几何变换
图像的几何变换是指将一幅图像映射到另一幅图像内。有缩放、翻转、仿射变换、透视、重映射等操作。
1 缩放
使用cv2.resize()函数实现对图像的缩放,但要注意cv2.resize()函数内的dsize参数与原图像的行列属性是相反的,也就是:目标图像的行数是原始图像的列数,目标图像的列数是原始图像的行数。
下面举例说明cv2.resize()函数的用法:
import cv2
img=cv2.imread('E:/python_opencv/tupian.jpg')
rows,cols=img.shape[0:2] #行数和列数等于img的长度和宽度
size=(int(cols*0.9),int(rows*0.5)) #比例:列变为原来0.9倍,行变为0.5倍
rst=cv2.resize(img,size) #将img按size比例缩放
print('img.shape=',img.shape)
print('rst.shape=',rst.shape)
运行程序的结果如下:
img.shape=(600,60,3)
rst.shape=(300,54,3)
可以看出,行数变为原来的0.5倍,列数变为原来的0.9倍。代码中size的行列位置发生了交换。
2 翻转
使用cv2.flip()函数对图像翻转,能够实现水平方向翻转、垂直方向翻转、两个方向同时翻转。
下面举例说明cv2.flip()函数的用法:
import cv2
img=cv2.imread('E:/python_opencv/tupian.jpg')
x=cv2.flip(img,0) #图x对原图像绕x轴翻转
y=cv2.flip(img,1) #图y对原图像绕y轴翻转
xy=cv2.flip(img,-1) #图xy对原图像绕x轴y轴同时翻转
cv2.imshow('img',img)
cv2.imshow('x',x)
cv2.imshow('y',y)
cv2.imshow('xy',xy)
cv2.waitKey()
cv2.destroyAllWindows()
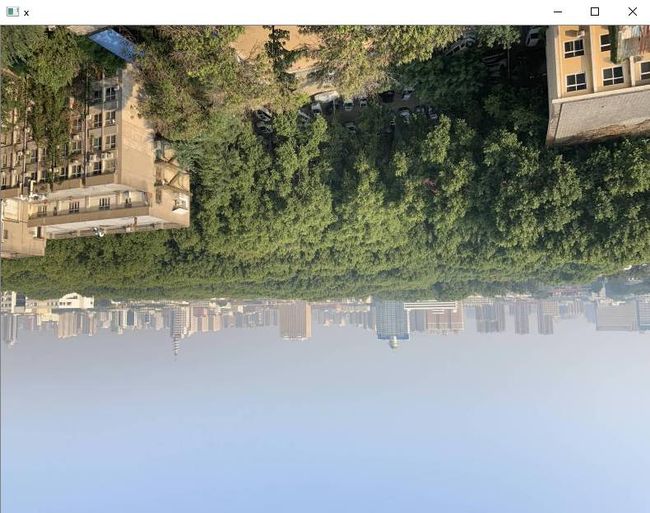
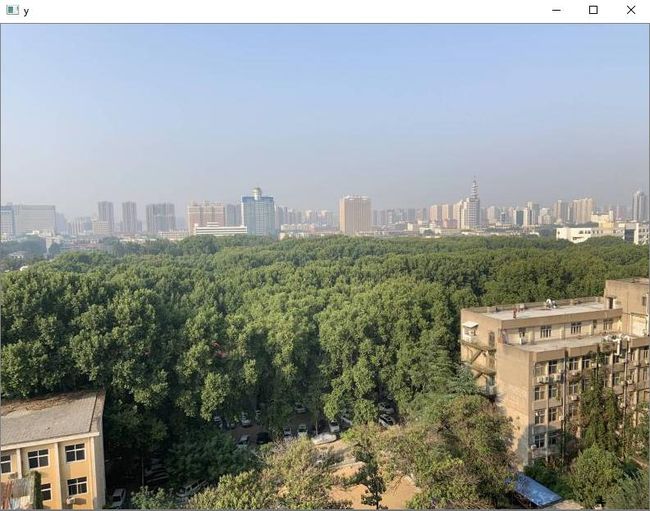
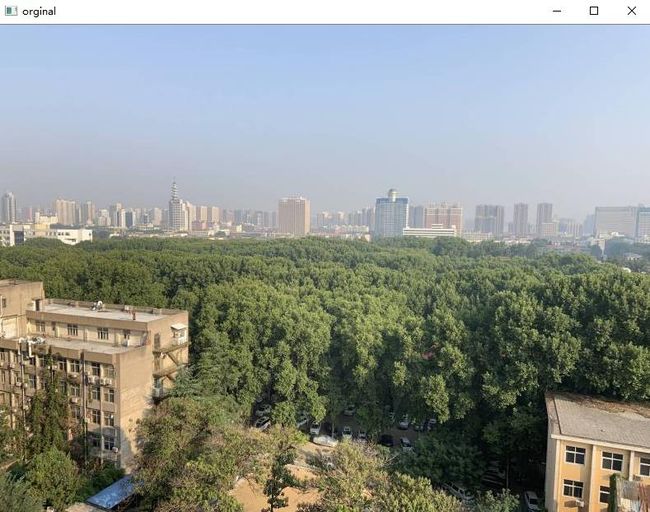
程序运行结果如下四幅图,第一幅是原图,第二幅是绕x轴翻转,第三幅是绕y轴翻转,第四幅是绕x轴y轴同时翻转。


3 仿射
仿射变换是指图像实现平移、旋转等操作。
先设置一个变换矩阵M,然后使用cv2.warpAffine()函数对原图像和变换矩阵M进行仿射操作。
(一)平移
要实现图像的平移,我们先自定义一个转换矩阵,再进行仿射平移变换。例程如下:
import cv2
import numpy as np
img=cv2.imread('E:\python_opencv/tupian.jpg')
height,width=img.shape[:2] #读取原图像的长和宽
x=100 #自定义转换矩阵M的x轴移动值
y=200 #自定义转换矩阵M的y轴移动值
M=np.float32([[1,0,x],[0,1,y]]) #构造转换矩阵M
move=cv2.warpAffine(img,M,(width,height)) #平移映射
cv2.imshow('orginal',img)
cv2.imshow('move',move)
cv2.waitKey()
cv2.destroyAllWindows()
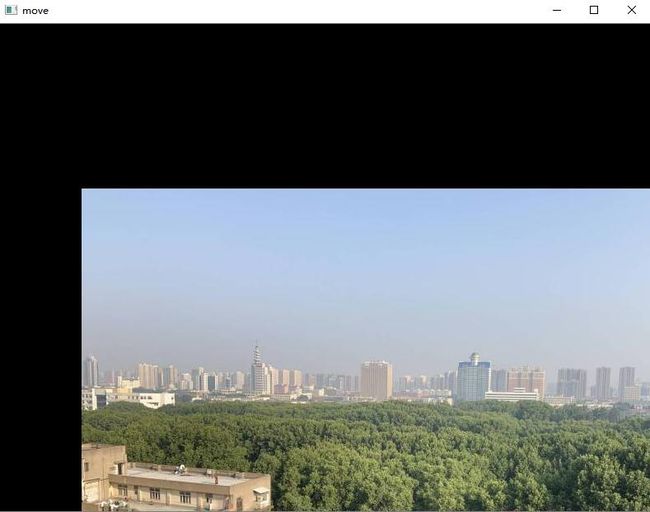
程序运行结果如下图所示,左为原图,右为平移后的图。
(二)旋转
使用函数cv2.getRotationMatrix2D()获得转移矩阵M,然后使用函数cv2.warpAffine()进行仿射旋转变换。例程如下:
import cv2
img=cv2.imread('E:\python_opencv/tupian.jpg')
height,width=img.shape[:2] #读取原图像的长和宽
M=cv2.getRotationMatrix2D((width/2,height/2),45,0.6) #以中心为原点,逆时针旋转45°,且缩小为原图的0.6倍,获得转移矩阵M
rotate=cv2.warpAffine(img,M,(width,height)) #旋转映射
cv2.imshow('original',img)
cv2.imshow('rotation',rotate)
cv2.waitKey()
cv2.destroyAllWindows()
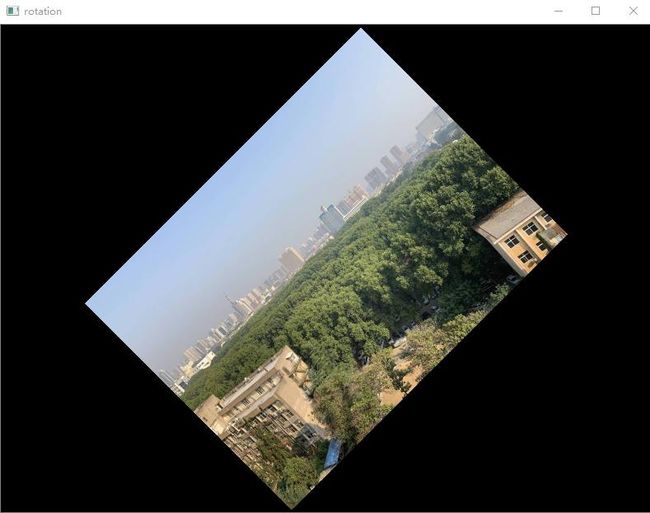
程序运行结果如下图所示,左为原图,右为旋转后的图。

4 透视
透视变换是指将矩阵图形投影到另一个视平面,可以映射为任意四边形,所以透视变换也被称为投影映射(ProjectionMapping),并不是字面意义上的“透视”。透视与上节的仿射不同,仿射可以将矩阵映射为任意平行四边形。
使用cv2.warpPerspective()函数实现透视变换。例程如下:
#完成图像透视
import cv2
import numpy as np
img=cv2.imread('E:/python_opencv/tupian.jpg')
rows,cols=img.shape[:2] #读取原图像的长和宽
print(rows,cols)
#生成旋转矩阵M
pts1=np.float32([[150,50],[400,50],[60,450],[310,450]])
pts2=np.float32([[50,50],[rows-50,50],[50,cols-50],[rows-50,cols-50]])
M=cv2.getPerspectiveTransform(pts1,pts2)
#使用函数cv2.warpPerspective()进行透视变换
dst=cv2.warpPerspective(img,M,(cols,rows))
cv2.imshow('img',img)
cv2.imshow('dst',dst)
cv2.waitKey()
cv2.destroyAllWindows()
程序运行结果如下图所示,左为原图,右为透视变换的图。

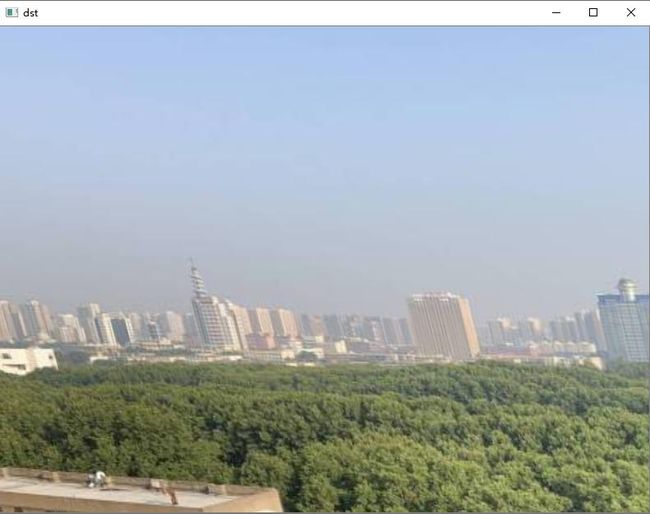
我们可以看到,原图片经过透视映射后,变成另一个视角下的任意四边形了。
5 重映射
重映射是修改了像素点的位置,从而生成一幅新的图像,包括:复制、绕x轴y轴翻转,x轴y轴互换,图像缩放等。
均使用cv2.remap()重映射函数进行操作。
需要注意cv2.remap()中的两个参数mapx、mapy。mapx表示对应位置上x轴坐标值,mapy表示对应位置上y轴坐标值。
(一)复制
使用cv2.remap()函数完成图像复制,需先定义mapx,mapy的值,然后循环映射每个像素点到对应的位置上。
代码如下:
import cv2
import numpy as np
img=cv2.imread('E:/python_opencv/tupian.jpg')
rows,cols=img.shape[:2] #读取行列数
mapx=np.zeros(img.shape[:2],np.float32) #mapx参数设定为对应位置上的x轴坐标值
mapy=np.zeros(img.shape[:2],np.float32) #mapy参数设定为对应位置上的y轴坐标值
for i in range(rows): #对每个元素复制映射
for j in range(cols):
mapx.itemset((i,j),j)
mapy.itemset((i,j),i)
rst=cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('original',img)
cv2.imshow('result',rst)
cv2.waitKey()
cv2.destroyAllWindows()
执行后结果如下所示,可以看到,实现了图像的复制重映射。


(二)绕x轴翻转
重映射法对图像绕x轴翻转,表明mapx的值保持不变,mapy的值调整为总行数-1-当前行号,其余部分代码不变,所以循环体内代码变为:
for i in range(rows):
for j in range(cols):
mapx.itemset((i,j),j) #mapx的值保持不变
mapy.itemset((i,j),rows-1-i) #mapy的值调整为总行数-1-当前行号
(三)绕y轴翻转
重映射法对图像绕y轴翻转,表明mapx的值调整为总行数-1-当前列号,mapy的值保持不变,所以循环体内代码变为:
for i in range(rows):
for j in range(cols):
mapx.itemset((i,j),cols-1-j) #mapx的值调整为总列数-1-当前列号
mapy.itemset((i,j),i) #mapy的值保持不变
(四)绕x轴y轴翻转
重映射也能实现图像绕x轴和y轴的同时翻转,只需将前两个部分合并,使mapx的值调整为总行数-1-当前列号,mapy的值调整为总行数-1-当前行号。例程如下:
import cv2
import numpy as np
img=cv2.imread('E:\python_opencv/tupian.jpg')
rows,cols=img.shape[:2]
mapx=np.zeros(img.shape[:2],np.float32)
mapy=np.zeros(img.shape[:2],np.float32)
for i in range(rows):
for j in range(cols):
mapx.itemset((i,j),cols-1-j) #mapx的值调整为总列数-1-当前列号
mapy.itemset((i,j),rows-1-i) #mapy的值调整为总行数-1-当前行号
rst=cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('original',img)
cv2.imshow('result',rst)
cv2.waitKey()
cv2.destroyAllWindows()
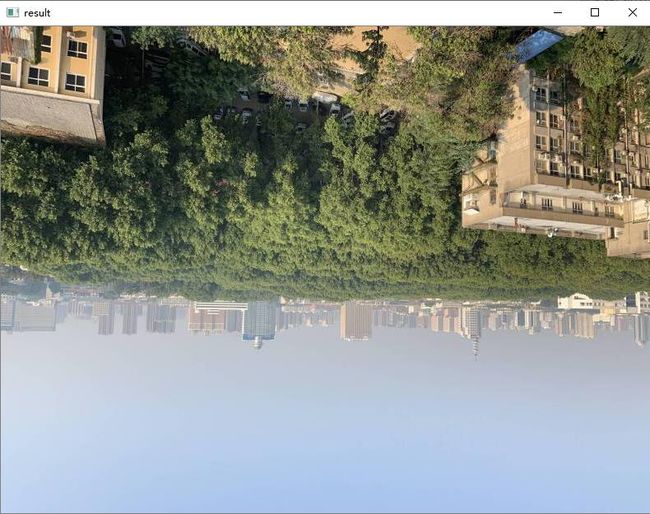
执行后结果如下所示,可以看到,实现了图像的绕x轴和y轴翻转重映射过程。

(五)x轴、y轴互换
重映射中,x轴、y轴互换表明,mapx的值变为所在行的行号,mapy的值变为所在列的列号。
但当行数和列数不一致时,行或列无法完成映射的部分就被处理为0。示例代码如下:
#使用函数cv2.remap()实现图像绕x轴和y轴的互换
import cv2
import numpy as np
img=cv2.imread('E:\python_opencv/tupian.jpg')
rows,cols=img.shape[:2]
mapx=np.zeros(img.shape[:2],np.float32)
mapy=np.zeros(img.shape[:2],np.float32)
for i in range(rows):
for j in range(cols):
mapx.itemset((i,j),i) #mapx的值变为所在行的行号
mapy.itemset((i,j),j) #mapy的值变为所在列的列号
rst=cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('original',img)
cv2.imshow('result',rst)
cv2.waitKey()
cv2.destroyAllWindows()
结果如图:

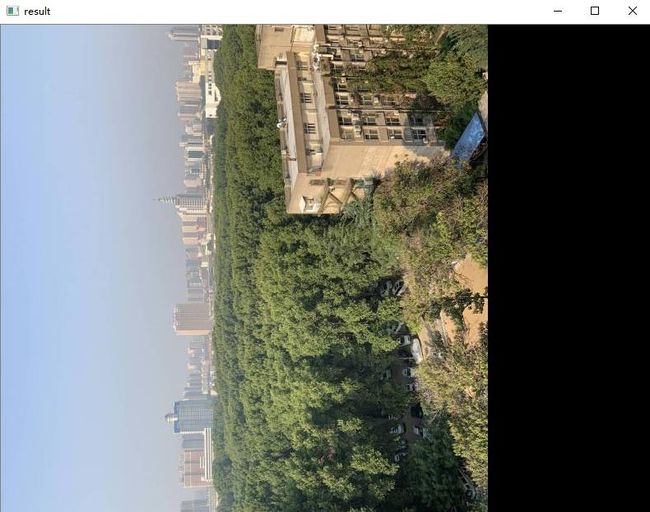
可以看到,列数多于行数的部分被置为0(黑色)。
(六)图像的缩放
重映射提供了cv2.remap()函数能够实现图像的放大或缩小。处理图像后,可以将图像固定在围绕其中心的某个区域。
下面例程中,x轴和y轴均缩小为原来的0.25-0.75倍之间。
import cv2
import numpy as np
img=cv2.imread('E:\python_opencv/tupian.jpg')
rows,cols=img.shape[:2]
mapx=np.zeros(img.shape[:2],np.float32)
mapy=np.zeros(img.shape[:2],np.float32)
for i in range(rows):
for j in range(cols):
if 0.25*cols < i < 0.75*cols and 0.25*rows < i < 0.75*rows:
#在目标图像的x轴(0.25-0.75)倍之内生成缩小图像
mapx.itemset((i,j),2*(j-0.25*cols)+0.5)
#在目标图像的y轴(0.25-0.75)倍之内生成缩小图像
mapy.itemset((i,j),2*(i-rows*0.25)+0.5)
else:
#不在上述区域的点都取(0,0)坐标点的值
mapx.itemset((i,j),0)
mapy.itemset((i,j),0)
rst=cv2.remap(img,mapx,mapy,cv2.INTER_LINEAR) #图像缩放重映射
cv2.imshow('original',img)
cv2.imshow('result',rst)
cv2.waitKey()
cv2.destroyAllWindows()

到此这篇关于OpenCV+Python几何变换的实现示例的文章就介绍到这了,更多相关OpenCV 几何变换内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!