速腾16线激光雷达运行LOAM、A-LOAM和LeGO-LOAM
二维激光雷达SLAM已经相当成熟,前一段时间开始接触三维激光雷达,发现资料很少,遇到了很多问题,也有一些收获,趁着假期整理一下。本人使用turtlebot搭载速腾16线激光雷达(只使用激光雷达,没有用到IMU),运行并对比LOAM、A-LOAM和LeGO-LOAM异同。
环境:
1、速腾16线激光雷达rslidar;
2、工控机;
3、Ubuntu 16.04;
4、Turtlebot。
参考博客:
1.记录robosense16多线雷达配置过程(同门的博客)https://blog.csdn.net/Anubissz/article/details/107838647
2. 3D-SLAM 入门教程-多线雷达(RSlidar 16)loam_velodyne 3D 建图https://www.ncnynl.com/archives/201702/1382.html
3.保存并查看 Loam 的三维点云地图https://blog.csdn.net/qq_36396941/article/details/83048415
4. A-LOAM的github官方安装方法
https://github.com/HKUST-Aerial-Robotics/A-LOAM
5. Ceres安装报错“找不到要求版本3.3的Eigen3”解决方法https://www.cnblogs.com/didada/p/12305066.html
6. ceres报错:Eigen3版本和ceres版本冲突问题
https://zhuanlan.zhihu.com/p/149775218?from_voters_page=true
7. LOAM的编译安装运行(安装PCL1.8)
https://blog.csdn.net/weixin_43211438/article/details/87818526
8. LeGO-LOAM的github官方安装方法
https://github.com/RobustFieldAutonomyLab/LeGO-LOAM
9. LeGO-LOAM初探:原理,安装和测试https://blog.csdn.net/learning_tortosie/article/details/86527542
10. GTSAM和LeGO-LOAM安装调试错误与解决方案
https://zhuanlan.zhihu.com/p/123446216
11. 【激光雷达】3D激光雷达传感器建图:速腾聚创、velodyne建图过程总结https://blog.csdn.net/xingdou520/article/details/85098314
12. LeGO-LOAM和LOAM的区别与联系
https://zhuanlan.zhihu.com/p/115986186
1. robosense16多线雷达配置
1.1 安装驱动源码
$ mkdir –p ~/catkin_rslidar/src
$ cd catkin_rslidar/src
$ git clone https://github.com/RoboSense-LiDAR/ros_rslidar
1.2 安装 libpcap-dev
$ sudo apt-get install libpcap-dev
1.3 更改源码属性
$ cd ros_rslidar/rslidar_drvier
$ chmod 777 cfg/*
$ cd ..
$ cd rslidar_pointcloud
$ chmod 777 cfg/*
1.4 catkin make
1.5 将自己的工控机与雷达连接,修改 ip
通过ifconfig 查看网口名字,enp4s0 是本人的工控机的网口名字。
将本地 ip 地址改为 192.168.1.102,子网掩码设置为 255.255.255.0:
$ sudo ifconfig enp4s0 192.168.1.102 netmask 255.255.255.0
1.6 测试
$ cd ~/catkin_rslidar
$ source devel/setup.bash
$ roslaunch rslidar_pointcloud rs_lidar_16.launch
看到多线雷达的画面:

2. LOAM 安装和测试
2.1 安装 loam_velodyne
$ cd catkin_rslidar/src
$ git clone https://github.com/laboshinl/loam_velodyne.git
$ cd ..
$ catkin_make
其中,我遇到了问题catkin_make 运行出错:

查到解决方案如下:

2.2 rslidar 跑 loam 的准备
进入 launch 目录
$ roscd loam_velodyne/launch/
增加 loam_rslidar.launch(内容见附录),由于未使用imu,去掉了两句 imu 数据的映射。
<launch>
<node pkg="tf" type="static_transform_publisher" name="rslidarlink_broadcaster" args="0.0 0.0 0.42 0.0 0.0 0.0 base_link laser 50"/>
<arg name="rviz" default="false" />
<arg name="scanPeriod" default="0.1" />
<arg name="lidartype" default="VLP-16" /> <!-- options: VLP-16 HDL-32 HDL-64E RS-32 RS-16-->
<node pkg="loam_velodyne" type="multiScanRegistration" name="multiScanRegistration" output="screen">
<param name="lidar" value="$(arg lidartype)" /> <!-- options: VLP-16 HDL-32 HDL-64E RS-32 RS-16 -->
<param name="scanPeriod" value="$(arg scanPeriod)" />
<remap from="/multi_scan_points" to="/rslidar_points" />
<!--remap from="/imu/data" to="/mobile_base/sensors/imu_data" /-->
</node>
<node pkg="loam_velodyne" type="laserOdometry" name="laserOdometry" output="screen" respawn="true">
<param name="scanPeriod" value="$(arg scanPeriod)" />
</node>
<node pkg="loam_velodyne" type="laserMapping" name="laserMapping" output="screen">
<param name="scanPeriod" value="$(arg scanPeriod)" />
<!--remap from="/imu/data" to="/mobile_base/sensors/imu_data" /-->
</node>
<node pkg="loam_velodyne" type="transformMaintenance" name="transformMaintenance" output="screen">
</node>
<group if="$(arg rviz)">
<node launch-prefix="nice" pkg="rviz" type="rviz" name="rviz" args="-d $(find loam_velodyne)/rviz_cfg/loam_velodyne.rviz" />
</group>
</launch>
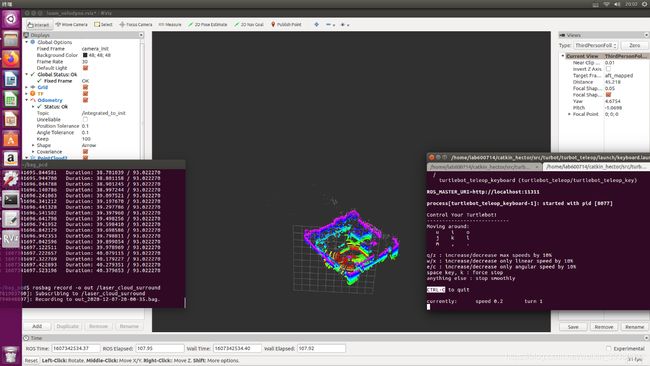
2.3 LOAM实际运行过程
loam_velodyne 实时建图:
修改雷达 IP:
$ sudo ifconfig enp4s0 192.168.1.102 netmask 255.255.255.0
启动 rslidar 雷达
$ roslaunch rslidar_pointcloud rs_lidar_16.launch
新终端,启动 loam_velodyne 建图和 Rviz
$ roslaunch loam_velodyne loam_rslidar.launch
 启动底盘
启动底盘
$ roslaunch turtlebot_bringup minimal.launch
启动键盘控制建图
$ roslaunch turtlebot_teleop keyboard_teleop.launch
建图效果如下:
2.4 保存并查看 loam 的三维点云地图
在建图过程中执行, 来录制 loam 后生成的地图。点云话题是 laser_cloud_surround,
录好之后 ctrl+c 结束, mybag.bag 是录好之后的包的名字。
$ rosbag record -o mybag.bag out /laser_cloud_surround
将 bag 文件转换成 pcd 文件:
$ rosrun pcl_ros bag_to_pcd mybag.bag /laser_cloud_surround mypcd
mypcd 是转换成 pcd 的文件夹名字。获取的 pcd 文件是很多个,每一个 pcd 是一
帧数据。可以通过 pcl_viewer 命令查看 pcd 格式的最后一个文件:
$ pcl_viewer yourname.pcd

loam是三维slam中最基础的算法。实际运行过程中,小车转弯时,构建的地图容易翻转,效果不是很好。
3. A-LOAM 安装和测试
3.1 Ceres Solver
github上安装A-LOAM步骤:(These instructions are for Ubuntu 18.04 and newer. On Ubuntu 16.04 you need to manually get a more recent version of Eigen, such as 3.3.7.)
https://github.com/HKUST-Aerial-Robotics/A-LOAM
注释中强调他的步骤是针对Ubuntu 18.04及更新版本,由于我的Ubuntu是16.04。按照此步骤进行,安装Eigen3.3报错:Ceres安装报错“找不到要求版本3.3的Eigen3”,查找解决方案,可直接安装Eigen3.3.7:(或遇到此错误按照此方法卸载重装3.3.7)
https://www.cnblogs.com/didada/p/12305066.html
按步骤安装了ceres2.0.0,ceres报错:Eigen3版本和ceres版本冲突问题,查找解决方案,直接安装ceres1.14.0(或遇到此错误按照此方法卸载重装1.14.0)
https://zhuanlan.zhihu.com/p/149775218?from_voters_page=true
3.2 PCL
github步骤中pcl点击失效,如若PCL1.7不能运行,可卸载PCL1.7,安装PCL1.8。(我用第二台工控机安装的时候,直接就可以运行)
安装PCL1.8可参考:https://blog.csdn.net/weixin_43211438/article/details/87818526
3.3 A-LOAM实际运行
$ roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
运行此指令便可看到效果,但是我的却报错,如遇到此情况
找不到两个包,用直接运行cpp方式运行其余两个节点:
$ cd turbot_ws/devel/lib/aloam_velodyne
$ ./alaserMapping
$ ./alaserOdometry
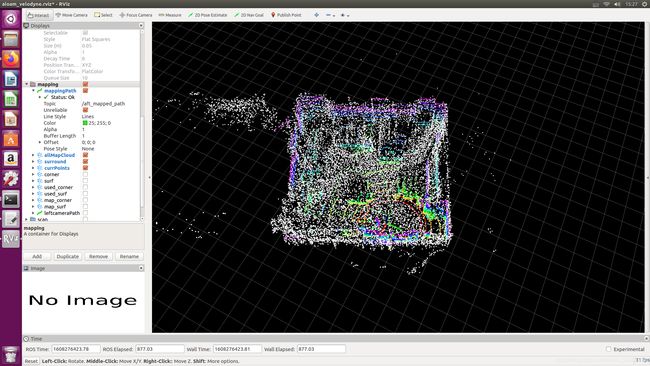
保存并查看 A-LOAM 的三维点云地图,点云相对稠密:

A-LOAM可以生成robot运动轨迹:
$ rostopic echo /aft_mapped_path
将位姿输出成aloam_pose.txt:
$ rostopic echo /aft_mapped_path > aloam_pose.txt

轨迹在一个平面上。
4. LeGO-LOAM 安装和测试
4.1 安装gtsam并编译
$ git clone https://bitbucket.org/gtborg/gtsam.git
编译
$ cd ~/gtsam
$ mkdir build
$ cd build
$ cmake ..
$ sudo make install(一定要加上sudo)
4.2 下载并编译LeGO-LOAM
$ mkdir -p ~/lego_loam_test/src
$ cd ~/lego_loam_test/src
$ git clone https://github.com/RobustFieldAutonomyLab/LeGO-LOAM.git
$ cd ..
$ catkin_make -j1
当第一次编译代码时,需要在“catkin_make”后面添加“-j1”以生成一些消息类型。将来的编译不需要“-j1”。报错:

解决方案:
将/usr/local/lib/cmake/GTSAM/GTSAMConfig.cmake:17 行的find_dependency改成find_package。具体操作:
$ cd /usr/local/lib/cmake/GTSAM/
$ sudo chmod a+w GTSAMConfig.cmake
$ gedit GTSAMConfig.cmake
重新运行
$ cd ~/lego_loam_test
$ catkin_make -j1
4.3 数据集运行
运行launch文件:(这个rviz界面确实是黑的,不要慌张)
$ roslaunch lego_loam run.launch
播放bag文件(数据集)
$ rosbag play *.bag --clock --topic /velodyne_points
4.4 LeGO-LOAM实际运行
修改雷达发布的话题,convert.cc中output_points_topic由rslidar_points改为velodyne_points(rslidar16默认发布的 topic 为/rslidar_points,而LeGO-LOAM需要订阅的 topic 为/velodyne_points,这个问题耽误进度很久)。再改“utility.h”中的参数,即可。开启雷达后,运行lego-loam:
$ roslaunch lego_loam run.launch
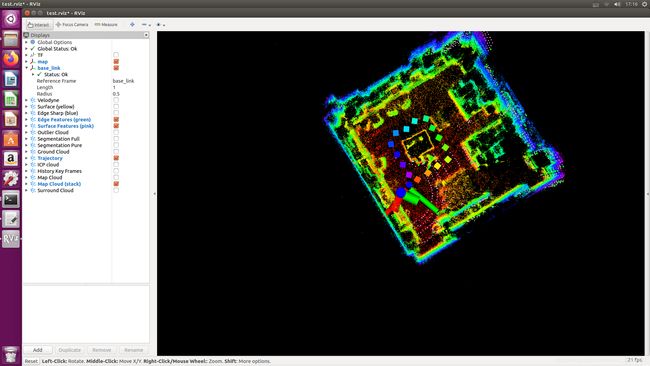
生成4个pcd文件:finalCloud.pcd,cornerMap.pcd,surfaceMap.pcd,trajectory.pcd。最终点云地图,点云相对少。
录制自己的数据包:
$ rosbag record -O mybag.bag /velodyne_points
在终端执行以下命令,可以打印pose:
$ rostopic echo /aft_mapped_to_init
在终端执行以下命令,可以将pose保存到pose.txt中:
$ rostopic echo /aft_mapped_to_init > pose.txt
5. 总结、对比:
图片均来自博客:https://zhuanlan.zhihu.com/p/115986186。
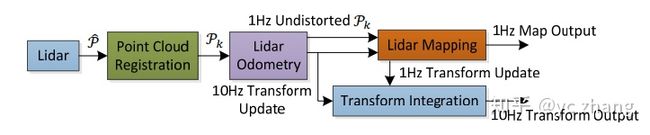
LOAM进行了特征点提取和匹配,边缘点和平面点。
缺点:不能处理大规模的旋转变换。
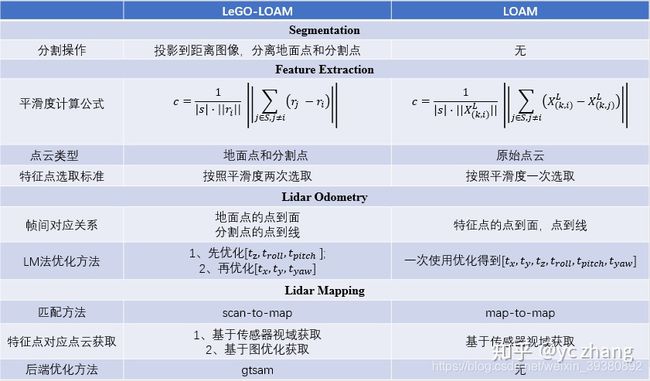
A-LOAM是LOAM简化版本。
A-LOAM没有提供IMU信息修正的接口,缺少对提取到的特征点的筛选;
LOAM使用LM优化方法,A-LOAM则是使用了Ceres库完成;
LOAM中解析地求出了雅可比的表达式,A-LOAM使用了Ceres提供的自动求导工具。
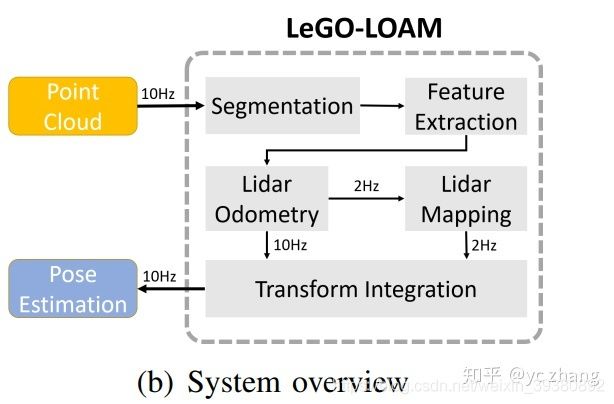
LeGO-LOAM特点:轻量级,点云分割去除噪声,带有地面优化的实时6自由度估计,回环检测。
增加了更多预处理步骤,包括地面的提取,和点云分割。使用更多筛选之后的点云再提取特征点;
在提取特征点时,将点云分成小块,分别提取特征点,以保证特征点的均匀分布;
一个双步骤的LM优化,先使用平面点优化高度,同时利用地面的方向优化两个角度信息;再使用边角点优化剩下的三个变量;
不用的地图点存储方式。LOAM中将所有历史的点云存储到同一张点云图中。LeGO-LOAM则是分别存储每一帧的特征点信息和每一帧的位姿数据;
适合室外场景。
原理和代码还得认真学习和钻研,加油!如有错误,欢迎纠正。