opencv 手册_I.MX6 Linux Yocto与OpenCV
配件环境:
- 主机:Ubuntu16.04 LTS 64bit
- 开发板:NXP imx6qsabresd
- Bsp version:fsl-yocto-L4.1.15_2.0.0-ga
- Yocto Project version: 2.1
Yocto配置:
- 主机包安装: 打开Terminal依次输入以下三条语句,如果速度很慢,可以更换国内下载源。
$ sudo apt-get install gawk wget git-core diffstat unzip texinfo gcc-multilib
build-essential chrpath socat libsdl1.2-dev
$ sudo apt-get install libsdl1.2-dev xterm sed cvs subversion coreutils texi2html
docbook-utils python-pysqlite2 help2man make gcc g++ desktop-file-utils
libgl1-mesa-dev libglu1-mesa-dev mercurial autoconf automake groff curl lzop asciidoc
$ sudo apt-get install u-boot-tools2.repo工具:Terminal依次输入
$ mkdir ~/bin
$ curl http://commondatastorage.googleapis.com/git-repo-downloads/repo > ~/bin/repo
$ chmod a+x ~/bin/repo接着在./bashrc文件最后一行添加环境变量,然后source ~/.bashrc保存生效。
$ export PATH=~/bin:$PATH此处,repo的链接上不去(xx原因),解决方案是更改~/bin/repo文件下的REPO_URL,换为国内镜像。
REPO_URL = 'https://mirrors.tuna,tsinghua.edu.cn/git/git-repo'3.设置Yocto的Git配置:创建yocto工程文件夹后,git下bsp代码和工具,然后repo同步命令更新下载。
$ mkdir fsl-release-bsp
$ cd fsl-release-bsp
$ git config --global user.name "Your Name"
$ git config --global user.email "Your Email"
$ git config --list
$ repo init -u git://git.freescale.com/imx/fsl-arm-yocto-bsp.git -b imx-3.14.28-1.0.0_ga
$ repo syncYocto编译:
1.根据板子的名称和DISTRO配置选项(yocto用户手册中有),选择创建目标。例如
$ MACHINE=imx6qsabresd source fsl-setup-release.sh -b build-x11 -e x112.编译带有opencv库的yocto环境,需要更改/fsl-release-bsp-x11/conf/local.conf文件,如下
MACHINE ??= 'imx6qsabresd'
DISTRO ?= 'poky'
PACKAGE_CLASSES ?= "package_rpm package_ipk"
EXTRA_IMAGE_FEATURES = "debug-tweaks package-management"
IMAGE_INSTALL_append = " opkg "
USER_CLASSES ?= "buildstats image-mklibs image-prelink"
PATCHRESOLVE = "noop"
BB_DISKMON_DIRS = "
STOPTASKS,${TMPDIR},1G,100K
STOPTASKS,${DL_DIR},1G,100K
STOPTASKS,${SSTATE_DIR},1G,100K
ABORT,${TMPDIR},100M,1K
ABORT,${DL_DIR},100M,1K
ABORT,${SSTATE_DIR},100M,1K"
PACKAGECONFIG_pn-qemu-native = "sdl"
ASSUME_PROVIDED += "libsdl-native"
CONF_VERSION = "1"
IMAGE_FSTYPES = "tar.bz2 ext3 sdcard"
BB_NUMBER_THREADS = '4'
PARALLEL_MAKE = '-j 4'
DL_DIR ?= "${BSPDIR}/downloads/"
ACCEPT_FSL_EULA = "1"
CORE_IMAGE_EXTRA_INSTALL += "libopencv-core-dev libopencv-highgui-dev libopencv-imgproc-dev libopencv-objdetect-dev libopencv-ml-dev"
LICENSE_FLAGS_WHITELIST = "commercial"3.选择要编译的镜像类型,注意这需要很大空间(至少80G),也需要很多时间。
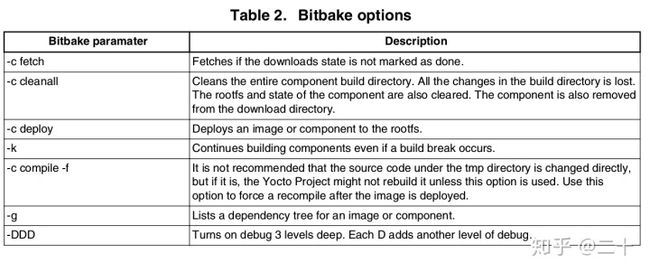
$ bitbake 可选
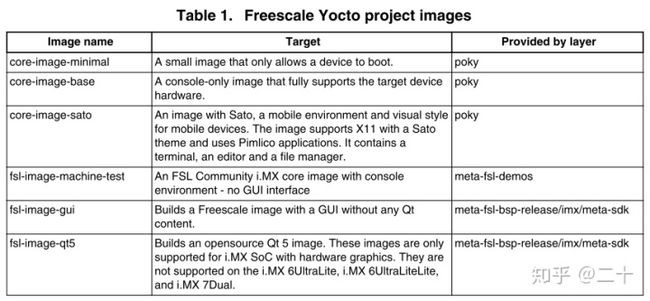
可选
编译过程中出现了报错,有两个文件没能下下来,手动下载后且需新建.done文件告知以下载成功。
报错1:ERROR: cpuburn-neon-20140626-r0 do_fetch: Function failed: Fetcher failure for URL: 'http:// hardwarebug.org/files/burn.S;name=mru'. Unable to fetch URL from any source.
解决:将burn.S和cpuburn-a8.S放入../fsl-release-bsp/downloads/cpuburn-neon-20140626/文件夹下,且新建burn.S.done cpuburn-a8.S.done文件
报错2:ERROR: imx-codec-4.1.6-r0 do_fetch: Fetcher failure for URL: 'http://www.freescale.com/lgfiles/NMG/MAD/YOCTO//imx-codec-4.1.6.bin;fsl-eula=true'. Checksum mismatch!
解决:将imx-codec-4.1.6.bin放入../fsl-release-bsp/downloads/文件夹下,且新建imx-codec-4.1.6.bin.done文件
此外,git clone很慢的解决方法:
1.访问https://www.ipaddress.com,找到页面中下方的“IP Address Tools – Quick Links”,分别输入github.global.ssl.fastly.net和github.com,查询ip地址。
2./etc/hosts 末尾添加后重启
github.global.ssl.fastly.Net 173.252.102.16
Build software better, together 13.250.177.2334. FLASH IMAGE ONTO SD CARD (Freescale_Yocto_Project_User's_Guide.pdf)
$ cd ~/fsl-release-bsp/build-x11/tmp/deploy/images/imx6qsabresd/
$ sudo dd if=.sdcard of=/dev/sd bs=1M && sync 5.编译工具链
$ cd ~/fsl-release-bsp/build-x11/
$ bitbake -c populate_sdk 6.安装工具链
$ cd ~/fsl-release-bsp/build-x11/tmp/deploys/sdk/
$ ./poky-glibc-x86_64-core-image-sato-cortexa9hf-neon-toolchain-2.1.1.sh7.开启交叉编译环境,就可以编译自己的程序放在arm板上跑了。
*open a new terminal
$ cd /opt/poky/2.1.1
$ . ./environment-setup-cortexa9hf-neon-poky-linux-gnueabi 基于OpenCV的简易单目测距:
需求设计:提取视频信息中最大物体(入门学习,简易实现,因此针对的是无障碍情况况),并计算此物体距离摄像头的距离。
实现思路:实现步骤主要分为读取摄像头的视频图像、检测视频最大物体、测量物体与摄像头的距离。详细地,就是对读取到的视频图像灰度化二值化后canny算子提取轮廓,然后针对图像中最大轮廓物体进行距离测量,距离测量的方法参考相似三角形原理,即可得
#include "opencv/highgui.h"
#include "opencv/cv.h"
#include
#include
#include
using namespace cv;
using std::vector;
using std::string;
int main()
{
//初始化
Mat frame;
Mat gray;
Mat dosmooth;
Mat dothreshold;
Mat docanny;
Mat polyPic;
vector> contours;//Vector里放vector,子vector里存放四个点坐标
//获取摄像头读取的视频信息
VideoCapture capture;
frame = capture.open(0);
if (!capture.isOpened()) {
std::cout<< "ERROR! Unable to open cameran"<> polyContours(contours.size());
vector minRect(contours.size());//vector: 像素width * height from 位置(x*y)
int maxArea = 0;
for (int index = 0; index < contours.size(); index++) {
if (contourArea(contours[index]) > contourArea(contours[maxArea]))
maxArea = index;
approxPolyDP(contours[index], polyContours[index], 10, true);
//设置阈值为10,将轮廓绘制成闭合折线,为提取矩形。
}
//画出最大轮廓
polyPic = Mat::zeros(frame.size(), CV_8UC3);
drawContours(polyPic, polyContours, maxArea, Scalar(0, 0, 255/*rand() & 255, rand() & 255, rand() & 255*/), 2);
//顺时针绘制凸包,即能包围这个物体的凸集的交集。
vector hull;
convexHull(polyContours[maxArea], hull, true);
//将角点绘制成半径为10非填充的圆圈
for (int i = 0; i < hull.size(); ++i) {
circle(polyPic, polyContours[maxArea][i], 10, Scalar(rand() & 255, rand() & 255, rand() & 255), 3);
}
addWeighted(polyPic, 0.5, frame, 0.5, 0, frame);//融合背景和前景区域框
//测距
float g_dConLength = arcLength(polyContours[maxArea], true);//像素宽度
float knowLength = 21;//实际物体宽度
float focalLength =4539;//焦距
float distance = (knowLength * focalLength) / g_dConLength;//待测距离
//将测得的距离显示在图像左上角
string dis_str = std::to_string(distance);
Point p(20,20);
putText(frame, dis_str, p, FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0), 2,false );
imshow("output", frame);
//保存处理后的图像
writer.write(frame);
if (frame.empty())break;
int ch = waitKey(100);
if ((char)ch ==27){
break;
}
}
writer.release();
capture.release();
return 0;
}
移植到I.MX6:
写好了demo之后,需要在Linux主机的交叉编译环境下编译代码,生成可执行文件。然后,将可执行文件拷贝到插入开发板的sd卡上。最后,同过minicomc调试板子运行可执行文件。
1.开启交叉编译环境
*open a new terminal
$ cd /opt/poky/2.1.1
$ . ./environment-setup-cortexa9hf-neon-poky-linux-gnueabi 2.Makefile编译生成可文件
#before buildint it don't forget to export ROOTF_DIR and TOOLCHAIN (only if they are uncommented here)
APPNAME = ceju
DESTDIR = ../bin
SRCDIR = ../src
CXX = $(CROSS_COMPILE)g++
DEL_FILE = rm -rf
CP_FILE = cp -rf
ROOTFS_DIR = $(SDKTARGETSYSROOT)
TARGET_PATH_LIB = $(ROOTFS_DIR)/usr/lib
TARGET_PATH_INCLUDE = $(ROOTFS_DIR)/usr/include
CFLAGS = -march=armv7-a -marm -mfpu=neon -mfloat-abi=hard -mcpu=cortex-a9 --sysroot=$(ROOTFS_DIR)
-DEGL_USE_X11 -DGPU_TYPE_VIV -DGL_GLEXT_PROTOTYPES -DENABLE_GPU_RENDER_20
-I.
LFLAGS = -march=armv7-a -marm -mfpu=neon -mfloat-abi=hard -mcpu=cortex-a9 --sysroot=$(ROOTFS_DIR) -lm
-lopencv_core -lopencv_imgproc -lopencv_highgui -lopencv_ml -lopencv_videoio
-lusb-1.0
-lEGL -lGLESv2 -lpthread
OBJECTS = $(APPNAME).o
first: all
all: $(APPNAME)
$(APPNAME): $(OBJECTS)
$(CXX) $(LFLAGS) -o $(DESTDIR)/$(APPNAME) $(OBJECTS)
$(APPNAME).o: $(APPNAME).cpp
$(CXX) $(CFLAGS) -c $(APPNAME).cpp
clean:
$(DEL_FILE) $(SRCDIR)/$(OBJECTS)
$(DEL_FILE) $(DESTDIR)/$(OBJECTS)
$(DEL_FILE) $(DESTDIR)/*~ $(DESTDIR)/*.core
$(DEL_FILE) $(DESTDIR)/$(APPNAME)
distclean: clean
$(DEL_FILE) $(DESTDIR)/$(APPNAME)
install: all
#${CP_FILE} $(SRCDIR)/$(APPNAME) $(DESTDIR)/$(APPNAME)
#${CP_FILE} $(DESTDIR)/$(APPNAME) $(ROOTFS_DIR)/home/opencv3.利用读卡器将可执行文件cp到板子的sd卡,通过mincom串口调试利器运行程序
$ sudo cp bin/ceju /your_board_path
$ sudo minicom
root@:~$ ./your_board_path/your_project_name 至此,实现了一个简易的测距demo,精度不是太高,而且只能实现简单背景情况下的测距。所以,需要学习的还有很多!!!

学习参考:
https://imxcv.blogspot.com/2014/02/building-opencv-24x-for-freescales-imx6.htmlimxcv.blogspot.com https://www.toradex.com/zh-cn/blog/starting-with-opencv-on-imx6-processorswww.toradex.com https://yixiaoyang.github.io/articles/2016-12/opencv-contoursyixiaoyang.github.io 利用OpenCV提取图像中的矩形区域(PPT屏幕等) - 个人文章 - SegmentFault 思否segmentfault.com