【51单片机】汽车里程表之测速功能

文章目录
- 设计说明
- 流程图
- 主要代码
设计说明
以通用MCS-51单片机为处理核心,用传感器将车轮的转数转换为电脉冲,进行处理后送入单片机。里程及速度的测量,是经过MCS-51的定时/计数器测出总的脉冲数和每转一圈的时间,再经过单片机的计算得出,其结果通过LED显示器显示出来。
里程表可以在淘宝上买到成品,我的思路是在成品的基础上,把电机的电流引到里程表上;除了测速功能外,还可以再加上控速功能,在速度超过某一个固定值后,蜂鸣器响,提示需要减速,同时通过串口发送标志位给汽车模块,汽车模块根据标志位,控制汽车的PWM占空比,进行减速。
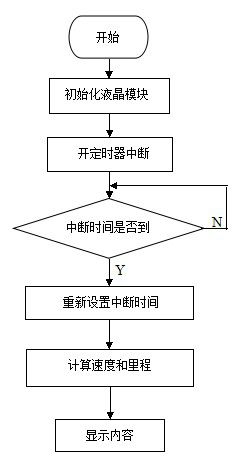
流程图
计算速度和里程模块:
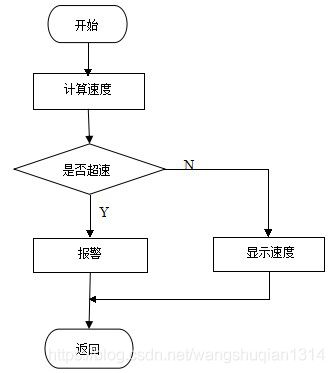
报警和测速模块:
主要代码
/***********计算速度函数**************/
void menu_dis() //计算速度函数
{
static uchar value;
if(menu_1 == 0)
{
if(flag_1s == 1)
{
flag_1s = 0;
if(flag_en == 0)
{
value ++;
if(value >= 3) //2秒
{
speed_km = 0; //速度为0
shudu = (uint)speed_km;
value = 0;
}
}
if((flag_en == 1))
{
value = 0;
flag_en = 0;
//1s = 1 / 1000000us; // 1m/s=0.001km除以1/3600h=3.6km/h
f_hz = 1/(t2_num * 65536.0 + TH11 * 256 + TL11) / 1000000 ; //算出来就是秒
t2_num = 0; //把变量清零
TH11 = 0;
TL11 = 0;
speed_m = f_hz * zhijing * 3.14 ; //算出来的是m/s
juli_z = (juli_z + (uint)speed_m) ; //总路程m
speed_km = speed_m * 3.6 ; //(带个小数点) km/s
shudu = (uint)speed_km;
zong_lc += speed_m;
}
write_sfm2(1,3,shudu);
write_sfm4(2,3,juli_z);
}
}
}
/********************独立按键程序*****************/
uchar key_can; //按键值
void key() //独立按键程序
{
static uchar key_new;
key_can = 20; //按键值还原
P3 |= 0x78; //对应的按键IO口输出为1
if((P3 & 0x78) != 0x78) //按键按下
{
delay_1ms(1); //按键消抖动
if(((P3 & 0x78) != 0x78) && (key_new == 1))
{
//确认是按键按下
key_new = 0;
switch(P3 & 0x78)
{
case 0x70: key_can = 4; break; //得到按键值
case 0x68: key_can = 3; break; //得到按键值
case 0x58: key_can = 2; break; //得到按键值
case 0x38: key_can = 1; break; //得到按键值
}
}
}
else
key_new = 1;
}
/**********************设置函数************************/
void key_with()
{
if(key_can == 1) //设置键
{
menu_1++;
if(menu_1 == 1) //设置时间
{
menu_2 = 1;
write_string(1,0," : : W: ");
write_string(2,0," 20 - - ");
}
if(menu_1 == 2) //设置报警速度
{
menu_2 = 1;
write_string(1,0,"set-sd:00km/h ");
write_string(2,0,"zlc: ");
}
if(menu_1 == 3) //设置直径
{
menu_2 = 1;
write_string(1,0," Set Zhijing ");
write_string(2,0," ");
}
menu_2 = 1;
if(menu_1 > 3) //回到正常显示
{
menu_1 = 0;
write_guanbiao(1,2,0); //关闭光标
init_1602(); //1602初始化 //初始化液晶显示
}
}
if(key_can == 2) //选择键
{
if(menu_1 == 1) //设置时间
{
menu_2 ++;
if(menu_2 > 7)
menu_2 = 1;
}
if(menu_1 == 2) //设置
{
menu_2 ++;
if(menu_2 > 2)
menu_2 = 1;
}
}
if(menu_1 == 1)
{
if(menu_2 == 1) //设置时
{
if(key_can == 3) //加
{
shi+=0x01;
if((shi & 0x0f) >= 0x0a)
shi = (shi & 0xf0) + 0x10;
if(shi >= 0x24)
shi = 0;
}
if(key_can == 4) //减
{
if(shi == 0x00)
shi = 0x24;
if((shi & 0x0f) == 0x00)
shi = (shi | 0x0a) - 0x10;
shi -- ;
}
}
if(menu_2 == 2) //设置分
{
if(key_can == 3) //加
{
fen+=0x01;
if((fen & 0x0f) >= 0x0a)
fen = (fen & 0xf0) + 0x10;
if(fen >= 0x60)
fen = 0;
}
if(key_can == 4) //减
{
if(fen == 0x00)
fen = 0x5a;
if((fen & 0x0f) == 0x00)
fen = (fen | 0x0a) - 0x10;
fen -- ;
}
}
if(menu_2 == 3) //设置秒
{
if(key_can == 3) //加
{
miao+=0x01;
if((miao & 0x0f) >= 0x0a)
miao = (miao & 0xf0) + 0x10;
if(miao >= 0x60)
miao = 0;
}
if(key_can == 4) //减
{
if(miao == 0x00)
miao = 0x5a;
if((miao & 0x0f) == 0x00)
miao = (miao | 0x0a) - 0x10;
miao -- ;
}
}
if(menu_2 == 4) //设置星期
{
if(key_can == 3) //加
{
week+=0x01;
if((week & 0x0f) >= 0x0a)
week = (week & 0xf0) + 0x10;
if(week >= 0x08)
week = 1;
}
if(key_can == 4) //减
{
if(week == 0x01)
week = 0x08;
if((week & 0x0f) == 0x00)
week = (week | 0x0a) - 0x10;
week -- ;
}
}
if(menu_2 == 5) //设置年
{
if(key_can == 3) //加
{
nian+=0x01;
if((nian & 0x0f) >= 0x0a)
nian = (nian & 0xf0) + 0x10;
if(nian >= 0x9a)
nian = 1;
}
if(key_can == 4) //减
{
if(nian == 0x01)
nian = 0x9a;
if((nian & 0x0f) == 0x00)
nian = (nian | 0x0a) - 0x10;
nian -- ;
}
}
if(menu_2 == 6) //设置月
{
if(key_can == 3) //加
{
yue+=0x01;
if((yue & 0x0f) >= 0x0a)
yue = (yue & 0xf0) + 0x10;
if(yue >= 0x13)
yue = 1;
}
if(key_can == 4) //减
{
if(yue == 0x01)
yue = 0x13;
if((yue & 0x0f) == 0x00)
yue = (yue | 0x0a) - 0x10;
yue -- ;
}
}
if(menu_2 == 7) //设置日
{
if(key_can == 3) //加
{
ri+=0x01;
if((ri & 0x0f) >= 0x0a)
ri = (ri & 0xf0) + 0x10;
if(ri >= 0x32)
ri = 0;
}
if(key_can == 4) //减
{
if(ri == 0x01)
ri = 0x32;
if((ri & 0x0f) == 0x00)
ri = (ri | 0x0a) - 0x10;
ri -- ;
}
}
write_sfm2_ds1302(1,2,shi); //显示时
write_sfm2_ds1302(1,5,fen); //显示分
write_sfm2_ds1302(1,8,miao); //显示秒
write_sfm1(1,14,week); //显示星期
write_sfm2_ds1302(2,3,nian); //显示年
write_sfm2_ds1302(2,6,yue); //显示月
write_sfm2_ds1302(2,9,ri); //显示日
switch(menu_2) // 光标显示
{
case 1: write_guanbiao(1,2,1); break;
case 2: write_guanbiao(1,5,1); break;
case 3: write_guanbiao(1,8,1); break;
case 4: write_guanbiao(1,14,1); break;
case 5: write_guanbiao(2,3,1); break;
case 6: write_guanbiao(2,6,1); break;
case 7: write_guanbiao(2,9,1); break;
}
write_time(); //把时间写进去
}
if(menu_1 == 2)
{
if(menu_2 == 1) //设置速度
{
if(key_can == 3) //加
{
bj_shudu++;
if(bj_shudu >= 99)
bj_shudu = 99;
}
if(key_can == 4) //减
{
if(bj_shudu != 0)
bj_shudu -- ;
}
}
if(menu_2 == 2) //把总量程清零
{
if(key_can == 3)
{
zong_lc= 0;
}
if(key_can == 4)
{
zong_lc= 0;
}
}
write_sfm2(1,7,bj_shudu); //显示报警速度
write_sfm7(2,4,zong_lc); //显示
switch(menu_2) // 光标显示
{
case 1: write_guanbiao(1,6,1); break;
case 2: write_guanbiao(2,3,1); break;
}
}
if(menu_1 == 3)
{
if(key_can == 3) //加
{
s_zhijing++;
if(s_zhijing >= 999)
s_zhijing = 999;
}
if(key_can == 4) //减
{
if(s_zhijing != 0)
s_zhijing -- ;
}
zhijing = s_zhijing ;
write_sfm2(2,5,s_zhijing); //显示
}
}
/****************报警函数***************/
void clock_h_l()
{
static uchar value;
if((shudu >= bj_shudu))
{
value ++; //消除实际距离在设定距离左右变化时的干扰
{
beep = ~beep; //蜂鸣器报警
}
}
else
{
beep = 1;
}
}
/******************主程序**********************/
void main()
{
init_1602(); //1602初始化
init_int0();
time_init(); //定时器0初始化程序
while(1)
{
// shudu = 11;
key(); //按键程序
if(key_can < 10)
{
key_with();
}
if(flag_200ms == 1)
{
flag_200ms = 0;
read_time(); //读时间
init_1602_ds1302(); //显示时钟
menu_dis(); //计算速度函数
clock_h_l(); //报警函数
}
}
}
/*********************外部中断0中断服务程序************************/
void int0() interrupt 0
{
static uchar value=1;
switch(value)
{
case 0:
t1_num = 0; //第一次就把变量清零
TH1 = 0;
TL1 = 0;
break;
case 1:
t2_num = t1_num; //保存
TH11 = TH1;
TL11 = TL1;
flag_en = 1;
break;
}
}
/*************定时器0中断服务程序***************/
void time0_int() interrupt 1
{
static uchar value=1;
TH0 = 0x3c;
TL0 = 0xb0; // 50ms
value++;
if(value % 4 == 0)
flag_200ms = 1;
if(value >= 20) //1秒 才是一秒钟的速度
{
value = 0;
flag_1s = 1;
}
}
/*************定时器1中断服务程序***************/
void time1_int() interrupt 3
{
t1_num++;
}