PCL三维重建教程_点云滤波篇之剪裁(直通滤波、条件滤波) C++
讲在前面:
本教程类似于教会你加减乘除(点云基础、分割、滤波、配准),然后自己做一道包含加减乘除的综合题(实践操作)。
此教程用最简单的例程,给大家直观感受。就像做一道物理大题,我们总用理想情况,便于理解学习。因此,所有的示例都围绕斯坦福的小兔子展开。
我不会带你们看官方文档,而是用自己的想法和语言来表达,目的是让一头雾水的人会去应用。毕竟我知道,做这个的大多数人,也只是为了应用,如果去深究原理,必然也不会来到这里。很多东西,我们只会应用就会“高人一等”,原理重要吗?重要!但对于大多数人来说,没有必要。司机并不一定知道汽车内部是什么结构,怎样运行的,他只需要会开车。没错,所以我们只能是司机,但对于我们来说,足够了。在我看来学会了应用,才会去学习更深层次的东西。当你不知原因打印出一个"hello world!",那种神秘和兴奋,会引导你去想弄清楚,这到底是为什么。
前提准备:
首先说明我的环境:win10 +visual studio 2013 +PCL1.8.0
如果你使用其他版本,只要配置好了,也没有什么问题。
如果你还没有配置好环境,请看以下文章。
点我配置环境!
此外需要你有一定的c/c++,或是其他任意一门语言基础。
真的只需要基础就可以,这方面课程也比较多,请先自行去学习。
示例斯坦福兔子下载
ヾ( ̄ー ̄)X
进入正题!
滤波无非就是把数据中的噪声(无用的干扰信息)进行过滤去除。好比在景区拍照,你永远都会拍到别的游客!自拍除外。
其实记住一句话,滤波的核心就是调参。前人已经为我们设计了很多算法,也有人为我们把代码写入库内。 好人一生平安! 我们做的仅仅是简简单单的调参。
这就好像给一个二次函数寻找零点。
f ( x ) = x 2 − 2 f(x) = x^2-2 \quad \quad f(x)=x2−2
我们目的就是找到使f(x)最接近0的那个值,但前提是我们都是蠢b,只会代数。
其实面对一个真实数据,以我们目前的水平,就是蠢b。我们能做的只能是调参。
在实际问题中,可能各种滤波都不尽人意。而且,我们参数如果设置的不合理,会出现各种奇怪的错误。
本篇可能体会不到,下一篇才有感受!
你能不能处理好你的真实数据,修行就看个人了。
言归正传,在我看来,我们有两种方式去掉它,一种是简单粗暴的剪裁,另一种是筛点。
第一种:剪裁
我们也会看到这种方法叫做离群点去除,群不就是你想拍的东西吗?离群的自然是你不想拍的。
ConditionalRemoval(条件滤波)
//引用头文件,好人一生平安!
#include 请先读完代码注释!那就没什么好说的了。
所以重点是我们要知道点云的XYZ坐标分布!
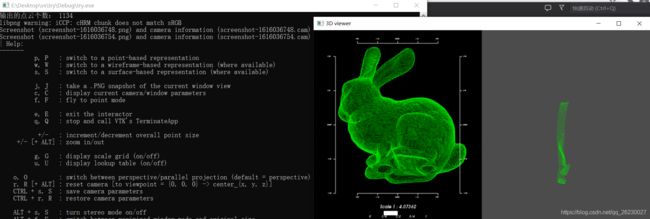
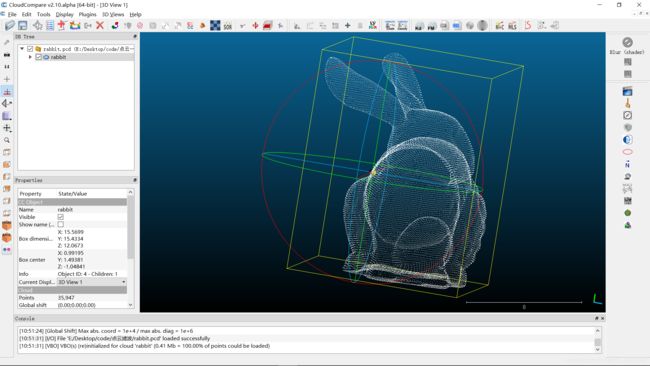
我们可以使用CloudCompare软件来查看,本人并不怎么会使用,如果有大神还请指教修改。
仔细看左下角写明了点云总体所占坐标体积,好吧,我只会凭感觉来,还没专门学过这个软件。
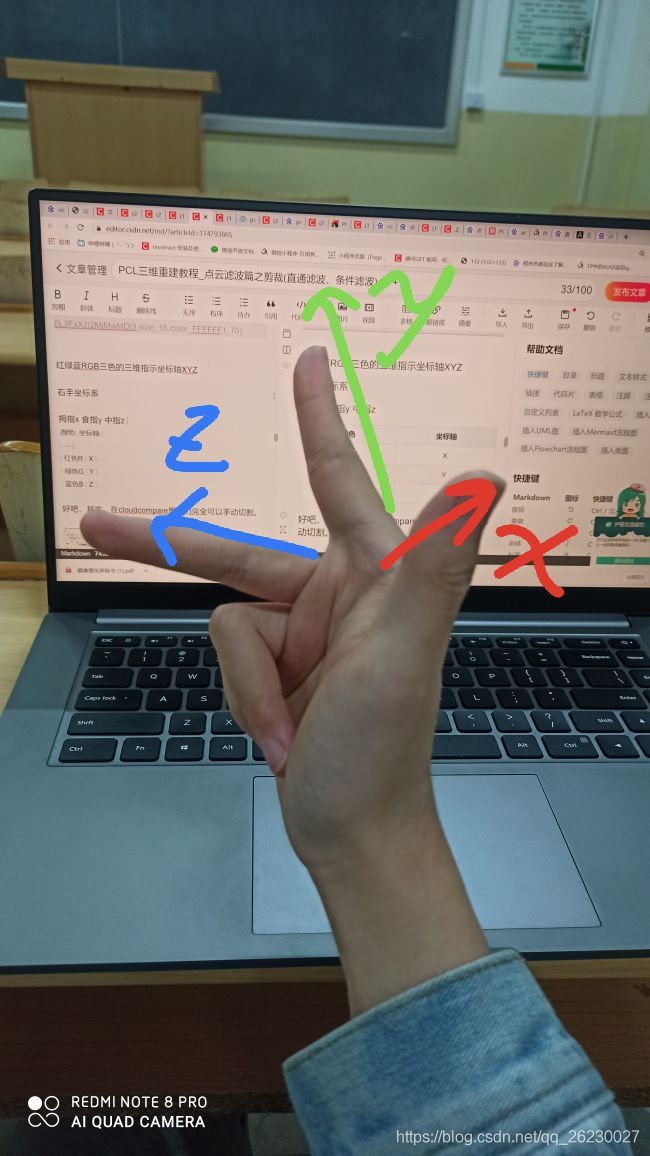
红绿蓝RGB三色的三维指示坐标轴XYZ
| 颜色 | 坐标轴 |
|---|---|
| 红色R | X |
| 绿色G | Y |
| 蓝色B | Z |
右手坐标系
拇指x 食指y 中指z 自己比划一下就知道了
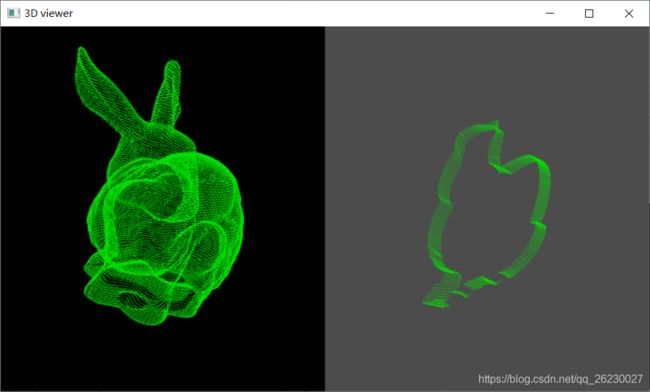
好吧,其实,在cloudcompare里我们完全可以手动切割。
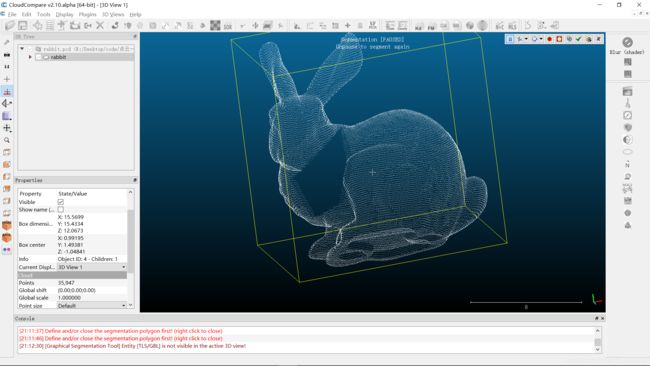
兔子:好像身体被掏空
这是不是说明我没有必要用代码了?
难道拍照有自带美颜功能,你就不给自己再P图了吗?
好像是,也好像不是。如果你有一堆点云数据需要处理呢,这种手动效果很好,但却很慢。
我从头到尾都会说:“自己要根据所要解决的问题进行选择”。
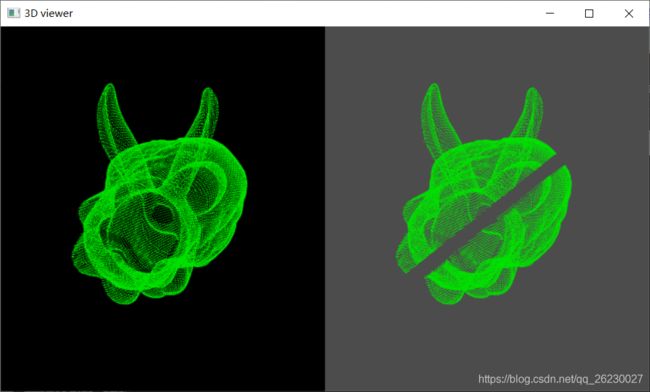
下面是代码例程效果:给大家切个兔子头
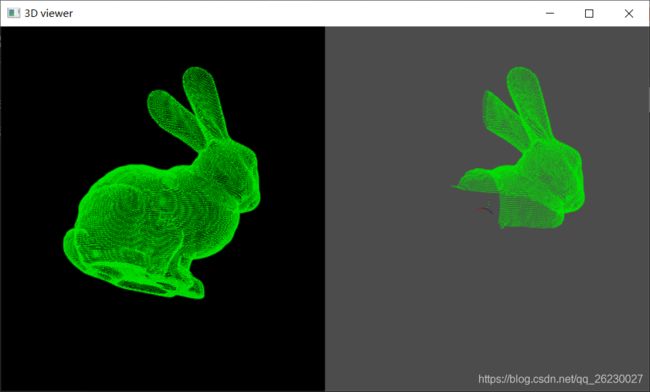
PassThrough(直通滤波)
#include 有什么区别?
直通滤波器在切割上貌似只能在一个轴上,除非再多创建几个滤波器。
至于跟条件滤波有什么区别?鄙人拙见,没什么区别。如果你只想过滤一个轴上的点,想更简洁更快,必然选择直通滤波。反之,还是条件滤波。
网上一般过滤z轴(我愿称之为深度轴),也就是一些远近点的过滤。
但如果我们三维重建一个物体,毫无疑问选择条件滤波,因为在x、y轴(我愿称之为平面轴),也有很多我们不需要的点,具体项目具体分析,适合自己解决问题的就是最好的。
例程效果如下:
pass.setFilterLimitsNegative (false);
修改该参数是一种取反的效果。
其实,这里重点我不是想介绍直通滤波。
我想说的是,你有没有发现两种滤波代码有什么不同,又有什么不同。
你会发现,两种代码的不同之处,只有头文件和定义滤波器部分罢了。
自然而然,我们用什么方法滤波,就要引用别人写好的头文件。
这就像更换天文望远镜的目镜一样,其他的代码根本不用动哈。
你甚至可以再定义多个滤波器,想怎么滤,就怎么滤。
pcl::方法<pcl::PointXYZ> 方法对象名;
//传入原来的点云cloud
方法对象名.setInputCloud(cloud);
...
...
...此处省略不同方法的参数的设置
//生成过滤后的点云cloud_filtered
方法对象名.filter(*cloud_filtered);
然后套娃就好,
你可以在下面把cloud_filtered传入另一种过滤方法对象,
传出时命名cloud_filtered_again 怎么命名随你啦
还是那句话,怎么过滤好,要根据自己的情况来。
什么,你还发现了读取点云的代码不一样?无非是两种方法罢了,都是可以替换的,是不是这种更简单?要学会变通!
文章开头我说过,滤波就是调参,我们改动的也不过只是滤波器内的参数,像这种剪裁方式的滤波还是比较好控制的。
另一种,我称之为点云滤波之筛点,比如:高斯滤波、半径滤波、体素滤波等等,下一篇再介绍。
根据点赞来决定下一篇何时发布。