第九届蓝桥杯嵌入式省赛(STM32G4及HAL库)
题目要求
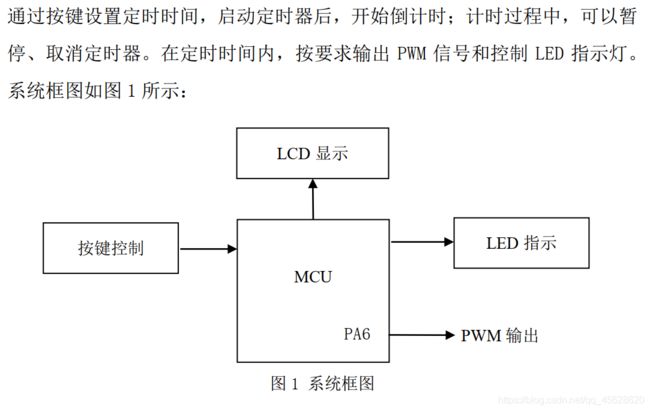
硬件框图
功能描述
LCD显示

按键功能

PWM输出和LED显示

定时时间存储

功能实现
为了方便提交,这里将所有代码放在main.c中
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* © Copyright (c) 2021 STMicroelectronics.
* All rights reserved.
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "string.h"
#include "lcd.h"
#include "i2c - hal.h"
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
#define Key_Short_OK 1
#define Key_Long_OK 2
#define Key_Err 3
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
TIM_HandleTypeDef htim4;
/* USER CODE BEGIN PV */
uint8_t Zoom = 1;
uint16_t Times = 0;
uint16_t TIME_Key = 0;
char Lcd_temp[30];
uint8_t Key_Flag = 0;
uint8_t Key_Val_2;
uint8_t Key_Val_3;
uint8_t Key_Val_4;
uint8_t EE = 1;
uint8_t Seconds = 0;
uint8_t Minutes= 0;
uint8_t Hours = 0;
uint8_t Key4_Flag = 0;
uint8_t Key4_Flags = 0;
uint8_t Key2_Flag = 0;
uint8_t Sate = 0;
uint8_t temp = 0;
uint8_t LED_Flag = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM3_Init(void);
static void MX_TIM4_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t Key_Scan(GPIO_TypeDef *GPIOx, uint16_t GPIO_Pin)
{
if(HAL_GPIO_ReadPin(GPIOx, GPIO_Pin) == RESET){
TIME_Key = 0;
while(HAL_GPIO_ReadPin(GPIOx, GPIO_Pin) == RESET);
Key_Flag = 1;
}
if(TIME_Key <= 8 && Key_Flag == 1){
Key_Flag = 0;
return Key_Short_OK;
}
if(TIME_Key > 8 && Key_Flag == 1){
Key_Flag = 0;
return Key_Long_OK;
}
return Key_Err;
}
void LED_Start()
{
if(Sate == 2){
if(LED_Flag < 5){
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_All, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_8, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
if(LED_Flag >= 5 ){
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_All, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
if(LED_Flag >= 10){
LED_Flag = 0;
}
}
}
void LED_Stop()
{
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_All, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
}
uint8_t Read_M2402(unsigned char address)
{
uint8_t val;
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CStart();
I2CSendByte(0xa1);
I2CWaitAck();
val = I2CReceiveByte();
I2CWaitAck();
I2CStop();
return val;
}
void Write_M2402(unsigned char address, unsigned char info)
{
I2CStart();
I2CSendByte(0xa0);
I2CWaitAck();
I2CSendByte(address);
I2CWaitAck();
I2CSendByte(info);
I2CWaitAck();
I2CStop();
}
void Save_Time()
{
Write_M2402(Zoom *10 + 0x01, Hours);
HAL_Delay(5);
Write_M2402(Zoom *10 + 0x02, Minutes);
HAL_Delay(5);
Write_M2402(Zoom *10 + 0x03, Seconds);
}
void Restar_Time()
{
Hours = Read_M2402(10 + 0x01);
HAL_Delay(5);
Minutes = Read_M2402(10 + 0x02);
HAL_Delay(5);
Seconds = Read_M2402(10 + 0x03);
HAL_Delay(5);
Times = 3600 * Hours + 60 * Minutes + Seconds;
}
void Key4()
{
if(Key_Val_4 == Key_Short_OK){
Key4_Flag = !Key4_Flag;
}
if(Key_Val_4 == Key_Long_OK){
HAL_TIM_Base_Stop_IT(&htim4);
HAL_TIM_PWM_Stop_IT(&htim3,TIM_CHANNEL_1);
LED_Stop();
Key4_Flags = 1;
Sate = 0;
}
if(Key4_Flag != temp){
if(Key4_Flag == 1){
//__HAL_TIM_CLEAR_FLAG(&htim4,TIM_FLAG_UPDATE);
HAL_TIM_Base_Start_IT(&htim4);
HAL_TIM_PWM_Start_IT(&htim3,TIM_CHANNEL_1);
Sate = 2;
Key4_Flags = 0;
}
if(Key4_Flag == 0 && Key4_Flags == 0){
//__HAL_TIM_CLEAR_FLAG(&htim4,TIM_FLAG_UPDATE);
HAL_TIM_Base_Stop_IT(&htim4);
HAL_TIM_PWM_Stop_IT(&htim3,TIM_CHANNEL_1);
LED_Stop();
Sate = 3;
}
}
temp = Key4_Flag;
}
void Key2()
{
if(Key_Val_2 == Key_Short_OK){
Key2_Flag++;
if(Key2_Flag > 4){
Key2_Flag = 0;
}
}
//进入设置状态
if(Key2_Flag == 1){
Sate = 1;
}
//选中时
if(Key2_Flag == 2){
LCD_SetTextColor(Red);
if(Key_Val_3 == Key_Short_OK){
Hours += 1;
}
if(Key_Val_3 == Key_Long_OK){
Hours += 5;
}
}else
{
LCD_SetTextColor(Blue);
}
LCD_DisplayChar(Line5,210, Hours / 10 + 0x30);
LCD_DisplayChar(Line5,195, Hours % 10 + 0x30);
//选中分
if(Key2_Flag == 3){
LCD_SetTextColor(Red);
if(Key_Val_3 == Key_Short_OK){
Minutes += 1;
}
if(Key_Val_3 == Key_Long_OK){
Minutes += 5;
}
}else
{
LCD_SetTextColor(Blue);
}
LCD_DisplayChar(Line5,165, Minutes / 10 + 0x30);
LCD_DisplayChar(Line5,150, Minutes % 10 + 0x30);
//选中秒
if(Key2_Flag == 4){
LCD_SetTextColor(Red);
if(Key_Val_3 == Key_Short_OK){
Seconds += 1;
}
if(Key_Val_3 == Key_Long_OK){
Seconds += 5;
}
}else
{
LCD_SetTextColor(Blue);
}
LCD_DisplayChar(Line5,120, Seconds / 10 + 0x30);
LCD_DisplayChar(Line5,105, Seconds % 10 + 0x30);
LCD_SetTextColor(Blue);
if(Key_Val_2 == Key_Long_OK){
Save_Time();
Sate = 0;
//存储当前位置
}
if(Seconds >= 60){
Seconds = 0;
}
if(Minutes >= 60){
Minutes = 0;
}
if(Hours >= 4){
Times = 0;
Seconds = 0;
Minutes = 0;
}
if(Sate == 1)
Times = 3600 * Hours + 60 * Minutes + Seconds;
}
void SateMode()
{
if(Sate == 0){
LCD_DisplayStringLine(Line7,(uint8_t*)" Standby ");
}
if(Sate == 1){
LCD_DisplayStringLine(Line7,(uint8_t*)" Setting ");
}
if(Sate == 2){
LCD_DisplayStringLine(Line7,(uint8_t*)" Running ");
}
if(Sate == 3){
LCD_DisplayStringLine(Line7,(uint8_t*)" Pause ");
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM2_Init();
MX_TIM3_Init();
MX_TIM4_Init();
/* USER CODE BEGIN 2 */
LCD_Init();
LCD_Clear(White);
LCD_SetBackColor(White);
HAL_TIM_Base_Start_IT(&htim2);
//HAL_TIM_Base_Start_IT(&htim4);
I2CInit();
Restar_Time();
LED_Stop();
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Key_Val_2 = Key_Scan(GPIOB, GPIO_PIN_1);
Key_Val_3 = Key_Scan(GPIOB, GPIO_PIN_2);
Key_Val_4 = Key_Scan(GPIOA, GPIO_PIN_0);
LCD_SetTextColor(Blue);
sprintf( Lcd_temp, " NO %2d ", Zoom);
LCD_DisplayStringLine(Line1,(uint8_t*) Lcd_temp);
Key2();
Seconds = Times %3600 % 60;
Minutes = Times %3600 / 60;
Hours = Times / 3600;
if(Sate != 1){
Key4();
//显示时间
LCD_SetTextColor(Blue);
LCD_DisplayChar(Line5,210, Hours / 10 + 0x30);
LCD_DisplayChar(Line5,195, Hours % 10 + 0x30);
LCD_DisplayChar(Line5,180, ':');
LCD_DisplayChar(Line5,165, Minutes / 10 + 0x30);
LCD_DisplayChar(Line5,150, Minutes % 10 + 0x30);
LCD_DisplayChar(Line5,135, ':');
LCD_DisplayChar(Line5,120, Seconds / 10 + 0x30);
LCD_DisplayChar(Line5,105, Seconds % 10 + 0x30);
//LCD_DisplayChar(Line4,135, ':');
}
//当前状态
SateMode();
LED_Start();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {
0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {
0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV3;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB busses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_3) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {
0};
TIM_MasterConfigTypeDef sMasterConfig = {
0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 79;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {
0};
TIM_OC_InitTypeDef sConfigOC = {
0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 79;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 800;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim3, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
HAL_TIM_MspPostInit(&htim3);
}
/**
* @brief TIM4 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM4_Init(void)
{
/* USER CODE BEGIN TIM4_Init 0 */
/* USER CODE END TIM4_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {
0};
TIM_MasterConfigTypeDef sMasterConfig = {
0};
/* USER CODE BEGIN TIM4_Init 1 */
/* USER CODE END TIM4_Init 1 */
htim4.Instance = TIM4;
htim4.Init.Prescaler = 79;
htim4.Init.CounterMode = TIM_COUNTERMODE_UP;
htim4.Init.Period = 999;
htim4.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim4.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_Base_Init(&htim4) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim4, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim4, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM4_Init 2 */
/* USER CODE END TIM4_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {
0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pins : PC13 PC14 PC15 PC8
PC9 PC10 PC11 PC12 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : PA0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
/*Configure GPIO pin : PB0 */
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pins : PB1 PB2 */
GPIO_InitStruct.Pin = GPIO_PIN_1|GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PD2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/*Configure GPIO pins : PB6 PB7 */
GPIO_InitStruct.Pin = GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/* EXTI interrupt init*/
HAL_NVIC_SetPriority(EXTI0_IRQn, 8, 0);
HAL_NVIC_EnableIRQ(EXTI0_IRQn);
}
/* USER CODE BEGIN 4 */
/**
* @brief This function handles EXTI line0 interrupt.
*/
void EXTI0_IRQHandler(void)
{
/* USER CODE BEGIN EXTI0_IRQn 0 */
if(__HAL_GPIO_EXTI_GET_IT(GPIO_PIN_0) != RESET ){
Zoom++;
if(Zoom > 5){
Zoom = 1;
}
HAL_Delay(5);
__HAL_GPIO_EXTI_CLEAR_IT(GPIO_PIN_0);
}
/* USER CODE END EXTI0_IRQn 0 */
/* USER CODE BEGIN EXTI0_IRQn 1 */
/* USER CODE END EXTI0_IRQn 1 */
}
/**
* @brief This function handles TIM2 global interrupt.
*/
void TIM2_IRQHandler(void)
{
/* USER CODE BEGIN TIM2_IRQn 0 */
/* USER CODE END TIM2_IRQn 0 */
HAL_TIM_IRQHandler(&htim2);
/* USER CODE BEGIN TIM2_IRQn 1 */
/* USER CODE END TIM2_IRQn 1 */
}
/**
* @brief This function handles TIM4 global interrupt.
*/
void TIM4_IRQHandler(void)
{
/* USER CODE BEGIN TIM4_IRQn 0 */
/* USER CODE END TIM4_IRQn 0 */
HAL_TIM_IRQHandler(&htim4);
/* USER CODE BEGIN TIM4_IRQn 1 */
/* USER CODE END TIM4_IRQn 1 */
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
static uint16_t TIM2_Cnt1 = 0;
static uint16_t TIM4_Cnt1 = 0;
if(htim->Instance == TIM2){
TIM2_Cnt1++;
if(TIM2_Cnt1 >= 100){
TIM2_Cnt1 = 0;
TIME_Key++;
LED_Flag ++;
}
}
if(htim->Instance == TIM4){
TIM4_Cnt1++;
if(TIM4_Cnt1 >= 1000){
TIM4_Cnt1 = 0;
Times++;
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
最后
笔者才疏学浅,文中颇有不足,其中按键判断时长是依据松开按键起,这里做的不是很好。若还有其它不足,请多多指教!