abaqus单位_ABAQUS约定相关
――――每种软件在顺利运行中都有自己的一套在诸如单位、符号、变量值表示等方面的约定用法,如果想用此种软件进行适合自己的分析,自己进行主观操作之外,对它的这种约定我们也要提起注意,否则很容易产生我们觉察不到的问题。
- 自由度
- 坐标系统
- 单位
- 时间尺度
- 曲面方向
- 应力与应变
- 旋转
==1==自由度
Abaqus中对单位的认定与其他软件(如ANSYS)稍微有点不同就在于默认情况下abaqus是以1、2、3等数字来表示各种自由度的标符的,在手写inp中,只能以它们表示自由度。
●除了轴对称单元(.ax..)以外,其它单元对自由度进行如下约定:
- x方向(平动自由度)
- y方向。。。
- z方向。。。
- 绕x轴旋转的旋转自由度(以弧度表示)
- 绕y。。。
- 绕z。。。
- 翘曲(对于开口截面梁单元)
- 孔隙压力(或静水压)
- 电势
11.温度(或质量扩散分析中的归一化浓度)
12. 第二温度(对于壳、梁)
13. 第三温度。。。
14. 其他
其中,x、y、z默认情况下是分别与系统的整体坐标系X、Y、Z相一致的,但如果使用*Transform对结点进行局部坐标系转化的话,那么它们将与局部坐标系中的相关坐标轴一致。
- 对轴对称单元的平动与旋转自由度如下规定:
- r方向(径向)位移
- z方向(轴向)位移
- 绕z轴旋转(用于带扭曲的轴对称单元),以弧度表示
- r-z平面的旋转(用于轴对称壳单元),以弧度表示
用*transform进行结点坐标系转换的自由度改变同上。
- 可用的自由度
上述所列自由度并不是同时都能用在某一单元结点上的,不同的分析,不同的单元自会有适合其分析的自由度,而其他则在此是失效的。 - ABAQUS/Standard中的内部变量
除了上述所列的自由度外,ABAQUS/Standard对某些单元还内定了内部‘自由度‘变量(如用于施加约束的拉格朗日乘子),一般情况下,使用ABAQUS分析并不需要去了解这些变量,但在进行分析过程中,当迭代中对非线性约束的满足进行检验时常用到这些内部变量,这从msg文件中的错误警告信息中可以看到。内变量与内部结点相关,内部结点在ABAQUS中为系统分析所用,以负的结点号出现以别于我们所定义的结点。
==2==坐标系
同一般规定一样,ABAQUS采用的基本坐标系(系统整体坐标系)是直角坐标系,方向遵循右手法则。为便于各种分析,用户可以自行定义局部坐标系以便于建模、定义材料、定义载荷以及变量输出等。
建模中,常在node/ngen中加入*system
材料中,常以*orientation进行定义局部坐标系(尤其对于壳、梁单元)
载荷中,用*transform可以定义局部坐标系下的载荷
输出中,先前定义的*transform(用于结点变量)与*orientation可以发挥作用。
==3==单位
实际上,ABAQUS没有单位的概念,它仅是通过有限元方法对矩阵进行数学运算得到结果,理论上没有什么物理意义,但各种变量从人为地角度赋与物理意义以及物理定理的数学表示,从而发动ABAQUS进行求解出‘有意义的‘的结果来,由此看来,结果是否有效,人对各种数据变量的主观把握是重要的。单位的一致性可以保证结果运算不会产生与之相关的问题。一般,ABAQUS建议用一套认可的单位制进行单位定义,比方说,国际单位制。当然,如果你原意通过一系列的转化(转化因子可能复杂)的话,可以不遵守单位一致性的约定。()
- 旋转及角度表示
ABAQUS中,旋转自由度(4、5、6)以弧度来表示,而其他角度相关的一般都以真实角度表示(如相角、*ncopy,shift中的旋转角度),其实,便于好记的说法就是,与长度或三角运算相关的用弧度,与旋转相关的用角度表示。(个人理解) - 国际单位制
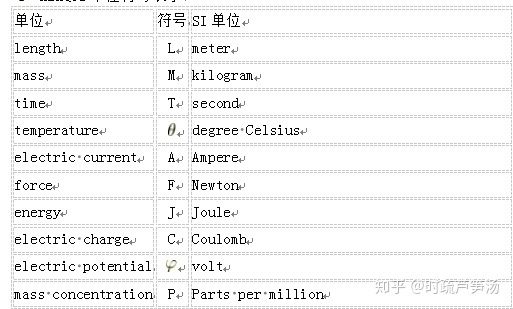
国际单位制是我们最常用的一套符合一致性要求的单位系统(SI)。其基本的单位共五个:长度(m),质量(kg)、时间(s)、温度(K)、电流(A)。其他相关单位均在此单位基础上组合或推导出来。如力,其单位为牛顿(N):
类似地,库伦在国际单位制中为:
焦耳(J):
电势在国际单位制中为伏特(V),其单位标准为:
然而,有时国际标准单位在分析中使用并不方便。比如说,结构分析中常用到的杨氏模量,其单位常用为MPa(=N/mm^2),此时,为单位一致,与之相对应的其他基本单位应为(1吨=1000KG、千米、秒)。
- 美(英)式单位
对我们而言,总是不太习惯使用美式或英式单位制,这是因为其单位命名规则不像国际单位制中的表示的那样清楚。比方说,1磅力等于1磅质量(lbm)乘以重力加速度
(单位为
)。如果以磅力、英尺(ft)和秒作为基本单位的话,则质量lbm可以表示为:
。但在一般情况下,密度的单位为
,所以若要以上述基本单位表示的话,就必须转化为:
而且,从手册中也容易让我们在lb倒底代表的是lbm还是lbf而感到模糊。我们必须通过查看其由哪些单位组成推导出才能确认是什么。
另外,难理解的还有两个单位,一个是斯(勒格)-slug(=lbf sec^2/ft),其被定义为在受到一磅重的力作用时产生每秒钟一英尺的加速度的质量单位。被定义为使质量1磅的质点发生1尺/秒加速度的力。以下两个有用的转化为:
和
这里g为重力加速度值单位为:
- ABAQUS单位符号表示
==4==时间
ABAQUS共有两种时间计法,一种是步时间(step time)另一种是总分析时间(total time)。除了线性扰动分析(它不考虑时间),步时间是从每一分析步开始计算,而总分析时间则是从第一个step开始计算起的所有step的时间积累(包括*restart步)。
==5==关于空间曲面的局部方向
完全的空间曲面定义需要有局部面方向的定义以完成定义诸如基于单元接触曲面的切向滑移方向或是壳单元的应力应变方向。对此类方向ABAQUS作如下规定:
默认的局部1方向是整体x轴向曲面的投影,如果该x轴垂直于曲面(与曲面法线夹角小于0.1度),其局部1方向是整体z轴向曲面的投影。而局部2方向则是局部1方向依右手法则形成,故而局部1、2和曲面的正法线的构形局部坐标轴方向(依右手法则)。如下图。曲面的正法线方向是通过构成该单元的结点以右手法则旋转而成。局部曲面方向可以通过*orientation定义。

当考虑垫片单元或与*section print和*section file相关的局部坐标系统定义时,曲面的局部1-、2-方向变成局部2-、3-方向。
对于线型单元如梁beam、管pipe、杆truss的空间方向,其默认的局部1-方向和2-方向该单元的切向与横向(其具体方向与结点定义顺序有关),当然也可以通过*orientation进行修改。
- 局部旋转方向
对于几何线性分析而言,以默认的材料方向(初始参考中定义)就可以将应力应变表示出来。
对于几何非线性分析,在ABAQUS/Standard中的小应变壳单元(S4R5, S8R, S8R5, S8RT, S9R5, STRI3, 和 STRI65)使用总体拉格朗日应变算法,应力应变可以相对于参考构型的材料方向改定。垫片单元是小应变小位移单元,默认情况下其应力应变值也是以初始参考构型定义的行为方向输出。
对于有限膜应变单元(所有的膜单元以及S3/S3R, S4, S4R, SAX,和 SAXA单元)和在ABAQUS/Explicit中的小应变单元,其材料方向是随着曲面的平均刚性旋转运动而变以形成当前构型的材料方向。此时这些单元的应力应变则是根据当前的参考构型中的材料方向给出的。(更详细地说明可以参考ABAQUS相关手册)。用户可以决定与*section print和*section file相关的局部坐标系统是固定不动还是随着曲面的平均刚性运动而旋转。
==6==应力应变的规定
在定义材料特性时,在ABAQUS中应力应变的各个分量定义如下顺序:
:1-方向的正应力
:2方向的正应力
:3方向的正应力
:1-2面的剪应力
:1-3方向的剪应力
:2-3方向的剪应力
比如,一个完全各向异性、线弹性矩阵为:
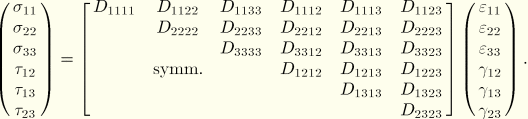
1-、2-和3-方向的确定依靠所选择的单元类型。对于实体单元就是整体坐标系的空间方向。对于壳单元和膜单元,1-、2-方向默认上是壳或膜曲面的局部方向。可以通过*orientation对三个方向进行适合自己分析的修改。
对于实体单元的几何非线性分析,默认的方向并不会随着材料的旋转而变化。然而,如果通过*orientation定义的方向则会旋转。
ABAQUS/Explicit在分析中,在内部以不同的顺序完成对各应力的存储。对于几何非线性分析,无论是否使用*orientation,这些被存储的变量总是随着材料的方向旋转的,这一点在子程序VUMAT被使用时尤显重要。
- 各向异性材料行为
在连续体单元中定义各向异性材料行为时,用*orientation所定义的材料方向是很重要且必要的。 - 零值应力
在分析中,如果应力值一直为零,在矩阵存储时将被忽略。例如,对于平面应力分析,ABAQUS仅存储两个面内的正应力和一个面内的剪应力。 - 剪应变
ABAQUS输出工程剪应变
:
- 应力应变测量
在ABAQUS中,应力使用的是柯西应力(?)或真实应力值,即每单位当前面积上的应大小。详细地请看手册。“Stress measures,” Section 1.5.2 of the ABAQUS Theory Manual。
对于几何非线性分析,存在多种不同的应变计量方法。不像‘真实’应力,它没有很清楚的真实应变的计法。对同一种物理变形,在大应变分析中不同的应变测量方法会给出不同的应变值,当然其值所能反应的实际性也就不同。如何选择最好的应变测量方法,这依靠分析类型、材料行为以及在一定程度上也依靠个人喜好!详见“Strain measures,” Section 1.4.2 of the ABAQUS Theory Manual
默认情况下,在ABAQUS/Standard中应变以“综合”总应变(E)输出,对于大应变的壳、膜和实体单元,还有两种其他的总应变计法可以输出:自然应变(LE)和公称应变(NE)。
在ABAQUS/Explicit中,自然应变(LE)是默认的应变输出,也可以要求公称应变输出。而“综合”应变在ABAQUS/Explicit中是无法得到的。 - 总(综合)应变
默认情况下,ABAQUS/Standard输出到.dat文件和.fil文件的应变为综合应变,这是对于所有可以在材料体下将应变率数值积分获得有限应变的单元都适用的:
,其中
和
分别是分析中第n+1次和第n次的总应变,
为旋转张量的增量,
为从第n次增量到第n+1次增量的总应变增量。对于使用正转坐标系统(右手法则)的单元(使用*orientation有限应变壳单元、膜单元和实体单元)上式可以简化为:
应变增量可以通过对变形率D在整个时间增量上积分得到:
这种应变计法对于弹塑性(粘弹性材料)或弹性-蠕变材料都是适合的,这是因为塑性应变和蠕变应变都是通过相同的积分方式得到的。在这样的材料里,弹性应变是很小的(因为屈服应力相对于弹模来说是较小的),此时总(综合)应变可以直接地与塑性应变和蠕变应变相对比!
如果应变的主方向关于材料方向的变化而旋转变化的,那么最后所得到的应变是不能和总变形相联系的,此时无论采用的是何种坐标系统。如果主应变方向保持固定,那么应变就是变形率的积分:
这与稍后将要讨论的自然应变等效。
- 格林应变
在ABAQUS/Standard中,对于小应变壳和梁单元,默认的应变计法E为格林应变:
此时,F为变形适量梯度而I为特征张量。这种应变计法适合于在小应变、大旋转分析中使用这些单元。分量
代表沿原定义方向的应变,不能在有弹塑性或超弹性材料行为的有限应变分析中使用小应变壳和梁单元,因为可能会导致不正确的分析结果!
●公称应变
公称应变NE被定义为:
其中,
为左拉伸张量,
为主拉伸,
为在当前材料参数下的主拉伸方向。因此,主公称应变也就是在主材料参数方向下长度变化对原长度的比值,从而直观地解释了变形。
●自然应变
自然应变LE被定义为:
(式中变量同上)。
- 应力不变量
在ABAQUS中许多结构模型都是根据应力不变量进行阐述的,这些应力不变量为:
等效压应力:
Mises等效应力:
第三偏应力不变量:
这中间,S为偏应力,被定义成:
==七==有限旋转
空间中,对于有限旋转作如下规定:定义
、
、
为关于整体X、Y和Z轴的旋转量(也就是指在一个节点的4、5、6自由度)。
定义
,其中
,方向P为旋转同方向,
为右手法则得出的旋转角度(弧度表示),见下图。
值不是唯一确定的。在大旋转问题中,如果总旋转量超过
,可以加或减任意倍的
(以得到在
内的值),而这可能会导致旋转分量的不连续输出。

这个规则提供了在大多数分析中对于运动边条和弯矩的简便输入以及输出的简单解释。由ABAQUS产生的对旋转的输出代表的是关于一固定轴从原参考构型到当前构型的旋转。此输出不同于对结点的旋转历史输出。而且,这个规则成为了小旋转分析甚至是施加到初始有限旋转上的小旋转情况(这种情况可在关于一个预变形状态下小振动研究考虑)最通常的规则。
●组合旋转
因为有限旋转的方向性,它不是累积的,它们被指定的方式与其它种边条被指定的方式有所不同:在整个step上指定的旋转增量必须是从分析步开始的构型到该步末所需要的构型旋转结点所需要的旋转量。对于总旋转量,在分析中它将结点旋转到最终的位置,但如果它是在其他的几个初始参考构型中施加的,那么在一个分析步中就使结点旋转到总量来说是不够的(也可以说是不正确的)。如果对于某结点施加的一个旋转增量
是在该分析步开始(也就是上一分析步结束时)时使该结点从其旋转边界条件旋转并最终在该步结束时到其最终位置的话,那么在该步末的模型此结点的边界条件诸如旋转向量就应该是
。如果旋转向量的方向保持不变,那么定义旋转边条和总旋转向量的方法是相同的。
下面以梁的旋转为例来说明如何指定组合有限旋转以及说明有限旋转输出:
梁最初位一x轴上,现在想进行如相复合旋转:最行使梁绕z轴旋转旋转60度,随后梁自旋(以自己梁轴)90度,最后使梁绕在x-y平面内垂直于梁体的轴旋转90度。
该分析的组合旋转分为三步,分别施加旋转微量
、
和
,其中:

在这个例子中,
、
和
。这里
代表每一个绕旋转轴有限旋转的大小。上述的三个旋转向量分别在第一个步开始的构型定义时施加。用*Boundary,type=velocity可以很简便地进行定义。为方便起见,在ABAQUS中对于velocity类型的边条其默认的amplitude值为常量。
如下为一个典型的ABAQUs分析步,将结点1固定在原点而将旋转加于结点2上:
STEP, NLGEOM
Step 1: Rotate 60 degrees about the z-axis
*STATIC
*BOUNDARY, TYPE=VELOCITY
2, 4, 5
2, 6, 6, 1.047198
*END STEP
**
*STEP, NLGEOM
Step 2: Rotate 90 degrees about the beam axis
*STATIC
*BOUNDARY, TYPE=VELOCITY
2, 4, 4, 0.785398
2, 5, 5, 1.36035
2, 6, 6
*END STEP
**
*STEP, NLGEOM
Step 3: Rotate beam onto z-axis
*STATIC
*BOUNDARY, TYPE=VELOCITY
2, 4, 4, 1.36035
2, 5, 5, -0.785398
2, 6, 6
*END STEP
推荐使用上述方示施加有限旋转边界条件(*boundary,type-velocity为默认的amplitude定义类型)。然而,如果旋转边条是作为位移类型边条加载的话,上面的输入格式需要进行改变,在ABAQUS/Standard中,对于某一分析步的边条是在分析步内定义整体或该步最终的边界状态。这种情况下,所有以前分析步中所指定的边条必须要被添加到增量的旋转向量分量上。ABAQUS/Standard的分析步定义将变为:
*STEP, NLGEOM
Step 1: Rotate 60 degrees about the z-axis
*STATIC
*BOUNDARY
2, 4, 5
2, 6, 6, 1.047198
*END STEP
**
*STEP, NLGEOM
Step 2: Rotate 90 degrees about the beam axis
*STATIC
*BOUNDARY
2, 4, 4, 0.785398
2, 5, 5, 1.36035
2, 6, 6, 1.047198
*END STEP
**
*STEP, NLGEOM
Step 3: Rotate beam onto z-axis
*STATIC
*BOUNDARY
2, 4, 4, 2.145748
2, 5, 5, 0.574952
2, 6, 6, 1.047198
*END STEP
可以看出,第二、三步的边条是分别加上了前几步已定义的旋转边界条件!