(-1 是实线圆环)。
出现问题:
Traceback (most recent call last):
File "D:/python计算机视觉编程学习/OpenCv/SURF 特征并画出提取出来的 SURF 特征.py", line 20, in <module>
s = cv2.xfeatures2d.SIFT_create()
AttributeError: module 'cv2.cv2' has no attribute 'xfeatures2d'
原因:sift = cv.xfeatures2d.SIFT_create()函数无法使用,也是opencv-contrib-python无法使用。解决方法为降低opencv版本,因为当初安装时是默认版本安装的,版本比较高,但是也不清楚为什么版本高了不支持,反正TensorFlow里面对版本对应要求比较严格。
解决:
步骤1:
卸载opencv
pip uninstall opencv-python
pip uninstall opencv-contrib-python
步骤2:
重装opencv-python、opencv-contrib-python。指定版本安装。
pip install opencv_python==3.4.2.16
pip install opencv-contrib-python==3.4.2.16
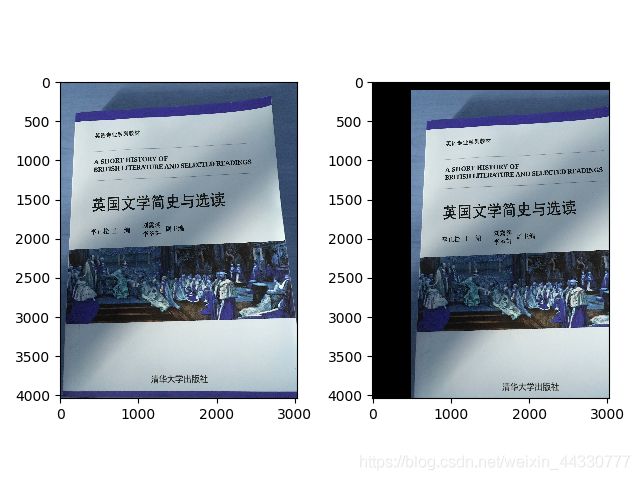
2.4 平移与缩放
1.图像平移:
# -*- coding: utf-8 -*-
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取图像
img = cv2.imread('D:\Data\Book1.jpg')
print(img.shape)
# 定义平移矩阵
M = np.float32([[1, 0, 500],
[0, 1, 100]])
# 变换后的大小
rows, cols = img.shape[:2]
# 平移
translation = cv2.warpAffine(img, M, (cols, rows))
plt.subplot(121)
plt.imshow(img)
plt.subplot(122)
plt.imshow(translation)
plt.show()
处理效果:
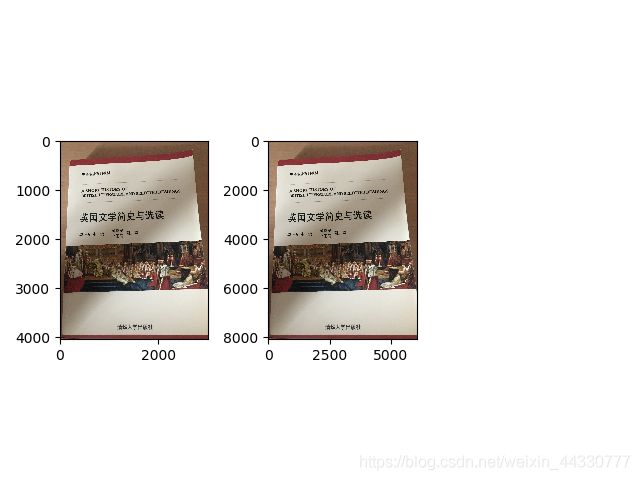
2.图像缩放:
import cv2
import matplotlib.pyplot as plt
from pylab import *
from PIL import Image
import sys
img = imread('D:\Data\Book1.jpg')
# 插值:interpolation
# None本应该是放图像大小的位置的,后面设置了缩放比例,
# 所有就不要了
res1 = cv2.resize(img, None, fx=2, fy=2, interpolation=cv2.INTER_CUBIC)
# 直接规定缩放大小,这个时候就不需要缩放因子
height, width = img.shape[:2]
res2 = cv2.resize(img, (2 * width, 2 * height), interpolation=cv2.INTER_CUBIC)
plt.subplot(131)
plt.imshow(img)
plt.subplot(132)
plt.imshow(res1)
plt.show()
处理效果:
(三)处理视频
单纯使用 Python 来处理视频有些困难,因为需要考虑速度、编解码器、摄像机、操作系统和文件格式。目前还没有针对 Python 的视频库,使用 OpenCV 的 Python 接口是唯一不错的选择。
3.1 视频输入
为了获取视频,你应该创建一个 VideoCapture 对象。他的参数可以是 设备的索引号,或者是一个视频文件。设备索引号就是在指定要使用的摄像头。 一般的笔记本电脑都有内置摄像头。所以参数就是 0。可以通过设置成 1 或 者其他的来选择别的摄像头。之后,你就可以一帧一帧的捕获视频了。但是最后,别忘了停止捕获视频。
OpenCV 能够很好地支持从摄像头读取视频 :
# -*- coding: utf-8 -*-
import cv2
# 设置视频捕获
cap = cv2.VideoCapture(0)
while True:
ret,im = cap.read()
cv2.imshow('video test',im)
key = cv2.waitKey(10)
if key == 27:
break
if key == ord(' '):
cv2.imwrite('D:\Data\id_result.jpg',im)
捕捉:

说明:
捕获对象 VideoCapture 从摄像头或文件捕获视频。通过一个整数进行初始化,该整数为视频设备的 id。如果仅有一个摄像头与计算机相连接,那么该摄像头的 id 为 0。read() 方法解码并返回下一视频帧,第一个变量 ret 是一个判断视频帧是否成功读入的标志,第二个变量im则是实际读入的图像数组。函数 waitKey() 等待用户按键:如果按下的是 Esc 键(ASCII 码是 27)键,则退出应用;如果按下的是空格键,就保存该视频帧。
拓展将摄像头捕获的数据作为输入,并在 OpenCV 窗口中实时显示经模糊的(彩色)图像 :
import cv2
# 设置视频捕获
cap = cv2.VideoCapture(0)
while True:
ret,im = cap.read()
blur = cv2.GaussianBlur(im, (0, 0), 5)
cv2.imshow('camera blur', blur)
if cv2.waitKey(10) == 27:
break
if key == ord(' '):
cv2.imwrite('D:\Data\id_result2.jpg', im)

每一视频帧都会被传递给 GaussianBlur() 函数,该函数会用高斯滤波器对传入的该帧图像进行滤波。这里,实验所传递的是彩色图像,所以 Gaussian Blur() 函数会录入对彩色图像的每一个通道单独进行模糊。该函数需要为高斯函数设定滤波器尺寸 (保存在元组中)及标准差;在本例中标准差设为 5。如果该滤波器尺寸设为 0,则它由标准差自动决定,显示出的结果与上面的实验结果相似。
3.2 将视频读取到 NumPy 数组中
使用 OpenCV 可以从一个文件读取视频帧,并将其转换成 NumPy 数组。下面是一个从摄像头捕获视频并将视频帧存储在一个 NumPy 数组中的例子 :
import cv2
import numpy as np
# 设置视频捕获
cap = cv2.VideoCapture(0)
frames = []
# 获取帧,存储到数组中
while True:
ret,im = cap.read()
cv2.imshow('video',im)
frames.append(im)
if cv2.waitKey(10) == 27:
break
frames = array(frames)
# 检查尺寸
print im.shape
print frames.shape
上述代码将每一视频帧数组添加到列表末,直到捕获结束。最终得到的数组会有帧数、帧高、帧宽及颜色通道数(3 个),打印出的结果如下:
![]()
(四)跟踪
跟踪是在图像序列或视频里对其中的目标进行跟踪的过程。
4.1 光流
光流是目标、场景或摄像机在连续两帧图像间运动时造成的目标的运动。它是图像在平移过程中的二维矢量场。作为一种经典并深入研究了得方法,它在诸多视频压缩、运动估计、目标跟踪和图像分割等计算机视觉中得到了广泛的应用。
光流法主要依赖于三个假设:
-
亮度恒定:图像中目标的像素强度在连续帧之间不会发生变化。
-
时间规律:相邻帧之间的时间足够短,以至于在考虑运行变化时可以忽略它们之 间的差异。该假设用于导出下面的核心方程。
-
空间一致性:相邻像素具有相似的运动。
对于相邻帧间的小运动以及短时间跳跃,它还是一个非常好的模型,其余多数情况下这些假设并不成立。
光流方程:目标像素在 tt时刻亮度为 I ( x , y , t ) I(x,y,t) I(x,y,t),在 t + δ t t+δt t+δt时刻运动 [ δ x , δ y ] [δx,δy] [δx,δy]后与 t t t时刻具有相同的亮度,即 I ( x , y , t ) = I ( x + δ x , y + δ y , t + δ t ) I(x,y,t)=I(x+δx,y+δy,t+δt) I(x,y,t)=I(x+δx,y+δy,t+δt)。 对该约束用泰勒公式进行一阶展开并关于 t求偏导
▽ I T v = − I t ▽I^{T}v=−It ▽ITv=−It
利用calcOpticalFlowFarneback()在视频中寻找运动矢量:
# -*- coding: utf-8 -*-
import cv2
import numpy as np
from pylab import *
from PIL import Image
def draw_flow(im,flow,step=16):
""" 在间隔分开的像素采样点处绘制光流 """
h,w = im.shape[:2]
y, x = mgrid[step / 2:h:step, step / 2:w:step].reshape(2, -1).astype(int)
fx, fy = flow[y, x].T
# 创建线的终点
lines = vstack([x,y,x+fx,y+fy]).T.reshape(-1,2,2)
lines = int32(lines)
# 创建图像并绘制
vis = cv2.cvtColor(im, cv2.COLOR_GRAY2BGR)
for (x1, y1), (x2, y2) in lines:
cv2.line(vis, (x1, y1), (x2, y2), (0, 255, 0), 1)
cv2.circle(vis, (x1, y1), 1, (0, 255, 0), -1)
return vis
#设置视频捕获
cap = cv2.VideoCapture(0)
ret,im = cap.read()
prev_gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
while True:
# 获取灰度图像
ret,im = cap.read()
gray = cv2.cvtColor(im,cv2.COLOR_BGR2GRAY)
# 计算流
flow = cv2.calcOpticalFlowFarneback(prev_gray,gray,None,0.5,3,15,3,5,1.2,0)
prev_gray = gray
# 画出流矢量
cv2.imshow('Optical flow',draw_flow(gray,flow))
if cv2.waitKey(10) == 27:
break
处理效果:
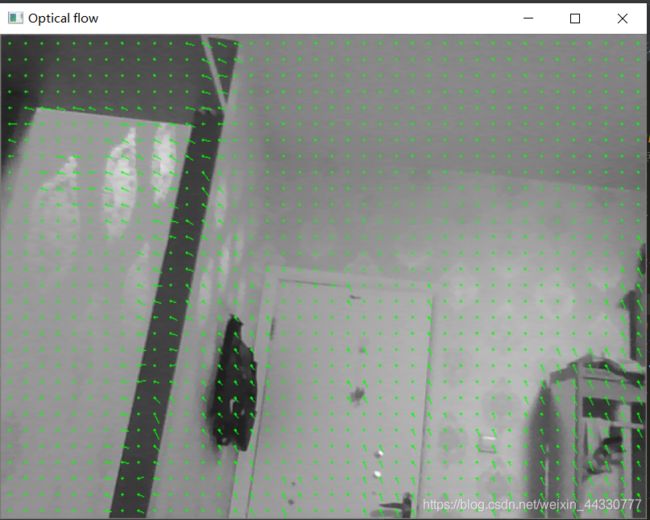
说明:
利用摄像头捕获图像,并对每个连续图像对进行光流估计。由于calcOpticalFlowFarneback() 返回的运动光流矢量保存在双通道图像变量 flow 中。
除了需要获取前一帧和当前帧,该函数还需要一系列参数。辅助函数 draw_flow() 会在图像均匀间隔的点处绘制光流矢量, 它利用 OpenCV 的绘图函数 line() 和 circle(),并用变量 step 控制流样本的间距。 最终的结果上图所示:圆环网格表示流样本的位置,带有线条的流矢量显示了每个样本点是怎样运动的。
4.2 Lucas-Kanade算法
跟随感兴趣点是跟踪最基本的形式,比如角点。Lucas-Kanade 跟踪算法可以应用于任何一种特征,不过通常使用一些角点,角点是结构张量(Harris 矩阵)中有两个较大特征值的那些点,且更小的特征值要大于某个阈值。
如果基于每一个像素考虑,该光流方程组是欠定方程,即每个方程中含很多未知变量。利用相邻像素有相同运动这一假设,对于 n 个相邻像素,可以将这些方程写成如下系统方程:
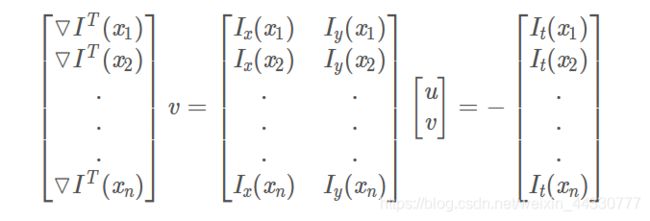
系统方程的优势是,现在方程的数目多于未知变量,并且可以用最小二乘法解出该系统方程。对于周围像素的贡献可以进行加权处理,使越远的像素影响越小;高斯权重是一种最常见的选择。将上面的矩阵变换成方程的结构张量形式,可以得出以下关系:标准的 Lucas-Kanade 跟踪适用于小位移;为了能够处理较大位移,需要采用分层的方法。在该情形下,光流可以通过对图像由粗到精采样计算得到。这就是 OpenCV 函数 calcOpticalFlowPyrLK() 要做的事。
这些 Lucas-Kanade 函数包含在 OpenCV 中,创建名为 lktrack.py 的文件,向其添加下面的类和构造函数:
from numpy import *
import cv2
# 一些常数及默认参数
lk_params = dict(winSize=(15,15),maxLevel=2,
criteria=(cv2.TERM_CRITERIA_EPS | cv2.TERM_CRITERIA_COUNT,10,0.03))
subpix_params = dict(zeroZone=(-1,-1),winSize=(10,10),
criteria = (cv2.TERM_CRITERIA_COUNT | cv2.TERM_CRITERIA_EPS,20,0.03))
feature_params = dict(maxCorners=500,qualityLevel=0.01,minDistance=10)
class LKTracker(object):
""" 用金字塔光流 Lucas-Kanade 跟踪类"""
def __init__(self,imnames):
""" 使用图像名称列表初始化 """
self.imnames = imnames
self.features = []
self.tracks = []
self.current_frame = 0
def detect_points(self):
""" 利用子像素精确度在当前帧中检测“利于跟踪的好的特征”( 角点 ) """
# 载入图像并创建灰度图像
self.image = cv2.imread(self.imnames[self.current_frame])
self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)
# 搜索好的特征点
features = cv2.goodFeaturesToTrack(self.gray, **feature_params)
# 提炼角点位置
cv2.cornerSubPix(self.gray,features, **subpix_params)
self.features = features
self.tracks = [[p] for p in features.reshape((-1,2))]
self.prev_gray = self.gray
def track_points(self):
""" 跟踪检测到的特征 """
if self.features != []:
self.step() # 移到下一帧
# 载入图像并创建灰度图像
self.image = cv2.imread(self.imnames[self.current_frame])
self.gray = cv2.cvtColor(self.image,cv2.COLOR_BGR2GRAY)
#reshape() 操作,以适应输入格式
tmp = float32(self.features).reshape(-1, 1, 2)
# 计算光流
features,status,track_error = cv2.calcOpticalFlowPyrLK(self.prev_gray,self.gray,tmp,None,**lk_params)
# 去除丢失的点
self.features = [p for (st,p) in zip(status,features) if st]
# 从丢失的点清楚跟踪轨迹
features = array(features).reshape((-1,2))
for i,f in enumerate(features):
self.tracks[i].append(f)
ndx = [i for (i,st) in enumerate(status) if not st]
ndx.reverse() # 从后面移除
for i in ndx:
self.tracks.pop(i)
self.prev_gray = self.gray
def step(self,framenbr=None):
""" 移到下一帧。如果没有给定参数,直接移到下一帧 """
if framenbr is None:
self.current_frame = (self.current_frame + 1) % len(self.imnames)
else:
self.current_frame = framenbr % len(self.imnames)
def track(self):
""" 发生器,用于遍历整个序列 """
for i in range(len(self.imnames)):
if self.features == []:
self.detect_points()
else:
self.track_points()
#创建一份 RGB 副本
f = array(self.features).reshape(-1,2)
im = cv2.cvtColor(self.image,cv2.COLOR_BGR2RGB)
yield im,f
def draw(self):
""" 用 OpenCV 自带的画图函数画出当前图像及跟踪点,按任意键关闭窗口 """
# 用绿色圆圈画出跟踪点
for point in self.features:
cv2.circle(self.image,(int(point[0][0]),int(point[0][1])),3,(0,255,0),-1)
cv2.imshow('LKtrack',self.image)
cv2.waitKey()
1. 使用跟踪器
初始化一个跟踪对象,对视频序列进行角点检测、跟踪,并画出跟踪结果:
# -*- coding: utf-8 -*-
import lktrack
imnames = ['D:\Python\bt.003.pgm', 'D:\Python\bt.002.pgm', 'D:\Python\bt.001.pgm', 'D:\Python\bt.000.pgm']
# 创建跟踪对象
lkt = lktrack.LKTracker(imnames)
# 在第一帧进行检测,跟踪剩下的帧
lkt.detect_points()
lkt.draw()
for i in range(len(imnames)-1):
lkt.track_points()
lkt.draw()
处理后:



分析:
每次画出一帧,并显示当前跟踪到的点,按任意键会转移到序列的下一帧。
2. 使用发生器
将下面的方法添加到 LKTracker 类:
def track(self):
""" 发生器,用于遍历整个序列 """
for i in range(len(self.imnames)):
if self.features == []:
self.detect_points()
else:
self.track_points()
#创建一份 RGB 副本
f = array(self.features).reshape(-1,2)
im = cv2.cvtColor(self.image,cv2.COLOR_BGR2RGB)
yield im,f
上面的方法创建一个发生器,可以使遍历整个序列并将获得的跟踪点和这些图像以 RGB 数组保存,以方便画出跟踪结果。可以用经典牛津“dinosaur"序列,并画出这些点的跟踪结果 :
# -*- coding: utf-8 -*-
import lktrack
import cv2
import numpy as np
from pylab import *
from PIL import Image
imnames = ['D:\\Python\\chapter10\\bt.003.pgm', 'D:\\Python\\chapter10\\bt.002.pgm', 'D:\\Python\\chapter10\\bt.001.pgm', 'D:\\Python\\chapter10\\bt.000.pgm']
# 用 LKTracker 发生器进行跟踪
lkt = lktrack.LKTracker(imnames)
for im,ft in lkt.track():
print 'tracking %d features' % len(ft)
# 画出轨迹
figure()
imshow(im)
for p in ft:
plot(p[0],p[1],'bo')
for t in lkt.tracks:
plot([p[0] for p in t],[p[1] for p in t])
axis('off')
show()
处理效果:
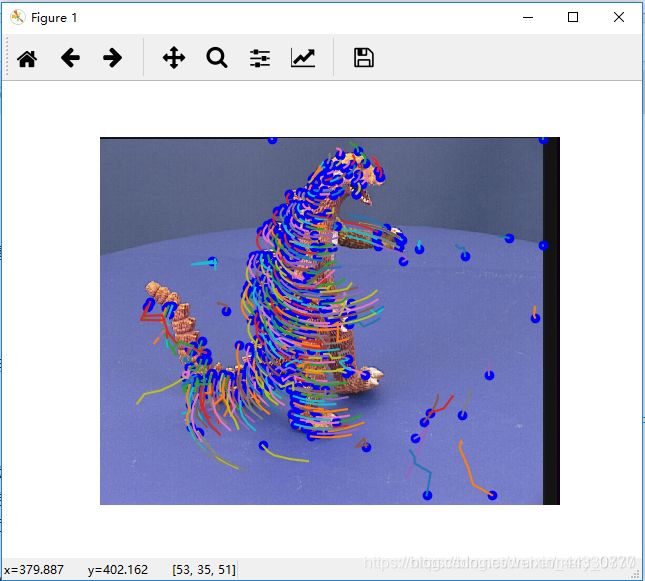
说明:
如上图所示,跟踪点的轨迹被标出。从上面结果显示,输入的轨迹的图像越多,轨迹发生器检测到的跟踪点会越多。不同的图像展示出来的跟踪点轨迹不一样。
(五)更多示例
5.1 图像修复
对图像丢失或损坏的部分进行重建的过程叫做修复,既包括以复原为目的的对图像丢失数据或损坏部分进行恢复的算法,也包括在照片编辑应用程序中去除红眼或物体的算法。
采用cv2模块中的图像修补inpaint,主要提供了两种进行图像修补的算法:
-
基于快速行进算法cv2.INPAINT_TELEA
(考虑图像中要修复的区域。算法从该区域的边界开始,然后进入区域内,逐渐填充边界中的所有内容。它需要在邻近的像素周围的一个小邻域进行修复。该像素由邻居中所有已知像素的归一化加权和代替。选择权重是一个重要的问题。对于靠近该点的那些像素,靠近边界的法线和位于边界轮廓上的像素,给予更多的权重。一旦像素被修复,它将使用快速行进方法移动到下一个最近的像素。
FMM确保首先修复已知像素附近的像素,这样它就像手动启发式操作一样工作。使用标志cv2.INPAINT_TELEA启用此算法。) -
基于流体动力学并使用了偏微分方程cv2.INPAINT_NS
(基本原则是heurisitic。它首先沿着已知区域的边缘行进到未知区域(因为边缘是连续的)。它继续等照片(连接具有相同强度的点的线,就像轮廓连接具有相同高度的点一样),同时在修复区域的边界处匹配渐变矢量。为此,使用来自流体动力学的一些方法。获得颜色后,填充颜色以减少该区域的最小差异。使用标志cv2.INPAINT_NS启用此算法。)
创建一个与输入图像大小相同的掩码,其中非零像素对应于要修复的区域:
# -*- coding: utf-8 -*-
import numpy as np
from matplotlib import pyplot as plt
import cv2
img = cv2.imread('inpainting_pictures\OpenCV_Logo_B.png') # input
mask = cv2.imread('inpainting_pictures\OpenCV_Logo_C.png',0) # mask
dst_TELEA = cv2.inpaint(img,mask,3,cv2.INPAINT_TELEA)
dst_NS = cv2.inpaint(img,mask,3,cv2.INPAINT_NS)
plt.subplot(221), plt.imshow(img)
plt.title('degraded image')
plt.subplot(222), plt.imshow(mask, 'gray')
plt.title('mask image')
plt.subplot(223), plt.imshow(dst_TELEA)
plt.title('TELEA')
plt.subplot(224), plt.imshow(dst_NS)
plt.title('NS')
plt.tight_layout()
plt.show()
处理效果:
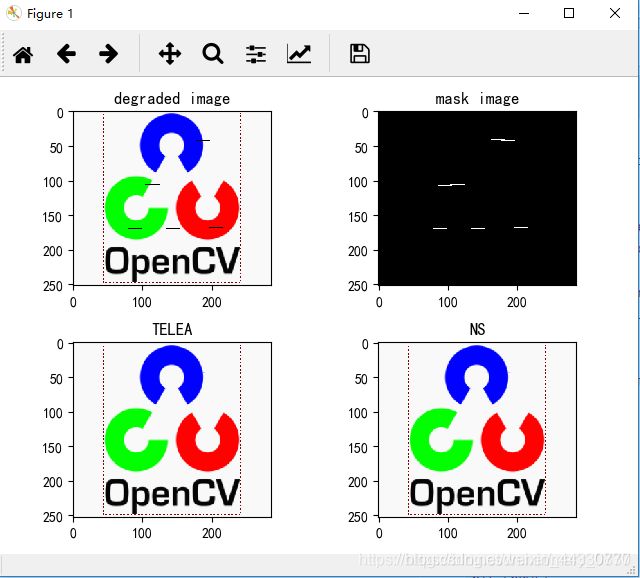
分析:
两种算法修补的结果。从上面的结果看出,两种修补方法之间基本没有任何区别。
5.2 利用分水岭变换进行分割 cv2.watershed()
分水岭是一种可以用于分割的图像处理技术。在地理学中,分水岭是一个山脊,该山脊通过不同的水系来区分排水区域。集水盆地是把水排入河流或水库的地理区域。分水岭变换把这些概念应用到灰度图像处理中,从而解决许多图像分割问题。图像可以看成是一幅有很多种子区域“淹没”后形成的拓扑地貌。由于梯度幅值图像在突出的边缘有脊,而且分割通常在这些边缘处停止,所以通常会用到梯度幅值图像。
原理背景:
任何一幅灰度图像都可以被看成拓扑平面,灰度值高的区域可以被看成是山峰,灰度值低的区域可以被看成是山谷。我们向每一个山谷中灌不同颜色的水,随着水的位的升高,不同山谷的水就会相遇汇合,为了防止不同山谷的水汇合,我们需要在水汇合的地方构建起堤坝。不停的灌水,不停的构建堤坝直到所有的山峰都被水淹没。我们构建好的堤坝就是对图像的分割。
OpenCV 采用了基于掩模的分水岭算法,在这种算法中我们要设置那些山谷点会汇合,那些不会。这是一种交互式的图像分割。我们要做的就是给我们已知的对象打上不同的标签。如果某个区域肯定是前景或对象,就使用某个颜色(或灰度值)标签标记它。如果某个区域肯定不是对象而是背景就使用另外一个颜色标签标记。而剩下的不能确定是前景还是背景的区域就用 0 标记。这就是我们的标签。然后实施分水岭算法。 每一次灌水,我们的标签就会被更新,当两个不同颜色的标签相遇时就构建堤坝,直到将所有山峰淹没,最后我们得到的边界对象(堤坝)的值为 -1。
示例:
# -*- coding: utf-8 -*-
import numpy as np
import cv2
from matplotlib import pyplot as plt
img = cv2.imread('D:\Data\school.jpg')
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, thresh = cv2.threshold(gray,0,255,cv2.THRESH_BINARY_INV+cv2.THRESH_OTSU)
#cv2.imshow('ret',thresh)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
# noise removal
kernel = np.ones((3,3),np.uint8)
opening = cv2.morphologyEx(thresh,cv2.MORPH_OPEN,kernel, iterations = 2) # 形态开运算
# sure background area
sure_bg = cv2.dilate(opening,kernel,iterations=3)
# Finding sure foreground area
dist_transform = cv2.distanceTransform(opening,cv2.DIST_L2,5)
ret, sure_fg = cv2.threshold(dist_transform,0.7*dist_transform.max(),255,0)
# Finding unknown region
sure_fg = np.uint8(sure_fg)
unknown = cv2.subtract(sure_bg,sure_fg)
# Marker labelling
ret, markers = cv2.connectedComponents(sure_fg)
# Add one to all labels so that sure background is not 0, but 1
markers = markers+1
# Now, mark the region of unknown with zero
markers[unknown==255] = 0
markers = cv2.watershed(img,markers)
img[markers == -1] = [255,0,0]
#cv2.imshow('img',img)
#cv2.waitKey(0)
#cv2.destroyAllWindows()
plt.subplot(421), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)),
plt.title('original'), plt.axis('off')
plt.subplot(422), plt.imshow(thresh, cmap='gray'),
plt.title('threshold'), plt.axis('off')
plt.subplot(423), plt.imshow(sure_bg, cmap='gray'),
plt.title('dilate'), plt.axis('off')
plt.subplot(424), plt.imshow(dist_transform, cmap='gray'),
plt.title('distanceTransform'), plt.axis('off')
plt.subplot(425), plt.imshow(sure_fg, cmap='gray'),
plt.title('threshold'), plt.axis('off')
plt.subplot(426), plt.imshow(unknown, cmap='gray'),
plt.title('subtract'), plt.axis('off')
plt.subplot(427), plt.imshow(np.abs(markers), cmap='jet'),
plt.title('mMarkers'), plt.axis('off')
plt.subplot(428), plt.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB)),
plt.title('result'), plt.axis('off')
plt.show()
处理效果:

分析:
使用形态关闭来删除物体中的任何小孔 。 提取需要的主体(房子)的区域,侵蚀去除边界像素。 边界通常位于前景和背景相遇的区域,可以从sure_bg区域中减去sure_fg区域获得。看到结果,在阈值图像中,已经得到建筑的区域,这是试验中的主体部分,现在它们已经分离。现在已经把前景和背景分离开, 所以现在创建标记(它是一个与原始图像大小相同的数组,但是使用int32数据类型),并标记它内部的区域。 无论是前景还是背景都被标记为任何正整数,但是不同的整数,不确定的区域只能保持为零。
5.3 利用霍夫变换检测直线
霍夫变换利用点和线之间的对偶性,将图像空间中直线上离散的像素点通过参数方程映射为霍夫空间的曲线,并将霍夫空间中多条曲线的交点作为直线方程的参数映射为图像空间的直线。
OpenCV提供了两种用于直线检测的Hough变换形式。其中基本的版本是cv2.HoughLines。其输入一幅含有点集的二值图(由非0像素表示),其中一些点互相联系组成直线。
霍夫变换检测直线:
# -*- coding: utf-8 -*-
import cv2 as cv
import numpy as np
img = cv.imread("D:\Data\school.jpg")
cv.imshow('img', img)
gray = cv.cvtColor(img, cv.COLOR_BGR2GRAY)
edges = cv.Canny(gray, 50, 150, apertureSize=3)
cv.imshow('edge', edges)
# 计算直线
lines = cv.HoughLines(edges, 1, np.pi / 180, 180)
tmp = img.copy()
for line in lines:
rho, theta = line[0]
a = np.cos(theta)
b = np.sin(theta)
x0 = a * rho
y0 = b * rho
x1 = int(x0 + 1000 * (-b))
y1 = int(y0 + 1000 * (a))
x2 = int(x0 - 1000 * (-b))
y2 = int(y0 - 1000 * (a))
cv.line(tmp, (x1, y1), (x2, y2), (0, 0, 255), 4)
cv.imshow('line', tmp)
# 直接获取线段
lines = cv.HoughLinesP(edges, 1, np.pi / 180, 100, minLineLength=100, maxLineGap=10)
tmp = img.copy()
for line in lines:
x1, y1, x2, y2 = line[0]
cv.line(tmp, (x1, y1), (x2, y2), (0, 0, 255), 4)
cv.imshow('line2', tmp)
cv.waitKey(0)
cv.destroyAllWindows()
处理效果:

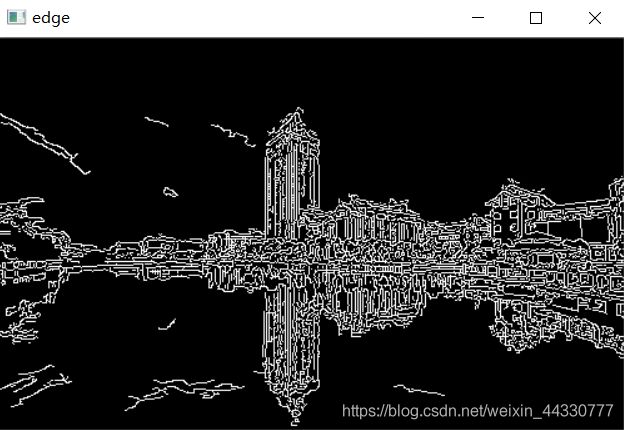
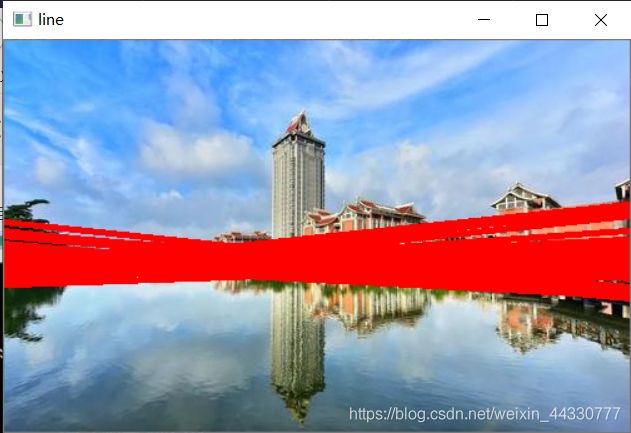
 分析:
分析:
利用霍夫变换检测直线的结果中,第一幅图显示的是灰度的原图像,第二幅图显示的是检测出角点的图像,第三幅图是检测到直线的图像,第四幅图检测到线段的图像。这个算法的不足是:有些直线或者线段并不能完全的检测出来。比如说,尚大楼竖横线在线段检测或者直线检测都没有能够检测出来。